弹性成像装置和方法与流程
所公开内容的技术涉及一种弹性成像装置和方法。该技术尤其涉及被如下布置的这样一种装置:-通过移动与待表征的组织接触的尖端,生成在该组织中行进的弹性波,-发送超声波脉冲并接收对应的回波,以跟踪弹性波如何在该组织中传播,从而表征组织的硬度。
背景技术:
例如通过振动受控瞬时弹性成像测量方法所测量的肝脏硬度,已经被证明是一种帮助专业医护人员用来检测或表征肝脏疾病或损伤,以及更普遍地用来监测对象的肝脏状况的非常有用的工具。图1示意性地示出了现有技术的一种弹性成像装置1a,该弹性成像装置1a适用于通过振动受控瞬时弹性成像测量方法来测量肝脏硬度。该装置包括了具有探头2a,探头2a具有:-待被手持的外壳3a;-能被低频振动器5a相对于外壳3a移动的尖端4a;以及-安装在尖端4a端部的超声换能器6a(可以带有覆盖该超声换能器的密封膜)在测量期间,以如下方式手持探头外壳3a:将超声换能器6a稍微压靠受检对象的身体8。然后触发尖端4a的瞬时位移,导致超声换能器6a向对象的身体移动并且返回,由此在组织中生成低频弹性波(尤其是一种低频剪切波)。超声换能器的相应位移d(t)在图2中示意性地随时间t示出。d(t)更精确地对应于在时刻t换能器6a相对于换能器6a初始位置(即瞬时振动开始前一刻的位置)沿着指向对象身体的z轴(见图1)的位置。如图2所示,从低频振动被触发开始,超声换能器6a发射超声波脉冲usp序列s。这些超声波脉冲使得能够跟踪在面向探头的组织中引起的弹性波在组织中如何行进。为此,对应于该序列中两个连续的超声射束(shot)的回波信号被关联在一起,以针对组织的不同深度确定组织在两个脉冲期间移动的距离。在每次测量中,组织中的应变图(有时也被称为弹性成像图,位移图或剪切波传播图)因此可被确定而作为该组织的深度z的函数。图3示出了作为时间t和深度z的函数的通过施加低频振动(例如图2表示的振动)而得到的对象肝脏中的应变图。上述关于弹性波在受试组织中传播的时空表示被称作弹性成像。此举使得人们可以非常清楚地看到这种波是如何在组织中传播的。组织中的剪切波传播能够由上述图像中示出的直线斜率确定,该直线显示了作为时间和深度函数的波前位置。然后组织的硬度由传播速度推导出。当分析和处理在这种测量处理期间记录的回波信号时,期望补偿超声换能器6a的位移d(t)。实际上,在这样的装置中,超声换能器6a是被固定在移动的尖端4a其本身上。所以,当尖端4a移动时,换能器6a和这种组织或组织的这种部分之间的距离发生变化。在没有校正的情况下,可以观察到这样或这样的应变的表观深度会因此与实际发生这种应变的深度有细微差别。
此外,对于在给定时间通过一对两个连续的发射射束确定组织中的应变(通过对两个对应的回波信号进行相关性分析),超声换能器在这两个脉冲之间产生的位移会导致在整个组织中的明显的整体位移,其叠加在由在内部行进的弹性波造成的组织的真实位移上。这一偏移在每个深度下是相同的,且可以通过计算在所考虑的时间出所确定的组织位移的z-导数来容易地抑制,如在以下文献:l.sandrin等人于2002年4月发表于ieee超声学、铁电体与频率控制汇刊(ieee transactions on ultrasonics,ferroelectrics,and frequency control)第49卷第4期436页-446页“shear elasticity probe for soft tissues with 1-d transient elastography(具有一维瞬时弹性成像的软组织剪切弹性探头)”的第三章a部分(440页)所解释的那样。同样,如在该文献所解释的那样,非常期望在对记录的两个回波信号执行相关性分析前补偿换能器的位移。实际上,在没有补偿换能器的移动时,由相关性分析测量到的位移显著更大,且因此对产生噪声并且需要更多时间来确定。为了在进行回波信号的相关性分析之前补偿换能器的位移d(t),通常会采用以下技术。发射声脉冲序列s,并且记录响应接收的回波信号,如上所述。接着这些回波信号被中央电子单元7a进行后处理,中央电子单元7a具备计算机结构且与探头2a可操作地连接。例如在上文提到的文献中描述的这种后处理包括:a)从回波信号自身估计换能器的位移d(t);b)对于每个回波信号,通过将该回波信号的傅里叶变换乘上exp(j2πfδt)来在频域中补偿(在步骤a中计算的)换能器的位移d(t),其中,f是频率,δt等于2.d/v
