一种基于能量跨关节转移的下肢纯被动外骨骼装置
1.本发明属于外骨骼相关技术领域,更具体地,涉及一种基于能量跨关节转移的下肢纯被动外骨骼装置。
背景技术:
2.行走时生活中常见的步态,而长距离的行走会消耗大量的体力,因此一定程度上限制了日常的活动范围。为了提高行走效率,降低行走时的能量消耗,多种外骨骼设计方案被提出。主要分为主动外骨骼和被动外骨骼;主动外骨骼需要采用电机,传感器等电子元件,一方面使得外骨骼的重量增加,穿戴复杂,另一方面也使得该外骨骼装置需要复杂的电路进行控制,还会由于电池续航能力有限、电机会带来额外负载等问题,难以运用到实际场景中。被动外骨骼能有效嵌入人体下肢肌骨系统的能量迁移回路,借助弹性元件高效的能量转换特性,降低下肢行走代谢能消耗,因此具有显著的实用意义和社会价值。
3.专利文献cn114347000a利用舵机和压力传感器将踝关节的运动分为助力阶段和自由阶段,增加了整个系统的控制难度,电机和齿轮的引入会增大整个系统的重量;从使用便捷性的角度出发,外骨骼应避免电机的引入。专利文献cn114347000a将踝关节助力阶段划分为脚跟和地面接触时开始至脚尖离开地面时结束,助力阶段不合理,根据图2,在脚跟和地面开始接触至脚尖离开地面这个时间段内有部分时间踝关节在进行背屈运动,不应进行跖屈助力,因此踝关节助力外骨骼应该在踝关节需要助力的时刻进行助力才合理。专利文献cn114347000a吸收膝关节在摆动相时弯曲和伸展阶段的能量,根据图1,在摆动相膝关节弯曲阶段,膝关节并不做负功,此阶段不适合用来做能量的储存,只有摆动相膝关节伸展做的负功可以用来被吸收。
4.专利文献cn208729781u利用鲍登线传动,在行走步态下,将双腿摆动时右膝关节产生的拉伸力传递至左足部的左足驱动件以及用于将双腿摆动时左膝关节产生的拉伸力传递至右足部的右足驱动件。将膝关节伸展时的力传递到对侧踝关节,会导致鲍登线护套的过度弯曲,而鲍登线护套的过度弯曲会增加鲍登线护套和鲍登线内部柔索的摩擦力,膝关节在摆动相时的负功很大一部分被摩擦力耗散掉,传递到对侧踝关节的功很小,因此被动外骨骼应避免鲍登线的使用。参考图1和图2,在行走步态周期的15%-42%膝关节也有一个小角度的伸展动作,但是此时对侧踝关节做背屈动作,所以专利文献cn208729781u设计的被动外骨骼在非助力时刻会干涉踝关节的自然运动,外骨骼的设计因尽量避免对人体关节的自然运动轨迹产生影响。
技术实现要素:
5.针对现有技术的缺陷,本发明的目的在于提供一种基于能量跨关节转移的下肢纯被动外骨骼装置,旨在解决现有下肢主动外骨骼中需要电子元件和电路控制的问题。
6.为实现上述目的,本发明提供了一种基于能量跨关节转移的下肢纯被动外骨骼装置,包括:第一穿戴件、第二穿戴件、第三穿戴件、第一传动绳、第二传动绳以及能量回收释
放装置;
7.所述第一穿戴件固定在穿戴者的大腿处,第二穿戴件固定在穿戴者的小腿处,第三穿戴件固定在穿戴者的脚后跟处;
8.所述能量回收装置包括:底座、第一驱动杆、第二驱动杆、转盘、以及储能扭簧;所述底座固定于第二穿戴件上;所述转盘、第二驱动杆以及第一驱动杆依次置于底座之上;所述储能弹簧置于底座和转盘之间,一端与底座固定,另一端与转盘下方固定;所述第一驱动杆的一端、第二驱动杆的一端以及转盘的中心同轴连接,且连接轴的底部固定在底座上方;所述转盘、第一驱动杆以及第二驱动杆均可相对连接轴转动,所述第二驱动杆的另一端固定在转盘上;
9.所述第一传动绳的一端连接第一穿戴件,另一端连接第一驱动杆的另一端;所述第二传动绳的一端连接第三穿戴件,另一端连接第二驱动杆的另一端;
