人体和动物行为姿态检测装置的制作方法
1.本发明涉及行为姿态检测技术领域,具体为人体和动物行为姿态检测装置。
背景技术:
2.随着整个社会人口老龄化的急速加剧,对老年人身体状态的检测也是有着很大的需求,现如今市场上出现的监测人体跌倒状态的仪器类型很少,现有的检测设备中存在以下几个缺陷:
3.第一,例如现有申请号:cn201420824953.5的文件中,该发明使用操作简便且使用效果好,具有摄像功能,同时具有语音报警和语音通话功能,实际使用过程中,能对对检测对象的人体姿态和人体温度进行实时检测,但该发明功能较为单一,仅能对人体姿态进行检测;
4.第二,当前家庭中,大多数家庭会进行饲养宠物猫,但需要对宠物猫每天进行投喂猫粮、清水,增加了喂养员的操作疲劳强度,不能够自动化对宠物进行喂养;
5.第三,且在对宠物猫进行喂养时,不能根据宠物猫的行为进行判断宠物猫是否饥饿或口渴,容易出现猫粮浪费等情况发生,不能实时满足宠物猫的需求;
6.第四,家中无人时,宠物无人陪伴且精力充足时,容易出现宠物在家中折腾并“拆家”的行为,不能及时的释放宠物所需的运动。
技术实现要素:
7.本发明的目的在于提供人体和动物行为姿态检测装置,用于克服现有技术中的上述缺陷。
8.根据本发明的人体和动物行为姿态检测装置,包括机壳,所述机壳顶壁上固设有顶块,所述顶块前侧壁上安装有摄像头,所述机壳右侧壁上安装有紧急呼救器,所述机壳前侧壁内设有开口朝前的喂水腔,所述喂水腔左右侧壁上滑动连接有开口朝上的喂水盒,所述喂水盒底壁与所述喂水腔底壁之间固定连接有左右位置对称的第一弹簧,所述喂水盒内设有为宠物进行投喂水的放水机构;
9.所述喂水腔右侧的所述机壳前侧壁内固设有开口朝前的投喂腔,所述投喂腔左右侧壁上滑动连接有开口朝上的投喂盒,所述投喂盒底壁与所述投喂腔底壁之间固定连接有左右位置对称的第二弹簧,所述投喂盒右侧壁内设有对宠物进行投放宠物粮的投食机构;
10.所述顶块右侧顶壁上固设有开口朝上的滑动腔,所述滑动腔后侧壁上滑动连接有滑块,所述滑动腔后侧壁上固设有第一齿条,所述滑块内设有带动所述滑块上下移动的升降机构。
11.有益地,所述放水机构包括固设于顶块顶壁内的储水腔,所述储水腔顶壁上固设有贯穿所述顶块顶壁的进水管,所述储水腔底壁上连通有贯穿所述顶块底壁并与所述喂水腔顶壁连通的出水管,所述出水管内安装有第一电控球阀,所述喂水盒右侧壁内设有第一升降槽,所述第一升降槽左侧底壁与所述喂水盒开口连通,所述第一升降槽顶壁上安装有
第一感应器,所述第一升降槽内滑动连接有水浮球,所述第一升降槽底壁内安装有第二感应器。
12.这样,可以根据宠物的行为并自动对宠物进行喂水工作。
13.有益地,所述投食机构包括固设于顶块顶壁内的储料腔,所述储料腔上方的所述顶块顶壁上安装有盖板,所述储料腔后侧壁内固设有第一电机,所述第一电机上安装有延伸至所述储料腔前侧壁上的第一转动轴,所述第一转动轴上等间距固设有六个搅动板,所述储料腔底壁上固设有贯穿所述储料腔底壁并与所述投喂腔顶壁连通的出料管,所述出料管内安装有第二电控球阀,所述投喂盒右侧壁内设有控制槽,所述控制槽上下侧壁上安装有上下位置对称的抵压板,所述控制槽右侧的所述投喂腔右侧壁上安装有控制开关,所述控制开关可控制所述第二电控球阀的打开或关闭。
14.这样,可以根据宠物的行为对宠物自动进行投食工作。