us
,v
us
是组织中超声波的速度;c)对回波信号进行相关性分析,以针对每一时间t确定作为深度z地函数的组织位移;d)可选地,计算步骤c中得到的时空位移图的z-导数在步骤a中,换能器的位移d(t)可以通过在每个回波信号中识别与假设处于组织中固定位置的元件相关联的强背反射来估计。也可以假设在组织的非常深处的组织位移是可忽略的,且在组织深处观测到的位移实际上对应于两个脉冲之间的换能器的位移,来估计该位移。上述步骤通常是令人满意的。不过,发明人注意到对于所记录的一些回波信号,步骤a可能会失败,因此提供了所讨论的回波信号的换能器的位移d(t)的错误数值。这些回波信号因此被错误地重新对齐,从而导致损害最终得到的弹性图的一些嘈杂的破坏性列。此外,该步骤在存储、数据传输和计算方面需要大量的计算资源,因此限制了超声脉冲的脉冲重复率。在振动受控瞬时弹性成像的情况下,这种约束更加受限,因为振动(如正弦振动)被重复、持续地施加待表征的组织上,而由该振动造成的组织形变会被实时监控。
技术实现要素:
为了至少能够部分地解决上文提到的问题,提供了弹性成像装置,包括:-用于紧贴对象身体的探头,探头包括:o单个超声换能器;或多个超声换能器,被布置为在待表征组织中发射超声脉冲的探头的所有超声换能器相对于彼此静止,以及
o低频振动器,低频振动器被布置成引起所述单个超声换能器或多个超声换能器朝向所述组织的位移,并且-电子单元,电子单元被配置为控制单个超声换能器或多个超声换能器发射超声脉冲序列,并被配置为获取由单个超声换能器或多个超声换能器响应于所发射的超声脉冲而接收的回波信号,以便跟踪由单个超声波换能器或多个超声波换能器的位移在组织中引起的弹性波如何在所述组织中行进,-电子单元进一步被配置为针对单个或多个所发射的超声脉冲生成:o发射时间偏移量(temporal offset upon emission),超声脉冲的发射通过偏移了该发射时间偏移量,o和/或接收时间偏移量(temporal offset upon reception),响应于所发射的所述超声脉冲获取的回波信号偏移了该接收时间偏移量,发射时间偏移和/或接收时间偏移被调整而作为单个换能器或多个换能器的位移的函数。更具体地说,发射时间偏移和/或接收时间偏移可被调整,使得其差值作为2.d/v
us
的函数而变化,其中d是单个换能器或多个超声换能器例如在发射时的位移,而v
us
是在所述组织中的超声的速度。发射时间偏移和/或接收时间偏移可由此产生,以便补偿所述回波信号相对于所获取的其他回波信号的时间偏移,该时间偏移由超声换能器或多个超声换能器在所述超声脉冲序列期间发生的位移造成。通过以可控的方式延迟所讨论的超声脉冲的发射,例如使用一个可控的延迟器连接在探头的超声脉冲器上游的可控延迟,这些发射在时间上偏移了发射时间偏移量。换句话说,在发射时的该时间偏移是在时域上实现的。每个回波信号都是在发射所讨论的脉冲之后随时间由换能器接收的信号而形成。更准确地说,在给定时间窗口(例如参见图4)内接收到的信号,该时间窗口从该发射之后开始并具有给定持续时间(例如,持续时间是100μs,如果人们想要探查7.5cm以上深度的组织,则超声声速v
us
应为1.5mm/μs)。在实践中,在时间窗口内接收到的形成所讨论的回波信号的信号被记录,或者,换句话说,被写入到探头的存储器中。接收时间偏移是通过移动时间窗口(可以是获取或是记录的时间窗口,如上所述)的起点而得到的。无论如何,本文中该时间偏移是在时域上实现。在上文所示的弹性成像装置中,由超声换能器或多个超声换能器在测量期间的移动所导致的在不同回波信号之间的时间偏移在开始时、在发射时和/或刚接收时(即在回波信号被记录或把它们传输至远程计算单元之前)被实时补偿。相较于上文在背景技术章节所阐述的后处理方法,该补偿方案显著地降低了计算负担。其结果是,所公开的补偿方案改善了弹性成像装置地计算单元的操作。换能器或多个换能器的位移d(t)可以由安装至探头的位移传感器直接测量。位移d(t)同样可以从控制控制振动器的命令信号推导出,由振动器引起的位移受位移传感器和控制回路(由循环控制电路实现)控制,使得其匹配该命令信号。无论如何,在此装置中,位移d(t)或至少表示位移d(t)的信号是可以容易地获得,并且无需通过对回波信号自身进行后处理来确定位移d(t)。再次,相较于上文背景技术章节介绍的后处理方法,此举显著地降