10.在上一个步态周期中,当穿戴者行走步态处于摆动相,其膝关节进行伸展时,第一穿戴件和第二穿戴件之间的距离变大,第一传动绳带动第一驱动杆相对于连接轴转动,以进一步带动转盘转动,压缩储能扭簧进行储能,吸收膝关节在行走步态摆动相做的负功;
11.在下一个步态周期中,当穿戴者行走步态处于支撑相,其踝关节进行跖屈运动时,储能扭簧释放储能,转盘在储能扭簧弹力的作用下进行回位运动,所述第二驱动杆拉紧第二传动绳,从而向上拉紧第三穿戴件为穿戴者踝关节的跖屈蹬地提供助力。
12.在一个可选的示例中,所述能量回收装置还包括:主支撑轴、限位杆、限位导轨、驱动杆锁芯、转盘锁芯以及锁芯顶起件;
13.所述主支撑轴的顶端固定在底座中心,所述主支撑轴依次穿过转盘的中心、第二驱动杆的一端以及第一驱动杆的一端;所述转盘与底座之间留有空隙,所述限位导轨固定在底座上方,所述限位杆的一端连接转盘下方,另一端置于限位导轨上,可沿着限位导轨运动,所述限位杆与转盘可相互转动;
14.所述限位导轨上顺时针方向分别有第一位置、第二位置、第三位置以及第四位置,所述第一位置依次经第二位置、第三位置以及第四位置之后再到第一位置组成一个闭合路径,所述第二位置和第四位置相对,第三位置距离第一位置最近;
15.所述转盘锁芯固定在转盘上方,驱动杆锁芯固定在第一驱动杆下方;锁芯顶起件固定在底座上方,位于转盘的外沿;所述驱动杆锁芯的两侧是轴向方向的平面,顶端是径向方向的两个斜面组成的凸起尖端,且其尖端朝下,所述转盘锁芯的一侧是轴向方向的平面,另一侧是斜面,其斜面的爬坡方向朝上;
16.在上一个步态周期中,当穿戴者行走步态处于摆动相,其膝关节开始伸展时,第一驱动杆置于转盘锁芯的第一方位,此时驱动杆锁芯一侧平面与转盘锁芯的平面侧距离最近,膝关节伸展过程中,第一穿戴件和第二穿戴件之间的距离变大,第一传动绳带动第一驱动杆相对于主支撑轴沿第一方向转动,在驱动杆锁芯的一侧平面运动到与转盘锁芯的平面侧接触后,驱动杆锁芯和转盘锁芯相互作用并带动转盘转动,进而压缩储能扭簧进行储能;储能扭簧被压缩储能阶段,转盘带动限位杆从第一位置经第二位置向第三位置移动;当膝关节伸展到第一预设角度时,驱动杆锁芯与锁芯顶起件接触,当伸展角度进一步增大时,锁芯顶起件将驱动杆锁芯向上顶起,使驱动杆锁芯与转盘锁芯脱离,第一驱动杆运动到转盘锁芯的第二方位,同时限位杆运动到第三位置,由于第三位置距离第一位置最近,导致限位
杆被卡在第三位置处,使转盘无法回转,以将储能扭簧的储能保持;所述转盘锁芯的第一方位和第二方位分别对应转盘锁芯的两端。
17.在一个可选的示例中,在下一个步态周期中,当穿戴者行走步态处于支撑相,在支撑相的第一阶段,其膝关节开始屈曲时,第一驱动杆位于转盘锁芯的第二方位,当第一穿戴件和第二穿戴件之间的距离变小,第一驱动杆沿第二方向回转,在回转后的某个时间点驱动杆锁芯的另一侧底部斜面会与转盘锁芯的顶部斜面接触,之后驱动杆锁芯被转盘锁芯向上顶起而越过转盘锁芯,之后第一驱动杆回转到转盘锁芯的第一方位;所述第一方向和第二方向对应逆时针方向和顺时针方向。
18.在一个可选的示例中,在下一个步态周期中,当穿戴者行走步态处于支撑相,在支撑相的第二阶段,其膝关节开始伸展时,第一传动绳带动第一驱动杆相对于主支撑轴沿第一方向转动,当膝关节伸展到第二预设角度时,驱动杆锁芯的一侧平面开始与转盘锁芯的平面侧接触,此时限位杆准备离开限位导轨上的第三位置,当伸展角度进一步增大时,锁芯顶起件将驱动杆锁芯向上顶起,使驱动杆锁芯与转盘锁芯脱离,此过程中限位杆由第三位置运动到第四位置处,此后转盘在储能扭簧的弹力下进行复位运动。