15.有益地,所述升降机构包括固设于所述滑块右侧壁内的转动腔,所述转动腔底壁内安装有第二电机,所述第二电机上安装有贯穿所述转动腔顶壁并延伸至所述滑动腔内的第二转动轴,所述转动腔内的所述第二转动轴上固设有第一锥齿轮,所述转动腔左侧的所述滑块左侧壁内设有贯穿所述滑块前后侧壁的第二升降槽,所述滑块右侧顶壁上固设有限位块,所述第二转动轴贯穿所述限位块顶壁并延伸至所述限位块顶壁上方,所述限位块内的所述第二转动轴上固设有第三锥齿轮,所述第三锥齿轮左侧的所述限位块左侧壁内设有第一滑动槽,所述第二升降槽内设有辅助所述升降机构工作的辅助机构。
16.这样,可以带动滑块上下移动。
17.有益地,所述辅助机构包括固设于所述第二升降槽左侧壁上的第一从动轴,所述第一从动轴内设有开口朝左的第二滑动槽,所述第二滑动槽内滑动连接有第二从动轴,所述第二滑动槽左侧壁内设有阴极电磁铁,所述第二从动轴左侧壁内固设有阳极电磁铁,所述第二从动轴左侧壁与所述第二滑动槽左侧壁之间安装有第三弹簧,所述第二从动轴右端贯穿所述第二升降槽右侧壁并延伸至所述转动腔内,所述转动腔内的所述第二从动轴上固设有与所述第一锥齿轮啮合的第二锥齿轮,所述第二升降槽内的所述第二从动轴上固设有与所述第一齿条啮合的第一齿轮,所述第二转动轴上端铰连接有转盘,所述转盘右侧壁内安装有第一液压缸,所述第一液压缸上安装有朝右的第一伸缩杆,所述第一伸缩杆右端安装有逗猫棒,所述限位块左侧壁内设有自动与宠物进行互动的互动机构。
18.这样,可以带动宠物进行互动。
19.有益地,所述互动机构包括转动连接于所述第一滑动槽左侧壁上并延伸至所述第三锥齿轮左侧的蜗杆,所述蜗杆右端固设有与所述第三锥齿轮啮合的第四锥齿轮,所述第一滑动槽后侧的所述第一滑动槽左右侧壁上滑动连接有往复块,所述往复块内设有贯穿所述往复块前后侧壁的往复槽,所述往复槽左右侧壁内固设有左右位置对称的第二齿条,所述第一滑动槽后侧壁上转动连接有延伸至所述往复槽内的第三从动轴,所述往复槽内的所述第三从动轴上固设有分别与二个所述第二齿条啮合的不完全齿轮,所述不完全齿轮前侧的所述第三从动轴上固设有与所述蜗杆啮合的蜗轮,所述往复块顶壁上固设有延伸至所述滑动腔内的连杆,所述连杆顶壁与所述转盘底壁滑动连接,所述机壳底壁内设有左右位置对称的移动机构。
20.这样,可以根据宠物的行为与宠物进行玩耍互动。
21.有益地,所述移动机构包括固设于所述机壳底壁内的滚动槽,所述滚动槽顶壁上固设有第二液压缸,所述第二液压缸安装有延伸至所述滚动槽内的第二伸缩杆,所述第二伸缩杆下端固设有连接板,所述连接板后侧壁上转动连接有左右位置对称的二个第四从动轴,所述第四从动轴上固设有滚动轮,所述第四从动轴上设有带动所述滚动轮转动的转动机构。
22.有益地,所述转动机构包括固设于二个所述第四从动轴上的第二齿轮,二个所述第二齿轮之间安装有链条,二个所述滚动槽之间的所述机壳底壁内安装有双轴电机,所述双轴电机上安装有左右位置对称并延伸至所述滚动槽内的第三转动轴,所述滚动槽内的所述第三转动轴上固设有第一辅助锥齿轮,靠近所述第一辅助锥齿轮的所述第四从动轴上固设有可与所述第一辅助锥齿轮啮合的第二辅助锥齿轮。
23.这样,可以根据人体行为控制设备的移动并将紧急呼救器输送至人身边,为倒地的病人提供呼救的机会。
24.本发明的有益效果是:
25.本发明通过放水机构、投食机构、升降机构、辅助机构、互动机构、移动机构和转动机构可以对人体和宠物猫的行为姿态进行检测,并通过人和宠物的行为分别进行自动喂水、自动投喂猫粮、紧急呼救的工作;
26.本发明通过摄像头可以自动对人体和宠物的行为进行监测判断,并通过水浮球可以对宠物猫自动进行喂水工作,不需要人工手动对宠物进行喂水工作;
27.本发明通过控制开关可以自动对宠物猫进行投喂猫粮的工作,避免了需要每天手动喂养宠物猫的问题,减少了人工操作;