低了计算负担。此外,在所公开的装置中,避免了与从回波信号自身估算的位移d的可能失败相关联的问题(即,上文提及的步骤a的可能失败)。在所述公开装置中,回波信号能够直接在超声定序器和超声接收器级别处在时间上彼此重新对齐(因为不再需要上文提到的复杂的后处理步骤)。因为重新对齐后的回波信号可以因此在超声接收器下游直接可用,因此连续的回波信号之间的相关性计算可以在之后通过专用电子电路(例如被适当编程的fpga)立即实现。因此,需要被传输和存储的数据量在源头上被大大地减少了,这对于实时应用而言是十分有利的。例如,一个典型的回波信号可包含5000个点,每个点2字节(对于持续时间为100μs,采样频率为50mhz的典型回波信号而言),而通过相关性分析得到的对应的应变线约包含100个点,每个点4字节。所以,直接在源头上操作的数据量缩减通常减少了25倍或更多。这种数据量缩减有益的实时应用尤其包括振动受控谐波弹性成像或者振动引导瞬时弹性成像技术,例如h.loree等人于2020年发表于超声医学与生物学(ultrasound in medicine and biology)第46卷第9期2193-2206页的论文“vibration-guided transient elastography:a novelexamination with improved guidance for liver stiffness measurement(振动引导瞬时弹性成像:具有用于肝硬度测量的改进指导的新颖检查)”中描述的技术。关于时间偏移的调整,可以注意到的是,当超声换能器(或多个超声换能器)向组织移动时,d是超声换能器相对于参考位置的位移(当换能器靠近组织移动时d为正),接着,发射的超声脉冲朝向被探查的组织部分并返回的往返行程(round-trip towards)的飞行时间缩短了2.d/v
us
的量。因此,期望减少超声脉冲的发射和对应回波信号的获取之间的延迟以作为2.d/v
us
的函数,从而在尽管换能器(或多个换能器)产生位移的情况下,仍获得与其它回波信号保持准确对齐的回波信号,如图4所示。所公开的设备所正要实现的是,通过调整发射时间偏移和/或接收时间偏移量,使得其差值作为2.d/v
us
函数而变化。更具体地说,装置的电子单元可以被配置为调整发射时间偏移和/或接收时间偏移,使得发射时间偏移和接收时间偏移的差值等于δt
o-2.d/v
us
,δto是超声脉冲的发射和响应地接收的回波信号的获取之间的恒定延迟。“等于”是指在给定精度下(因为在实践中无法实现绝对的精度)的相等,例如在20%的精度内相等(因为该精度使得能够消除大多数由位移引起的时移),或者甚至在10%的精度以内,或者更甚在5%的精度以内。所述电子单元可以进一步被配置为针对至少一些所发射的超声脉冲调整:o发射时间偏移量,使其等于δt
tx,o
+c.d/v
us
,δt
tx,o
是发射恒定延迟,o以及接收时间偏移量,使其等于δt
rx,o-(2-c).d/v
us
,δt
rx,o
是接收恒定延迟,c是一个0到2之间的恒定系数。更具体地说,c可以等于1,那么发射时间偏移等于δt
tx,o
+d/v
us
,而接收时间偏移等于δt
rx,o-d/v
us
。换言之,电子单元可以被配置为在发射时间偏移量和接收时间偏移量之间平均地分配待施加的整体时移校正(即,-2.d/v
us
)。相较于将校正仅施加在发射上(其中发射时间偏移量变化2.d/v
us
)或仅施加在接收上(接收时间偏移量变化-2.d/v
us
),这需要专用的电子元件或编程。但相对应地,它使得能够对组织随时间的变形进行最佳准确采样。实际上,为了在深度z和时间t处探测测量的位移δ,在理想情况下超声脉冲发射应延迟d/v
us
,使得尽管(多个)换能器存在位移d,所发射的脉冲仍在最初计划的时间到达待探测的位置。
相对地,如果接收的回波信号时移了-2.d/v
us
,而发射未被时移,那么,由一个或多个换能器的位移造成的回波信号的z-偏移将会被适当地减小,但最终得到的组织变形将会是在时间t-d/v
us