19.在一个可选的示例中,在下一个步态周期中,当穿戴者行走步态处于支撑相,在支撑相的第三阶段,其膝关节伸展后,踝关节开始进行跖屈运动,转盘在储能扭簧的弹力作用下进行回位,限位杆从第四位置运动到第一位置,转盘回位过程中带动第二驱动杆相对于主支撑轴沿第二方向转动,拉紧第二传动绳,从而向上拉紧第三穿戴件为穿戴者踝关节的跖屈蹬地提供助力。
20.在一个可选的示例中,在下一个步态周期中,当穿戴者行走步态处于摆动相,在摆动相的第一阶段,转盘完全回位,膝关节继续做屈曲运动,第一驱动杆继续做回转运动;
21.在摆动相的第二阶段,其膝关节进行伸展,第一穿戴件和第二穿戴件之间的距离变大,第一传动绳带动第一驱动杆再次相对于主支撑轴转动,并通过驱动杆锁芯和转盘锁芯的相互作用带动转盘转动,再次压缩储能扭簧进行储能。
22.在一个可选的示例中,该装置还包括:盖板、第一驱动杆回位扭簧;所述盖板置于第一驱动杆上方,与主支撑轴的顶端连接;所述第一驱动杆回位扭簧置于第一驱动杆上方,一端与第一驱动杆连接,另一端与盖板连接。
23.在一个可选的示例中,该装置还包括:片弹簧限位罩、复位片弹簧、滑轮以及滑轮支撑轴;
24.所述滑轮支撑轴一端固定在底座边沿,另一端固定在盖板边沿;
25.所述滑轮固定在滑轮支撑轴上,可相对滑轮支撑轴转动,所述第一传动绳和第二传动绳穿过滑轮,所述滑轮用来对第一传动绳和第二传动绳起导向作用;
26.所述片弹簧限位罩固定在第一驱动杆上,其将复位片弹簧压在驱动杆锁芯上,以便所述驱动杆锁芯被顶起后回位。
27.总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
28.本发明通过对关键组件如大腿穿戴件、小腿穿戴件、脚部穿戴件和能量回收释放装置的设计及相互配合,获得一种基于能量跨关节转移的膝踝关节纯被动外骨骼助力装置,能将摆动相膝关节伸展所做负功转换成踝关节跖屈辅助力矩,可有效降低行走时人体
膝、踝关节负载和代谢能消耗;
29.本发明提供的一种基于能量跨关节转移的膝踝关节纯被动外骨骼助力装置,通过随膝关节运动角度触发的能量回收和释放,可根据行走相位自动提供适时的助力,无需复杂电路控制;
30.本发明提供的一种基于能量存储的膝踝关节纯被动外骨骼助力装置为纯被动,未使用电机、传感器等电子元件,具有重量轻、可靠性高、穿戴方便等优点;
31.本发明提供的一种基于能量存储的膝踝关节纯被动外骨骼助力装置利用助力对象行走时自身膝关节做的负功进行助力,不需要电池等外部供能装置,可长时间持续使用。
附图说明
32.图1是行走步态下单个周期内膝关节角度曲线、力矩曲线、功率曲线图。
33.图2是行走步态下单个周期内踝关节角度曲线、力矩曲线、功率曲线图。
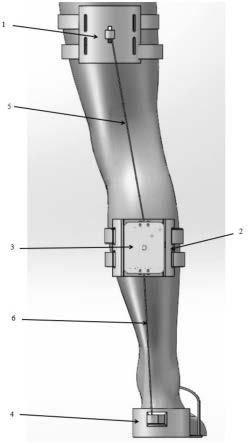
34.图3是按照本发明的优选实施例所构建的基于能量跨关节转移的下肢纯被动外骨骼装置的结构示意图。
35.图4是按照本发明的优选实施例所构建的能量回收释放装置的爆炸图。
36.图5是按照本发明的优选实施例所构建的能量回收释放装置的正视图。
37.图6是按照本发明的优选实施例所构建的能量回收释放装置的斜视图。
38.图7是按照本发明的优选实施例所构建的限位导轨的正视图。
39.图8是按照本发明的优选实施例所构建的驱动杆锁芯和转盘锁芯结构示意图。
