一种基于图像分析安全验证的核酸混检自采样方法与系统与流程
1.本发明涉及图像处理技术领域,具体公开了一种基于图像分析安全验证的核酸混检自采样方法与系统。
背景技术:
[0002][0003]
鉴于疫情的严峻形势,急需一款能代替人工标准化、高质量完成拭子采样、样品保存液回收和病毒消杀等大规模核酸筛查采样全流程工作的自动化核酸采样机器人,除了具备无需人工辅助即可自动完成核酸采样全流程工作的现有核酸自动采样机器人系统的性能、以便降低人工采样工作量和避免交叉感染外,还应满足混检需求,以及一定程度内的偏差自纠能力。
技术实现要素:
[0004]
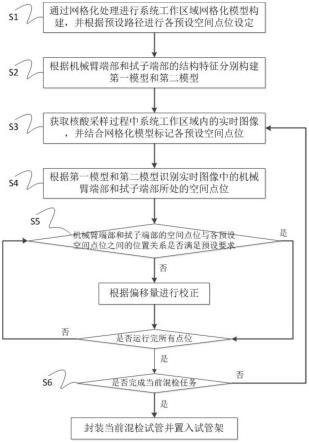
为了实现核酸混检的自动化采取,同时降低运行偏差导致的操控失准问题,本发明提出了一种基于图像分析安全验证的核酸混检自采样方法,包括步骤:
[0005]
s1:通过网格化处理进行系统工作区域网格化模型构建,并根据预设路径进行各预设空间点位设定;
[0006]
s2:根据机械臂端部和拭子端部的结构特征分别构建第一模型和第二模型;
[0007]
s3:获取核酸采样过程中系统工作区域内的实时图像,并结合网格化模型标记各预设空间点位;
[0008]
s4:根据第一模型和第二模型识别实时图像中的机械臂端部和拭子端部所处的空间点位;
[0009]
s5:依次判断机械臂端部和拭子端部的空间点位与各预设空间点位之间的位置关系是否满足预设要求,若否,根据偏移量进行校正并进入s6步骤,若是,进入s6步骤;
[0010]
s6:判断是否完成当前混检任务,若是,封装当前混检试管并置入试管架,若否,返回s3步骤。
[0011]
进一步地,所述机械臂在核酸采样过程中,当机械臂端部依次运行至各预设空间点位时,依次完成拭子夹取、核酸采样、拭子装管、拭子裁剪、试管封装和试管入架的操作。
[0012]
进一步地,所述机械臂在核酸采样操作时,基于深度相机图像进行拭子端部空间点位的调控。
[0013]
进一步地,所述s6步骤中,当前混检任务判定完成的条件为完成预设次数核酸采样,机械臂端部和拭子端部以预设要求运行一次预设路径记录为完成一次核酸采样。
[0014]
进一步地,所述s6步骤中,还包括步骤:
[0015]
判断核酸采样完成次数是否与当前阶段扫码登记人数一致,若否,系统报错。
[0016]
本发明还提出了一种基于图像分析安全验证的核酸混检自采样系统,包括:
[0017]
点位设定模块,用于通过网格化处理进行系统工作区域网格化模型构建,并根据
预设路径进行各预设空间点位设定;
[0018]
器械建模模块,用于根据机械臂端部和拭子端部的结构特征分别构建第一模型和第二模型;
[0019]
图像采集模块,用于获取核酸采样过程中系统工作区域内的实时图像;
[0020]
器械识别模块,用于通过实时图像结合网格化模型标记各预设空间点位,并根据第一模型和第二模型识别实时图像中的机械臂端部和拭子端部所处的空间点位;
[0021]
轨迹纠正模块,用于在机械臂端部和拭子端部的空间点位与各预设空间点位之间的位置关系不满足预设要求时,依次根据偏移量进行校正;
[0022]
封装调控模块,用于完成当前混检任务时控制机械臂封装当前混检试管并置入试管架。
[0023]
进一步地,所述机械臂在核酸采样过程中,当机械臂端部依次运行至各预设空间点位时,依次完成拭子夹取、核酸采样、拭子装管、拭子裁剪、试管封装和试管入架的操作。
[0024]
进一步地,所述机械臂在核酸采样操作时,基于深度相机图像进行拭子端部空间点位的调控。
[0025]
进一步地,所述封装调控模块中,当前混检任务判定完成的条件为完成预设次数核酸采样,机械臂端部和拭子端部以预设要求运行一次预设路径记录为完成一次核酸采样。
[0026]
进一步地,所述封装调控模块中,还包括:
[0027]
人数核对单元,用于在核酸采样完成次数与当前阶段扫码登记人数不一致时系统报错。
[0028]
与现有技术相比,本发明至少含有以下有益效果:
[0029]