处的组织变形,而非在时间t处的组织变形。换言之,通过对以此方法重新对齐的回波信号进行相关性分析而得到的组织位移δ将是在真实的z深度处的组织位移,而没有位移偏移(即,具有合适的z-校正),但存在轻微的时间错误。在实践中,这种对组织变形的不完全准确的时间采样可能会在弹性图中轻微地扭曲波前。因此,期望根据d对发射和接收两者都进行时移,如上所述。在这方面,需要注意到的是,上文所述的现有技术的后处理补偿技术不允许对组织变形进行这种精确的时间采样。如已经提及的,相较于所讨论的现有技术的后处理技术,在本装置中实现的补偿技术需要更少的计算。更具体地说,其可以由在fpga中实施的超声定序器实时完成。但相对应地,上述技术需要具体的设备。实际上,超声脉冲发生器或转换器,和/或控制超声脉冲发生器或转换器的电子模块需要能够实时地对发射和/或接收进行时移,以作为可变输入信号(例如,位移信号)的函数。而且,据发明人所知,现今可商用的超声脉冲发生器或转换器以及相关的控制电子元件通常都不允许基于外部信号对发射/接收的延迟进行这样的控制:它们被设计为发送预先设定好的(在实践中,预先记录好的)固定的脉冲序列(序列有时能够非常复杂,但仍然都是预先设定的),而非作为可变输入信号的函数实时调整的序列。实现本文公开的技术因此需要开发这种特定的电子模块,这需要大量的开发工作。发射时间偏移量和/或接收时间偏移量基于在所考虑的超声脉冲的发射时间处的单个换能器或多个超声换能器的位移d而调整(以便适当地补偿由该位移造成的时移)。不过,可注意到的是,如果只是因为位移传感器和控制发射/接收时间偏移量的电子元件的非零响应时间(通常被称作“管线时间”小延迟),那么轻微的时间差是可以容忍的(所考虑的位移d可能不是超声脉冲发射时的位移)。例如,对于在时刻t发射的脉冲,为了偏移该脉冲(或偏移相应的回波信号)而考虑的位移可以是在同时刻t的位移,其精度在0.2ms内,或时间精度优于低频机械振动器引起位移的周期(或典型的变化时间)的1/30。装置的电子单元可以包括驱动/连接探头的(多个)致动器、(多个)换能器、(多个)传感器(例如放大器、脉冲发生器、开关或转换器)的电子元件。电子单元也可包括用于生成适当控制信号并用于处理所获取的信号的控制电子元件。这些控制电子元件可以包括一个或多个电子逻辑电路,包括例如微处理器、数字信号处理器(dsp)、片上系统、上述的多个、或上述的组合。举例来说,所讨论的电子逻辑电路可以是fpga(现场可编程门阵列)。上文所述的弹性成像装置也可以包括以下互补和非限制性的特征的一个或多个,它们可以单独考虑或根据所有技术上可能的组合考虑:-装置进一步包括位移传感器,位移传感器被布置为输出表示所述单个超声换能器或多个超声换能器位移的测量信号,并且其中的电子单元进一步被配置为基于所述测量信号生成发射时间偏移量和/或接收时间偏移量;-所述位移传感器是惯性传感器(例如加速度计),其被布置为使得其输出的测量信号表示所述单个超声换能器或多个超声换能器相对于惯性参照系的位移;-探头包括要被手持的探头外壳,并且所述单个超声换能器或多个超声换能器被绑定在探头外壳上而相对于探头外壳不存在运动,振动器被布置为在探头外壳内部移动质
量块,以便引起单个超声换能器或多个超声换能器朝向对象的身体的所述位移;-所述探头包括探头外壳,所述单个超声换能器或多个超声换能器相对于探头外壳是可移动的,位移传感器被布置为使得其传递的测量信号表示所述单个超声换能器或多个超声换能器相对于探头外壳的位移。可以注意到的是,当如上文所解释的基于位移d调整发射时间偏移量时,由于该位移从一个超声脉冲到另一个超声脉冲随时间变化,那么,两个连续发射的脉冲之间的持续时间(即,脉冲重复周期)也根据d随时间的变化而被修改(例如参见图9)。这说明上述补偿技术也可以通过基于d随时间的变化调整脉冲重复周期来实现。
1.本技术因此还涉及一种弹性成像装置,包括:-要被紧贴对象身体的探头,探头包括o单个超声换能器;或多个超声换能器,被布置为向待表征的组织中发射超声脉冲的探头的所有超声换能器相对于彼此静止,以及o低频振动器,低频振动器被布置成引起所述单个超声换能器或多个超声换能器朝向所述组织的位移,以及-电子单元,电子单元被配置为控制单个超声换能器或多个超声换能器发射超声脉冲序列,并被配置为获取由单个超声换能器或多个超声换能器响应于所发射的超声脉冲而接收的回波信号,以便跟踪由单个超声波换能器或多个超声波换能器在组织中所引起的弹性波如何在所述组织中行进,-所述电子单元被进一步配置为针对至少一些所发射的超声脉冲,使得将超声脉冲和下一个发射的超声脉冲分隔开的脉冲重复周期根据单个超声换能器或多个超声换能器的位移而变化:o当单个超声换能器或多个超声换能器远离所述组织移动时,脉冲重复周期相较于基准脉冲重复周期to被缩短,o当单个超声换能器或多个超声换能器朝向所述组织移动时,脉冲重复周期相较于基准脉冲重复周期to被拉长。更具体地说,脉冲重复周期可以基于v/v