40.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中包括:1-大腿穿戴件,2-小腿穿戴件,3-能量回收释放装置,4-脚部穿戴件,5-膝关节传动绳,6-踝关节传动绳,301-盖板,302-片弹簧限位罩,303-复位片弹簧,304-驱动杆锁芯,305-滑轮支撑轴,306-滑轮,307-转盘,308-转盘锁芯,309-限位导轨,310-底座,311-锁芯顶起件,312-限位杆,313-储能扭簧,314-踝绳驱动杆,315-主支撑轴,316-膝绳驱动杆,317-膝绳驱动杆回位扭簧。
具体实施方式
41.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
42.本发明属于外骨骼相关技术领域,并公开了一种基于能量跨关节转移的下肢纯被动外骨骼装置。该外骨骼装置包括大腿穿戴件、小腿穿戴件、脚部穿戴件、能量回收释放装置、膝关节传动绳、踝关节传动绳,其中,大腿穿戴件穿戴在大腿处,小腿穿戴件穿戴在小腿处,脚部穿戴件穿戴在脚底,能量回收释放装置的工作原理是利用膝关节在行走步态周期内有两次最大伸展角度的特性,自动实现能量的存储和释放。在行走步态摆动相膝关节伸展阶段,外骨骼处于储能模式,扭簧被压缩,吸收膝关节伸展所做的负功,当膝关节伸展角度达到最大时,扭簧的弹性势能被锁住;在下一个步态周期的支撑相膝关节再次达到最大伸展角度时刻,扭簧开始释放能量,此时外骨骼开始释放能量对踝关节跖屈蹬地进行跖屈助力。本发明采用纯被动的结构实现膝关节能量的收集和释放,解决外骨骼中需要电子元
件和电路控制的问题。
43.图3为本发明实施例提供的一种基于能量跨关节转移的下肢纯被动外骨骼装置结构图,其包括大腿穿戴件1、小腿穿戴件2、能量回收释放装置3和脚部穿戴件4、膝关节传动绳5、踝关节传动绳6。其中,如图3所示,所述大腿穿戴件1、小腿穿戴件2和脚部穿戴件4固定在使用者大腿、小腿和脚部,用于将外骨骼和人体耦合起来,所述能量回收释放装置3用于储存行走步态摆动相膝关节伸展时做的负功,并在下一个步态周期的踝关节跖屈蹬地阶段释放能量为踝关节跖屈提供助力。
44.如图4、图5、图6所示,底座310固定在小腿穿戴件2上;盖板301、锁芯顶起件311、限位导轨309固定在底座310上;主支撑轴315、滑轮支撑轴305固定于盖板301和底座310之间;转盘锁芯308固定在转盘307上。
45.限位杆312一端固定于转盘307,可以相对于转盘307转动,另一端不固定,运动轨迹受限位导轨309约束,可以沿着限位导轨309内的箭头轨迹运动;储能扭簧313一端固定于底座312,另一端固定于转盘307;转盘307转动带动储能扭簧313扭转进行储能;膝绳驱动杆回位扭簧317一端固定于盖板301,另一端固定于膝绳驱动杆316固定,为膝绳驱动杆316的回位提供回复力;片弹簧限位罩302固定在膝绳驱动杆316上,将复位片弹簧303压在驱动杆锁芯304上;当外力作用于驱动杆锁芯304底部时,驱动杆锁芯304可以相对膝绳驱动杆316做直线运动,从而压缩复位片弹簧303;当撤去外力时,由于复位片弹簧303的弹力,驱动杆锁芯304回到初始的位置。
46.滑轮306可以相对滑轮支撑轴305转动,起到对膝关节传动绳5和踝关节传动绳6的导向作用;膝绳驱动杆316、踝绳驱动杆314、转盘307可以相对于主支撑轴315转动。
47.膝关节传动绳5一端与大腿穿戴件1相连,一端与膝绳驱动杆316相连;踝绳驱动绳6一端与脚部穿戴件4相连,一端与踝绳驱动杆314相连。