(1)本发明所述的一种基于图像分析安全验证的核酸混检自采样方法与系统,通过对实时图像中端部特征点与预设空间点位的识别,进行机械臂轨迹和拭子采样状态的判定,在出现点位信息不满足预设要求时及时对机械臂进行轨迹调整,从而避免混检是操作次序颠倒问题的发生;
[0030]
(2)通过采样完成次数、预测次数核酸采样、扫码登记人数的核对,可根据实际需求实现单人或多人核酸混检下的核酸检测,同时满足数据配准,避免漏检问题的发生。
附图说明
[0031]
图1为一种基于图像分析安全验证的核酸混检自采样方法的步骤图;
[0032]
图2为一种基于图像分析安全验证的核酸混检自采样系统的结构图;
[0033]
图3为预设空间点位位置示意图。
[0034]
附图标记说明:1-拭子点、2-采样点、3-收集试管/剪棉签点、4-核验棉签端部剪断点、5-医疗垃圾回收点。
具体实施方式
[0035]
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
[0036]
实施例一
[0037]
与现有智能核酸采样机器人一样的,本发明也是由机械臂自动夹取试管、扫描管壁二维码、拧开盖并放到待收集采样标本的位置,完成采样准备工作。随后,受检人员一次扫描排队等待线外的二维码进行身份登记并到达指定位置待检,而后机械臂自动完成拭子夹取、核酸采样、拭子装管、拭子裁剪(也即是仅保留棉签端、去除持握端)、试管封装和试管入架的操作,直到受检人数达到目标混检数量,再由机械臂夹取新试管启动下一组采样,直至采样任务全部完成。为提高采样过程中的准确性,如图1所示,本发明提出了一种基于图像分析安全验证的核酸混检自采样方法,包括步骤:
[0038]
s1:通过网格化处理进行系统工作区域网格化模型构建,并根据预设路径进行各预设空间点位设定;
[0039]
s2:根据机械臂端部和拭子端部的结构特征分别构建第一模型和第二模型;
[0040]
s3:获取核酸采样过程中系统工作区域内的实时图像,并结合网格化模型标记各预设空间点位;
[0041]
s4:根据第一模型和第二模型识别实时图像中的机械臂端部和拭子端部所处的空间点位;
[0042]
s5:依次判断机械臂端部和拭子端部的空间点位与各预设空间点位之间的位置关系是否满足预设要求,若否,根据偏移量进行校正并进入s6步骤,若是,进入s6步骤;
[0043]
s6:判断是否完成当前混检任务,若是,封装当前混检试管并置入试管架,若否,返回s3步骤。
[0044]
其中,机械臂在执行核酸采样操作时,是基于深度相机图像实现的拭子端部空间点位的调控。
[0045]
从上述步骤描述可以看出,本发明并不简单的根据预设轨迹进行的机械臂操控,而是在采样过程中,为确保采样质量,避免出现混检时序颠倒、漏检等问题的出现,采用的双重安全校验机制,只有校验机制通过,才能进入下一空间点位,否则,先解决校验发现的问题。
[0046]
核酸采样的预设路径示意图如图3所示,以一个具体实施例为例,首先通过网格化处理,根据预设路径进行工作区域网格化模型的构建,并对拭子点1、采样点2、收集试管/剪棉签点3、核验棉签端部剪断点4和医疗垃圾回收点5 进行精确空间点位设定。而后根据机械臂端部和拭子端部的结构特征分别构建第一模型和第二模型,以便后续图像跟踪的时候进行动态视频图像分析,根据图像识别分析结果来判定机器人系统是否运行在预定路径以及是否运动到预设空间点位。此外,通过网格化空间和特征识别功能的结合,以校验核酸采样每个关键步骤是否达到设定功能。比如,在点位5和点位1之间识别到机械臂端部、不能识别拭子端部,而点位1和点位2之间可同时识别到机械臂端部和拭子端部,表明机械臂成功自动夹取拭子;点位1和点位2之间可同时识别到机械臂端部和拭子端部、而在点位4识别不到拭子端部,表明机械臂成功将采样拭子端部自动送到回收试管、且棉签自动剪断拭子端部被试管回收。
[0047]
通过基于动态视频图像分析的空间点位识别对系统内各端部特征点进行位置判定,从而实现对于操作路径的安全判定,并在当前路径点正确或者校正后再运行至下一路径点,从而避免单次核酸采样期间各操作的时序颠倒。