us
调整,其中,v是单个超声换能器或多个超声换能器位移的速度,即位移d关于时间的导数即位移d关于时间的导数可以注意到的是,以此方式调整脉冲重复周期与基于调整发射时间偏移量作为d/v
us
的函数产生相同或基本相同的结果。事实上,以此方式调整脉冲重复周期等同于根据d的时间导数调整该发射偏移量的时间导数,而非基于d调整偏移量自身。具体地说,电子单元可以被配置为调整脉冲重复周期使其(在给定精度内,例如20%或10%的精度内)等于其产生与调整发射时间偏移量使其等于δt
tx,o
+d/v
us
基本相同的时间偏移补偿。电子单元也可以被配置为调整脉冲重复周期使其等于to×
(1+2.v/v
us
),其对应于其中要被引入的时间偏移完全是在发射时引入的情况(在接收上不存在时间偏移)。更一般地说,电子单元可以被配置为调整脉冲重复周期使其等于to×
(1+c.v/v
us
),其中,c是一个0到2之间的恒定系数。本技术该涉及一种由包括探头的装置实现的弹性成像方法,该探头具有:-单个超声换能器;或多个超声换能器,被布置为在待被表征的组织中发射超声脉冲的探头的所有超声换能器相对于彼此静止,以及-低频振动器,低频振动器被布置为引起所述超声换能器或多个超声换能器朝向所述组织的位移,该方法包括如下步骤:-控制低频振动器引起所述超声换能器或多个超声换能器朝向所述组织的位移,-控制所述超声换能器或多个超声换能器发射超声脉冲序列,并获取由超声换能器或多个超声换能器响应于所发射的超声脉冲而接收的回波信号,以便跟踪由超声波换能器或多个超声波换能器在组织中引起的弹性波如何在组织中行进,-该方法还包括,针对一个或多个发射的超声脉冲:o生成发射时间偏移量,超声脉冲的发射偏移了该发射时间偏移量,o和/或生成接收时间偏移量,响应于所发射的超声脉冲而获取的回波信号偏移了该接收时间偏移量,以便补偿由超声换能器或多个超声换能器在超声脉冲序列期间发生的位移造成的所述回波信号相对于所获取的其他回波信号的时间偏移,发射时间偏移量和/或接收时间偏移量被调整,以使得它们之间的差值作为2.d/v
us
的函数而改变,其中,d是换能器或多个换能器的位移,而v
us
是组织中超声波的速度。上述装置的不同实施方式的特征也可以被应用于本弹性成像方法。
附图说明
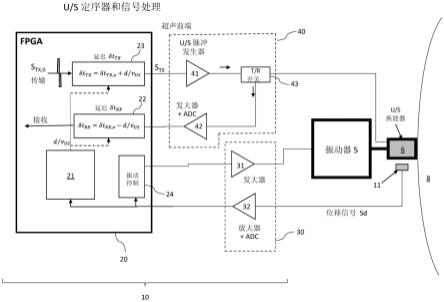
所公开的技术的其他特点和益处将从下文参照附图以示例的方式而非限制的方式给出的描述中变得显而易见,其中:图1示意性地示出了现有技术的弹性成像装置。图2示出了图1装置中的超声换能器在瞬时弹性成像测量期间的位移,以及在此测量期间用于跟踪组织如何响应于该位移进行移动而发送的超声脉冲序列。图3示意性地示出了通过图1的装置得到的弹性图。图4示意性地示出了发射和接收的时间,其在时间上被偏移以作为超声换能器位移的函数。图5示以计时图意性地示出了在典型的瞬时弹性成像测量期间超声换能器的位移和超声脉冲发射的时间。图6示意性地示出了根据第一实施方式的弹性成像装置。图7以框图示意性地示出了图6装置中的电子单元。图8示意性地示出了由图7的电子单元基于换能器位移生成的发射和接收时间偏移量。图9示意性地示出了图6的装置在典型的弹性成像的测量期间随时间发射的超声脉冲序列。图10示意性且局部地示出了根据第二实施方式的弹性成像装置。图11示意性且局部地示出了根据第三实施方式的弹性成像装置。
具体实施方式
如上文所提及的,本技术涉及振动受控弹性成像装置,即,被如下配置的弹性成像装置:通过移动与介质表面接触元件(例如探头尖端)来生成在待探索的介质中传播的弹性波,以及通过在介质中发送超声脉冲并记录响应接收的回波信号,来跟踪弹性波如何在介质中行进(或者,换句话说,介质如何被施加于其上的振动移动)。超声脉冲与相应的回波信号被一个或多个超声换能器发送和接收,一个或多个超声换能器被固定在靠近或甚至接触待探测的介质上的所讨论的移动元件上(例如被固定在探头尖端的末端处)。在弹性测量的过程中,这些超声换能器因此就像移动元件那样被移位,这导致所获取的回波信号相对于彼此的时间错位(temporal de-alignment)。