28.本发明通过摄像头检测人体行为,并判断躺在地上的人体是否突发疾病等紧急情况,通过紧急呼救器可以自动拨打呼救电话并播放所在住址的语音进行求救,保障家庭人员的安全。
附图说明
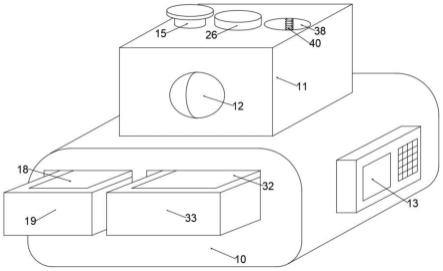
29.图1是本发明的外观示意图;
30.图2是本发明的人体和动物行为姿态检测装置整体结构示意图;
31.图3是本发明图2中第一升降槽的示意图;
32.图4是本发明图2中控制槽的示意图;
33.图5是本发明图2中滑动腔的示意图;
34.图6是本发明图5中第一从动轴的示意图;
35.图7是本发明图5中限位块的示意图;
36.图8是本发明图7中第一滑动槽的示意图;
37.图9是本发明图2中滚动槽的示意图;
38.如图:
39.10、机壳;11、顶块;12、摄像头;13、紧急呼救器;14、储水腔;15、进水管;16、出水管;17、第一电控球阀;18、喂水腔;19、喂水盒;20、第一弹簧;21、第一升降槽;22、第一感应器;23、水浮球;24、第二感应器;25、储料腔;26、盖板;27、第一电机;28、第一转动轴;29、搅动板;30、出料管;31、第二电控球阀;32、投喂腔;33、投喂盒;34、第二弹簧;35、控制槽;36、
控制开关;37、抵压板;38、滑动腔;39、滑块;40、第一齿条;41、转动腔;42、第二电机;43、第二转动轴;44、第一锥齿轮;45、第二升降槽;46、第一从动轴;47、第二滑动槽;48、第二从动轴;49、阳极电磁铁;50、阴极电磁铁;51、第三弹簧;52、第一齿轮;53、第二锥齿轮;54、限位块;55、第三锥齿轮;56、第一滑动槽;57、蜗杆;58、第四锥齿轮;59、往复块;60、往复槽;61、第二齿条;62、第三从动轴;63、蜗轮;64、不完全齿轮;65、连杆;66、转盘;67、逗猫棒;68、第一液压缸;69、第一伸缩杆;70、滚动槽;71、双轴电机;72、第三转动轴;73、第一辅助锥齿轮;74、第二液压缸;75、第二伸缩杆;76、连接板;77、第四从动轴;78、第二齿轮;79、链条;80、滚动轮;81、第二辅助锥齿轮;82、放水机构;83、投食机构;84、升降机构;85、辅助机构;86、互动机构;87、移动机构;88、转动机构。
具体实施方式
40.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明的简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
41.为使本发明实现的技术手段、创作特征、达到目的与功效易于明白了解,下面结合实施例对本发明作进一步说明:
42.参照附图1-图9所示的人体和动物行为姿态检测装置,包括机壳10,所述机壳10顶壁上固设有顶块11,所述顶块11前侧壁上安装有摄像头12,所述机壳10右侧壁上安装有紧急呼救器13,所述机壳10前侧壁内设有开口朝前的喂水腔18,所述喂水腔18左右侧壁上滑动连接有开口朝上的喂水盒19,所述喂水盒19底壁与所述喂水腔18底壁之间固定连接有左右位置对称的第一弹簧20,所述喂水盒19内设有为宠物进行投喂水的放水机构82;
43.所述喂水腔18右侧的所述机壳10前侧壁内固设有开口朝前的投喂腔32,所述投喂腔32左右侧壁上滑动连接有开口朝上的投喂盒33,所述投喂盒33底壁与所述投喂腔32底壁之间固定连接有左右位置对称的第二弹簧34,所述投喂盒33右侧壁内设有对宠物进行投放宠物粮的投食机构83;
44.所述顶块11右侧顶壁上固设有开口朝上的滑动腔38,所述滑动腔38后侧壁上滑动连接有滑块39,所述滑动腔38后侧壁上固设有第一齿条40,所述滑块39内设有带动所述滑块39上下移动的升降机构84。