[0048]
而为了避免采样过程中的漏检,出上文所述的安全校验外,在整个核酸采样过程
中还包括第二种安全校验,以确保混检功能的实现,实现方式为复核二维码身份登记人数和核酸采样次数是否与预设核酸采样次数(也即是单试管总计采样数)一致。其中,机械臂端部和拭子端部以预设要求运行一次预设路径记录记为完成一次核酸采样。只有当这三个计数相等时,才能执行下一试管的核酸采样,否则就会系统报错,提醒工作人员来进行复核。
[0049]
对于上述两种校验,如果校验失败,则根据失败的具体原因,系统能自动处置的由系统自动处置,系统不能自动处置的,则通过人工的方式处置。比如,因机械臂故障偏离固定路径运行或关键点位运行不到位导致安全校验失败,则可由系统自动纠偏和(或)重新运行进行系统自动处置;或者因机械臂夹取拭子失败,也可由机械臂重新回到点位1重新抓取进行系统自动处置;甚至在点位4如果识别到拭子端部仍在(剪棉签失败而拭子端部并未被试管回收),则机械臂重新回到点位3重新剪棉签、拭子端部被试管回收等。系统不能自动处置的校验失败将发报警,提醒人工进行核验、并采取补救处置。
[0050]
实施例二
[0051]
为了更好的对本发明的技术内容进行理解,本实施例通过系统结构的形式来对本发明进行阐述,如图2所示,一种基于图像分析安全验证的核酸混检自采样系统,包括:
[0052]
点位设定模块,用于通过网格化处理进行系统工作区域网格化模型构建,并根据预设路径进行各预设空间点位设定;
[0053]
器械建模模块,用于根据机械臂端部和拭子端部的结构特征分别构建第一模型和第二模型;
[0054]
图像采集模块,用于获取核酸采样过程中系统工作区域内的实时图像;
[0055]
器械识别模块,用于通过实时图像结合网格化模型标记各预设空间点位,并根据第一模型和第二模型识别实时图像中的机械臂端部和拭子端部所处的空间点位;
[0056]
轨迹纠正模块,用于在机械臂端部和拭子端部的空间点位与各预设空间点位之间的位置关系不满足预设要求时,依次根据偏移量进行校正;
[0057]
封装调控模块,用于完成当前混检任务时控制机械臂封装当前混检试管并置入试管架。
[0058]
进一步地,机械臂在核酸采样过程中,当机械臂端部依次运行至各预设空间点位时,依次完成拭子夹取、核酸采样、拭子装管、拭子裁剪、试管封装和试管入架的操作。
[0059]
进一步地,机械臂在核酸采样操作时,基于深度相机图像进行拭子端部空间点位的调控。
[0060]
进一步地,封装调控模块中,当前混检任务判定完成的条件为完成预设次数核酸采样,机械臂端部和拭子端部以预设要求运行一次预设路径记录为完成一次核酸采样。
[0061]
进一步地,封装调控模块中,还包括:
[0062]
人数核对单元,用于在核酸采样完成次数与当前阶段扫码登记人数不一致时系统报错。
[0063]
综上所述,本发明所述的一种基于图像分析安全验证的核酸混检自采样方法与系统,通过对实时图像中端部特征点与预设空间点位的识别,进行机械臂轨迹和拭子采样状态的判定,在出现点位信息不满足预设要求时及时对机械臂进行轨迹调整,从而避免混检是操作次序颠倒问题的发生。
[0064]
通过采样完成次数、预测次数核酸采样、扫码登记人数的核对,可根据实际需求实现单人或多人核酸混检下的核酸检测,同时满足数据配准,避免漏检问题的发生。
[0065]
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0066]
另外,在本发明中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0067]
在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0068]
另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1