本文所示的弹性成像装置被配置为补偿一个或多个超声换能器的位移,以便在时间上重新对齐所接收到的不同回波信号。为此目的,发射时间偏移量(或者,等同的,两个连续脉冲之间的脉冲重复周期),和/或接收时间偏移根据一个或多个的超声换能器的位移被实时调整(例如参见图7)。这种装置的分别由附图标记1;1’和1”标识的三个实施方式分别在图6、10、11中表示。在这三个实施方式中,设备1;1’;1”包括单个超声换能器6。此外,在其它实施方式中,弹性成像装置也可以包括多个超声换能器。但不论如何,根据本文公开的技术的装置中,被布置为在待表征的组织中发射超声脉冲的所有超声换能器相对于彼此静止。因此,它们一起移动,且它们的运动由位移d表征,位移d对于所有换能器而言是相同的。表述“组织”被理解为对象(人或者动物)身体的一部分。此表述不一定代表完整的器官或单独的器官。组织8(机械振动被传递至组织8并且组织8的变形被超声脉冲跟踪)是对象身体沿探头z轴处于设备探头附近的部分。在下文中,简写u/s表示“超声”。根据第一实施方式的装置1(图6和图7)被配置为通过根据u/s换能器6的位移d调整发射时间偏移量δt
tx
以及接收时间偏移量δt
rx
以补偿上文所述的时间偏移。根据第二实施方式的装置1’与第一实施方式中的类似,但其被配置为通过直接调整连续u/s脉冲之间的脉冲重复周期t,并且,可选地,还通过调整接收时间偏移δt
rx
,来补偿所讨论的时间偏移。在装置1和1’中,u/s换能器6相对于装置的探头2的外壳3是可移动的。并且探头包括低频振动器5,低频振动器5被布置为相对于外壳3(由操作者手持的外壳)移动u/s换能器6,从而在组织8上施加低频振动。相比之下,根据第三实施方式的装置1”,u/s换能器6绑定在外壳3上而相对于探头外壳没有运动。探头2”包括被布置成移动探头外壳3中的质量块12从而使整个探头振动的振动器5”。然而,这三个实施方式彼此相似,并且装置1;1’;1”的相同的或对应的元件通常由相同的附图标记标识。现在参考图6至图9来详细地描述第一实施方式的装置1。弹性成像装置1包括上文提及的探头2、探头外壳3、振动器5以及u/s换能器6。u/s换能器6被固定在探头的尖端4的末端,u/s换能器6被低频振动器致动(见图6)。在该装置中,振动器5围绕振动器的轴旋转对称,振动器的轴与探头的z轴重合。当
振动器振动时,其引起的位移主要是纵向的(平行于振动器的轴)。此处,振动器5被布置成移动轴件,该轴件的末端形成探头的尖端4。此轴件以z轴为中心,且振动器5被布置成沿z轴移动此轴件。振动器5是低频振动器,因为振动器5以小于500赫兹,或者甚至小于100赫兹的中心平均频率移动尖端(与中心频率通常高于1兆赫兹(例如在1兆赫兹到5兆赫兹之间)超声射束或回波信号相反)。振动器是低频机电致动器,例如具有一个或多个线圈和磁铁,类似于扩音器制动器。替代地,振动器也可以包括电动马达,例如无刷直流电机马达或者电子换向马达。这样替代方案同样很好地适用于例如振动引导的瞬时弹性成像。超声换能器6围绕换能器的轴旋转对称,且发射以该轴为中心的超声束。换能器的轴与振动器的轴重合,即与探头的z轴重合。超声换能器6具有例如圆形的区段,振动器的轴穿过该区段的中心。此区段很小,通常小于1平方厘米(其直径可小于1厘米,或小于8或甚至小于5毫米)。换能器6可由密封膜覆盖,当探头2被保持就位以进行测量时,该密封膜接触对象的身体。在实践中,由振动器5引起的超声换能器6的位移具有在0.1mm至10mm之间(例如,对于瞬时弹性成像测量方法本身而言,介于0.5至10mm之间,并且对于例如用于指导操作者的谐波振动可能更小)的峰间幅值(peak-to-peak amplitude)。在图2和图5的示例中,该振幅为2mm。所述探头2包括位移传感器11,位移传感器11被布置为输出表示超声换能器6的位移的测量信号sd。在该实施方式中,测量信号sd表示超声换能器6相对于探头外壳3的位移。位移传感器11的一部分被固定在上文提到的轴件上,而传感器的另一部分则安装在探头中而相对于外壳3没有运动。位移传感器11可以是霍尔效应传感器,感应位移传感器,包含具备不透明/透明交替区域的标尺的光学传感器,或任何其他合适的传感器。探头2被可操作地连接至中央单元7,中央单元7具备计算机结构上(并且其可以是膝上型计算机、智能手机,或者被布置以控制探头并与其交互以及处理所获取信号的专用设备)。中央单元至少包括存储器和处理器。