45.在本实施例中,所述放水机构82包括固设于顶块11顶壁内的储水腔14,所述储水腔14顶壁上固设有贯穿所述顶块11顶壁的进水管15,所述储水腔14底壁上连通有贯穿所述顶块11底壁并与所述喂水腔18顶壁连通的出水管16,所述出水管16内安装有第一电控球阀17,所述喂水盒19右侧壁内设有第一升降槽21,所述第一升降槽21左侧底壁与所述喂水盒19开口连通,所述第一升降槽21顶壁上安装有第一感应器22,所述第一升降槽21内滑动连接有水浮球23,所述第一升降槽21底壁内安装有第二感应器24,当所述第一电控球阀17打开,所述储水腔14内的清水通过所述出水管16流入所述喂水盒19内,清水通过所述喂水盒19流入所述第一升降槽21内,清水带动所述水浮球23向上浮动,所述水浮球23抵压所述第一感应器22,所述第一感应器22控制所述第一电控球阀17关闭。
46.在本实施例中,所述投食机构83包括固设于顶块11顶壁内的储料腔25,所述储料
腔25上方的所述顶块11顶壁上安装有盖板26,所述储料腔25后侧壁内固设有第一电机27,所述第一电机27上安装有延伸至所述储料腔25前侧壁上的第一转动轴28,所述第一转动轴28上等间距固设有六个搅动板29,所述储料腔25底壁上固设有贯穿所述储料腔25底壁并与所述投喂腔32顶壁连通的出料管30,所述出料管30内安装有第二电控球阀31,所述投喂盒33右侧壁内设有控制槽35,所述控制槽35上下侧壁上安装有上下位置对称的抵压板37,所述控制槽35右侧的所述投喂腔32右侧壁上安装有控制开关36,所述控制开关36可控制所述第二电控球阀31的打开或关闭,当所述第一电机27启动,所述第一电机27通过所述第一转动轴28带动六个所述搅动板29转动,所述第二电控球阀31打开,所述储料腔25内的宠物粮通过所述出料管30掉落至所述投喂盒33内,宠物粮堆积在所述投喂盒33内并带动所述投喂盒33向下移动并挤压二个所述第二弹簧34,所述投喂盒33带动所述抵压板37抵压所述控制开关36向下转动,所述控制开关36控制所述第二电控球阀31和所述第一电机27关闭。
47.在本实施例中,所述升降机构84包括固设于所述滑块39右侧壁内的转动腔41,所述转动腔41底壁内安装有第二电机42,所述第二电机42上安装有贯穿所述转动腔41顶壁并延伸至所述滑动腔38内的第二转动轴43,所述转动腔41内的所述第二转动轴43上固设有第一锥齿轮44,所述转动腔41左侧的所述滑块39左侧壁内设有贯穿所述滑块39前后侧壁的第二升降槽45,所述滑块39右侧顶壁上固设有限位块54,所述第二转动轴43贯穿所述限位块54顶壁并延伸至所述限位块54顶壁上方,所述限位块54内的所述第二转动轴43上固设有第三锥齿轮55,所述第三锥齿轮55左侧的所述限位块54左侧壁内设有第一滑动槽56,所述第二升降槽45内设有辅助所述升降机构84工作的辅助机构85,当所述第二电机42启动,所述第二电机42通过所述第二转动轴43带动所述第一锥齿轮44转动。