48.如图1、图3、图4、图5、图6、图7、以及图8所示,行走步态摆动相膝关节伸展阶段(75%-98%)为储能阶段,在此阶段,大腿穿戴件1和小腿穿戴件2之间的距离变大,膝关节传动绳5带动膝绳驱动杆316相对于主支撑轴315转动,膝绳驱动杆316上的驱动杆锁芯304通过和转盘锁芯308相互作用带动转盘307转动,从而压缩储能扭簧313进行储能,吸收膝关节在行走步态摆动相做的负功。在此储能阶段,转盘307带动限位杆312在限位导轨309内沿路径3091-3092-3093运动,当膝关节在摆动相末期即将伸展到最大时,驱动杆锁芯304开始与锁芯顶起件311接触,当膝关节进一步伸展到最大时,锁芯顶起件311将驱动杆锁芯304向上顶起而与转盘锁芯308脱离,与此同时限位杆312运动到限位导轨309内的位置3092处;之后储能扭簧313带动转盘307回转,限位杆312沿限位导轨309内的路径3092-3093运动到位置3093处,之后由于限位导轨309在位置3093处的特殊结构形状,限制了转盘307的后续回转运动,从而实现吸收和存储行走步态摆动相膝关节伸展阶段做的负功;在整个行走步态摆动相膝关节伸展阶段,踝关节传动绳6一直处于松弛状态,不会干涉踝关节的自然运动。
49.如图1、图3、图4、图5、图6、图7、以及图8所示,在下一个步态周期的0%-15%,膝关节屈曲,大腿穿戴件1和小腿穿戴件2之间的距离变小,膝绳驱动杆316在膝绳驱动杆回位扭簧317的作用下回转从而使膝关节传动绳5始终处于微张紧的状态;膝绳驱动杆316回转时,某个时间点其上的驱动杆锁芯304会与转盘锁芯308接触,因为两个接触面都是斜面,驱动杆锁芯304会被相对的向上顶起而越过转盘锁芯308,转盘锁芯308不会干涉膝绳驱动杆316
的正常回位;在步态周期的这个阶段踝关节传动绳6依然是松弛状态。
50.如图1、图3、图4、图5、图6、图7、以及图8所示,在下一个步态周期的15%-42%,膝关节进行伸展,当膝关节即将伸展到最大时,驱动杆锁芯304开始与转盘锁芯308接触,此时限位杆312准备离开限位导轨309内的位置3093;当膝关节进一步伸展到最大时驱动杆锁芯304被锁芯顶起件311向上顶起而与转盘锁芯308分离,此过程中限位杆312沿限位导轨内的路径3093-3094运动到位置3094处;此后转盘307在储能扭簧313的弹力作用下进行复位运动,此过程中与转盘307相连的限位杆312在限位导轨309内沿路径3094-3091运动;在步态周期的这个阶段,踝关节进行背屈运动,踝关节传动绳6逐渐趋向于张紧状态,在步态周期的42%时刻,踝关节背屈角度最大,踝关节传动绳6刚好处于初始张紧状态。
51.如图1、图3、图4、图5、图6、图7所示,在下一个步态周期的42%-58%,踝关节进行跖屈运动,此时转盘307正在储能扭簧313的弹力作用下进行回位运动,从而为踝关节的跖屈蹬地提供助力;在步态周期的这个阶段膝关节做屈曲运动,膝绳驱动杆316在膝绳驱动杆回位扭簧317的作用下做回转运动,膝关节传动绳5始终处于微张紧状态,不影响膝关节的正常运动。
52.如图1、图3、图4、图5、图6、图7所示,在下一个步态周期的58%-75%,转盘307完全复位,膝关节继续做屈曲运动,膝绳驱动杆316继续做回转运动,膝关节传动绳5始终处于微张紧状态;在步态周期的这个阶段踝关节传动绳6处于松弛状态。
53.接着进行下一个周期内的储能和放能循环。
54.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1