此处,中央单元还包括用户界面,例如触摸屏幕。所述探头可以通过连接电缆9或以无线连接的方式连接到中央单元7。装置1还包括电子单元10。图7示出了该电子单元的框图。电子单元10的一些元件(例如信号调节模块32)可以被容纳在探头2中,而该单元10的其他元件可以是中央单元7的一部分。替代地,整个电子单元10可以被容纳在探头2上,或者相反地,电子单元10可以被完全整合至中央单元7中。如图7所示,电子单元10包括控制模块20、超声前端40、以及用于控制振动器5的运动控制器30。超声前端40和运动控制器30两者连接到控制模块20(即,它们可以从控制模块20接收指令或控制信号,或者向控制模块20发送数据或测量信号)。电子单元还包括用于调节和数字化位移传感器11输出的测量信号sd的信号调节模块32。此处,信号调节模块32是运动控制器30的一部分。运动控制器30还包括用于驱动振动器5的放大器31。从电学角度来看,放大器31被配置为将控制信号转换为适于驱动振动器的形式。因此,放大器31可以是例如电流放大器或功率放大器(例如德州仪器公司的lm3886功率放大器)。控制模块20是包含用于处理数据的电子电路的装置或系统,例如耦合到包括有机
器可执行指令的非易失性存储器的微处理器和/或像是fpga(现场可编程门阵列)的可编程微电路,或其他可编程微电路。控制模块20也可以包括一个或多个ram存储器或寄存器。例如,控制模块20可以是例如fpga载板的形式。控制模块20被配置为(例如,经由存储在存储器中的指令编程)控制运动控制器30,以便在弹性成像测量被触发时使轴件40移位(从而使u/s换能器6移位)。该测量可以通过操作者(例如通过按钮或者上文提及的用户界面)手动触发或者自动触发。轴件的位移根据预先设定的控制信号被控制。此处,该位移通过包括放大器31、位移传感器11、信号调节模块32以及诸如pid校正器的振动控制模块24的控制回路控制(此外,在替代的实施方式中,振动器可以通过开环控制—即没有传感器反馈)。在此处考虑的实施方式中,由振动器引起的轴件的位移是瞬时位移,例如对应于具有5ms到50ms的持续时间的一段正弦周期。超声前端40包括超声(u/s)脉冲发生器41、u/s接收器模块42和用于交替地发送和接收超声信号的开关43。所述u/s脉冲发生器41包括电子电路,该电子电路被配置为基于由控制模块20输出的传输控制信号s
tx
来生成适于驱动u/s换能器6的电超声信号。该电子电路可包括放大器和数模转换器(dac),例如每秒采样率在10到1000兆之间的8至16位dac。u/s接收器模块42包括电子电路,该电子电路被配置为获取之前由u/s换能器6接收(并且经由开关43发送至u/s接收器模块42)的电超声信号(回波信号)。超声接收器模块42的电子电路可以包括电压放大器,一个或多个滤波器和一个模数转换器(adc),例如每秒采样率在10到1000兆之间的8至16位adc。控制模块20被配置为(例如,经由存储在存储器的指令编程)控制u/s前端20,使得u/s换能器6在弹性成像测量触发时发射超声脉冲usp序列,例如图2所示的序列s。控制模块20还被配置为获取由u/s换能器响应于所发射的脉冲而接收的回波信号,从而跟踪由u/s换能器6的位移在组织8中引起的弹性波如何在组织中行进。举例来说,每个超声脉冲usp的中心频率包括例如0.5至10兆赫兹。上文提及的超声脉冲序列可以一次发送一个。两个连续脉冲之间由脉冲重复周期t分隔开。该脉冲重复周期通常在50微秒至2毫秒之间(其对应0.5千赫兹至20千赫兹之间的脉冲重复率)。上文提及的超声脉冲序列也可以被成组地发射,例如两个脉冲一组(用于计算两个对应的回波信号之间的相关性)。每组的两个脉冲可以分隔50至200微秒的持续时间,而脉冲的多组本身之间则分隔更长的持续时间,例如大于0.5ms。应当理解,在多个实施方式中也可以考虑不同的传输序列。在振动受控瞬时弹性成像的情况下(例如图2、图3和图5中),u/s脉冲序列的总持续时间可以在50ms至200ms之间。该持续时间可以取决于较慢的弹性波的传播速度以及取决于待被观测的区域的深度来选择。例如,对于80mm的深度以及1m/s的传播速度(通常是剪切波在对象肝脏中的速度),序列的持续时间可以是80ms。装置1发送的u/s脉冲序列是基于一个固定的、预先设定的参考序列,通过对序列中的每一个脉冲在时间上偏移发射时间偏移量δt
tx