48.在本实施例中,所述辅助机构85包括固设于所述第二升降槽45左侧壁上的第一从动轴46,所述第一从动轴46内设有开口朝左的第二滑动槽47,所述第二滑动槽47内滑动连接有第二从动轴48,所述第二滑动槽47左侧壁内设有阴极电磁铁50,所述第二从动轴48左侧壁内固设有阳极电磁铁49,所述第二从动轴48左侧壁与所述第二滑动槽47左侧壁之间安装有第三弹簧51,所述第二从动轴48右端贯穿所述第二升降槽45右侧壁并延伸至所述转动腔41内,所述转动腔41内的所述第二从动轴48上固设有与所述第一锥齿轮44啮合的第二锥齿轮53,所述第二升降槽45内的所述第二从动轴48上固设有与所述第一齿条40啮合的第一齿轮52,所述第二转动轴43上端铰连接有转盘66,所述转盘66右侧壁内安装有第一液压缸68,所述第一液压缸68上安装有朝右的第一伸缩杆69,所述第一伸缩杆69右端安装有逗猫棒67,所述限位块54左侧壁内设有自动与宠物进行互动的互动机构86,当所述第一锥齿轮44转动,所述第一锥齿轮44通过与所述第二锥齿轮53啮合带动所述第二从动轴48转动,所述第二从动轴48通过所述第一齿轮52与所述第一齿条40啮合带动所述第一从动轴46上下移动,所述第一从动轴46带动所述滑块39上下移动。
49.在本实施例中,所述互动机构86包括转动连接于所述第一滑动槽56左侧壁上并延伸至所述第三锥齿轮55左侧的蜗杆57,所述蜗杆57右端固设有与所述第三锥齿轮55啮合的第四锥齿轮58,所述第一滑动槽56后侧的所述第一滑动槽56左右侧壁上滑动连接有往复块59,所述往复块59内设有贯穿所述往复块59前后侧壁的往复槽60,所述往复槽60左右侧壁内固设有左右位置对称的第二齿条61,所述第一滑动槽56后侧壁上转动连接有延伸至所述往复槽60内的第三从动轴62,所述往复槽60内的所述第三从动轴62上固设有分别与二个所
述第二齿条61啮合的不完全齿轮64,所述不完全齿轮64前侧的所述第三从动轴62上固设有与所述蜗杆57啮合的蜗轮63,所述往复块59顶壁上固设有延伸至所述滑动腔38内的连杆65,所述连杆65顶壁与所述转盘66底壁滑动连接,所述机壳10底壁内设有左右位置对称的移动机构87,当所述第二转动轴43转动,所述第二转动轴43通过所述第三锥齿轮55带动所述第四锥齿轮58转动,所述第四锥齿轮58通过所述蜗杆57带动所述蜗轮63转动,所述蜗轮63通过所述第三从动轴62带动所述不完全齿轮64转动,所述不完全齿轮64通过与二个所述第二齿条61啮合带动所述往复块59上下移动,所述第二转动轴43带动所述转盘66转动的同时所述往复块59通过所述连杆65带动所述转盘66左右摆动,所述第一液压缸68启动,所述第一伸缩杆69伸长并带动所述逗猫棒67向远离所述限位块54的一侧移动,所述逗猫棒67与宠物进行互动,带动宠物进行玩耍。
50.在本实施例中,所述移动机构87包括固设于所述机壳10底壁内的滚动槽70,所述滚动槽70顶壁上固设有第二液压缸74,所述第二液压缸74安装有延伸至所述滚动槽70内的第二伸缩杆75,所述第二伸缩杆75下端固设有连接板76,所述连接板76后侧壁上转动连接有左右位置对称的二个第四从动轴77,所述第四从动轴77上固设有滚动轮80,所述第四从动轴77上设有带动所述滚动轮80转动的转动机构88,当所述第二液压缸74启动,所述第二伸缩杆75伸长并带动所述连接板76向下移动。
51.在本实施例中,所述转动机构88包括固设于二个所述第四从动轴77上的第二齿轮78,二个所述第二齿轮78之间安装有链条79,二个所述滚动槽70之间的所述机壳10底壁内安装有双轴电机71,所述双轴电机71上安装有左右位置对称并延伸至所述滚动槽70内的第三转动轴72,所述滚动槽70内的所述第三转动轴72上固设有第一辅助锥齿轮73,靠近所述第一辅助锥齿轮73的所述第四从动轴77上固设有可与所述第一辅助锥齿轮73啮合的第二辅助锥齿轮81,当所述双轴电机71启动,所述双轴电机71通过所述第三转动轴72带动所述第一辅助锥齿轮73转动,所述第二液压缸74启动并带动所述第二辅助锥齿轮81和所述滚动轮80向下移动,所述滚动轮80与地面进行接触,所述第二辅助锥齿轮81向下移动并与所述第一辅助锥齿轮73啮合,所述第一辅助锥齿轮73通过与所述第二辅助锥齿轮81啮合带动靠近所述第一辅助锥齿轮73的二个所述第二辅助锥齿轮81转动,所述第二辅助锥齿轮81通过所述第四从动轴77带动所述第二齿轮78转动,所述第二齿轮78通过所述链条79带动远离所述第一辅助锥齿轮73的所述第四从动轴77转动,所述第四从动轴77带动滚动轮80转动,所述滚动轮80与地面进行转动并带动所述机壳10进行移动。
52.本发明的人体和动物行为姿态检测装置,其工作流程如下:
53.初始状态:所述储水腔14内存储有喂养宠物猫的清水,所述储料腔25内储存有喂养宠物猫的猫粮,所述第一电控球阀17和所述第二电控球阀31均处于关闭状态,所述控制开关36位于二个所述抵压板37之间并不与二个所述抵压板37接触,所述第二锥齿轮53与所述第一锥齿轮44啮合,所述第二辅助锥齿轮81与所述第一辅助锥齿轮73脱离啮合,所述第一辅助锥齿轮73位于所述第二辅助锥齿轮81正下方,所述阴极电磁铁50和所述阳极电磁铁49处于断电状态;
54.第一步,当所述摄像头12启动,所述摄像头12对室内宠物和人体行为进行实时监测,当所述摄像头12监测到宠物猫走近所述机壳10,并将头伸入所述喂水盒19内时,则可判断为宠物猫需要进行喝水,所述第一电控球阀17打开,所述出水管16将所述储水腔14内的
清水通入所述喂水盒19内,清水通过所述喂水盒19流入所述第一升降槽21内,清水带动所述水浮球23向上浮动,所述水浮球23抵压所述第一感应器22,所述第一感应器22控制所述第一电控球阀17关闭,若宠物猫不能一次性将所述喂水盒19内的清水喝完,宠物猫再次靠近所述喂水盒19时,所述第一电控球阀17则一直处于关闭状态即处于自锁状态,直至宠物猫将所述喂水盒19内的清水喝完,所述水浮球23下端与所述第二感应器24抵压接触,所述第一电控球阀17接触自锁状态,当下次所述摄像头12检测到宠物猫靠近所述喂水盒19时,所述第一电控球阀17即可再次打开;
55.第二步,所述摄像头12对室内宠物和人体行为进行实时监测,当所述摄像头12监测到宠物猫走近所述机壳10,并将头伸入所述投喂盒33内时,所述第一电机27启动,所述第一电机27通过所述第一转动轴28带动六个所述搅动板29转动,所述第二电控球阀31打开,所述储料腔25内的宠物粮通过所述出料管30掉落至所述投喂盒33内,宠物粮堆积在所述投喂盒33内并带动所述投喂盒33向下移动并挤压二个所述第二弹簧34,所述投喂盒33带动所述抵压板37抵压所述控制开关36向下转动,所述控制开关36控制所述第二电控球阀31和所述第一电机27关闭,若宠物猫不能一次性将所述投喂盒33内的猫粮吃完,所述投喂盒33仍受到猫粮的重量,所述控制开关36仍受到所述抵压板37的抵压,所述第二电控球阀31则一直处于关闭状态即处于自锁状态,直至宠物猫将所述投喂盒33内的猫粮吃完,所述第二电控球阀31恢复至初始状态即所述控制开关36位于二个所述抵压板37之间并不与二个所述抵压板37接触,所述第二电控球阀31解除自锁即当下次宠物猫接触所述投喂盒33时,所述第二电控球阀31可再次打开并释放猫粮;
56.第三步,所述摄像头12对室内宠物和人体行为进行实时监测,当所述摄像头12监测到宠物猫在室内来回乱跑时,即可认为宠物猫需要玩耍互动,所述第二电机42启动,所述第二电机42通过所述第二转动轴43带动所述第一锥齿轮44转动,所述第一锥齿轮44通过与所述第二锥齿轮53啮合带动所述第二从动轴48转动,所述第二从动轴48通过所述第一齿轮52与所述第一齿条40啮合带动所述第一从动轴46向上移动,所述第一从动轴46带动所述滑块39向上移动,并将所述限位块54伸出所述顶块11顶壁上方,当所述限位块54位于所述顶块11顶壁上方时,所述阴极电磁铁50和所述阳极电磁铁49通电,所述阴极电磁铁50和所述阳极电磁铁49相互吸引,所述第二从动轴48带动所述第一齿轮52和所述第二锥齿轮53向左移动并将所述第二锥齿轮53与所述第一锥齿轮44脱离啮合,所述第二转动轴43带动所述第三锥齿轮55和所述转盘66转动,所述第一液压缸68启动,所述第一伸缩杆69伸长并将所述逗猫棒67远离所述限位块54的一侧伸出,所述第二转动轴43通过所述转盘66带动所述逗猫棒67进行转动,所述第三锥齿轮55通过与所述第四锥齿轮58啮合带动所述蜗杆57转动,所述蜗杆57通过与所述蜗轮63啮合带动所述第三从动轴62转动,所述第三从动轴62通过所述不完全齿轮64分别与二个所述第二齿条61啮合带动所述往复块59上下移动,所述第二转动轴43带动所述转盘66转动的同时所述往复块59通过所述连杆65带动所述转盘66左右摆动,所述逗猫棒67在转动的同时进行上下摆动,所述逗猫棒67带动宠物猫进行互动,宠物猫通过抓取转并上下摆动的所述逗猫棒67进行玩耍;
57.若与宠物猫互动完毕后,宠物猫不再去抓取所述逗猫棒67并远离所述机壳10时,所述第一液压缸68反向启动并将所述逗猫棒67移动靠近至所述转盘66,所述阳极电磁铁49和所述阴极电磁铁50断电,所述第三弹簧51通过弹力将所述第二从动轴48向右弹出并将所
述第二锥齿轮53再次与所述第一锥齿轮44啮合,所述第一齿轮52与所述第一齿条40啮合,所述第二电机42反向启动,所述第二电机42带动所述滑块39向下移动至所述滑动腔38内,并将所述转盘66整个完全移动至所述滑动腔38内;
58.第四步,当所述摄像头12监测到有人躺在地上时,所述摄像头12对人体行为进行判断,可视为人倒地昏迷或突发疾病难以起身,所述第二液压缸74启动,所述第二伸缩杆75伸长并带动所述连接板76向下移动,所述双轴电机71启动,所述双轴电机71通过所述第三转动轴72带动所述第一辅助锥齿轮73转动,所述连接板76带动所述第二辅助锥齿轮81和所述滚动轮80向下移动,所述滚动轮80与地面进行接触,所述第二辅助锥齿轮81向下移动并与下方的所述第一辅助锥齿轮73啮合,所述第一辅助锥齿轮73通过与所述第二辅助锥齿轮81啮合带动靠近所述第一辅助锥齿轮73的二个所述第二辅助锥齿轮81转动,所述第二辅助锥齿轮81通过所述第四从动轴77带动所述第二齿轮78转动,所述第二齿轮78通过所述链条79带动远离所述第一辅助锥齿轮73的所述第四从动轴77转动,所述第四从动轴77带动滚动轮80转动,所述滚动轮80与地面进行转动并带动所述机壳10进行移动,并将所述机壳10移动至倒地人员的身边,并不断来回用所述机壳10轻微撞击倒地的人,促使倒地的人尽快清醒,若倒地的人员一段时间内仍无反应时,所述紧急呼救器13自动启动并自动拨打求救电话,并自动播报所在的家庭住址的语音为医护人员提供求救地点;
59.若人还有意识并清醒但难以起身时,人通过所述紧急呼救器13自动选择拨打急救电话或家人电话并等待救援。
60.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的技术人员可以明确,在不脱离本发明的总体精神以及构思的情形下,可以做出对于以上实施例的各种变型。其均落入本发明的保护范围之内。本发明的保护方案以本发明所附的权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1