来生成的,发射时间偏移量δt
tx
根据u/s换能器6的位移被实时调整。为此,控制模块20可以生成参考传输控制信号s
tx,o
(例如,基于存储在控制模块的预先设定的传输序列),当弹性成像测量触发时,该信号接下来由可控延迟器23以可控方式被延迟,从而产生发送给u/s前端40的传输控制信号s
tx
。
每个获取的回波信号都是由u/s换能器6在所述序列期间发射的多个u/s脉冲的一个的发射之后随时间t接收到的信号形成的。更准确地说,是在给定的时间窗口内(见图4)被接收的信号,该时间窗口在此发射之后为并具有给定的持续时间t
echo
。当u/s换能器6不移动时,u/s脉冲发射之间的延迟以及该时间窗口的起点是δto。例如,如果组织8(更一般地说,待表征的介质)从最小深度z
min
至最大深度z
max
被探测,则恒定延迟δto可被设置为2.z
min
/v
us
,而窗口持续时间t
echo
则被设置为2.(z
max-z
min
)/v
us
。例如,对于z
min
=20mm,z
max
=100mm(感兴趣区域roi由z=20mm延伸至80mm),δto和t
echo
分别可以被设置为27μs和107μs。由u/s换能器6响应于所发送的u/s脉冲而接收的回波信号根据u/s换能器的位移在时间上被偏移。它们偏移了接收时间偏移量δt
rx
,接收时间偏移量δt
rx
作为u/s换能器位移的函数而变化。更准确地说,对于每个回波信号,上述时间窗口的起点相对于假设换能器没有位移时最初为该脉冲计划的接收时间(换言之,接收的参考时间)偏移了δt
rx
。接收时间偏移δt
rx
可以通过可控定序器22、从由放大器和adc 42输出的数字化信号中选择合适的一系列值、利用移位寄存器或者另一种数字缓冲器而得到。在这方面,可以注意到的是,可以考虑各种方案(可能不同于上文介绍的方案)来实现发射和/或接收的这种可控延迟。具体地说,发射和/或接收时间偏移量的控制可以由u/s前端自身来实现(取决于接收的调整信号),而非由控制模块20实现。无论如何,发射时间偏移量δt
tx
和接收时间偏移量δt
rx
两者是相对于(相同的)稳定的时间参考的偏移量,例如独立于换能器位移的时钟信号。电子单元10被配置为调整发射时间偏移量δt
tx
和接收时间偏移量δt
rx
,以便补偿由超声换能器在超声脉冲发射序列期间出现的位移造成的接收的回波信号相对于其他回波信号的时间偏移。事实上,如图5所示,当换能器6在测量期间移动时,u/s换能器和位于组织内给定深度z的元件之间的距离(以及飞行时间)根据所考虑的时刻而变化。图5以计时图示意性地示出了在典型的瞬时弹性成像测量期间u/s换能器6的位移和u/s脉冲或成组(例如,成对)的脉冲发射时间。在该示例中,(成组脉冲重复频率的)脉冲重复频率是500hz,而传递给换能器的瞬时振动是持续时间为20ms,峰间幅值为2mm的一个周期的正弦波。此处,如图7和8所示,所述电子单元10更特别地被配置为:-调整发射时间偏移δt
tx
使其等于δt
tx,o
+d/v
us
,其中,δt
tx,o
是发射恒定延迟,并且-调整接收时间偏移使其等于δt
rx,o-d/v
us
,其中,δt
rx,o
是一个接收恒定延迟。此处,这两个时间偏移的差值δt=δt
rx-δt
tx
等于所发射的u/s脉冲的一个的发射和响应地记录的回波信号的起点之间的延迟δt(这些时间偏移量是相对于相同时间参考或者时钟的两个时间偏移量)。此时间差值δt接着等于δt
o-2.d/v
us
,其中δto=δt
rx,0-δt
tx,0
。发射恒定延迟δt
tx,o
可以根据换能器预期的最大位移而设定,使得δt
tx
保持为正。例如,如果预期的最大峰间位移幅值是2mm(朝向组织1mm,反向1mm),则例如δt
tx,o
可以选择为大于0.7μs的值(超声波在组织中的速度应当等于1.5mm/μs)。关于发射恒定延迟δt
rx,o
,其可被设定为使得δto=2.z
min
/v
us
。如图7所示,校正模块21从信号调节模块32输出的数字化信号中确定可变延迟d/v
us
(数字化信号代表位移传感器11输出的信号)。在此实施方式中,换能器6的位移是其相对
于探头外壳3产生的位移。校正模块21包含电子电路以确定可变延迟d/v
us
。该位移对应于换能器6相对于换能器参考位置的位移。该参考位置是例如当探头贴紧对象身体在弹性成像测量触发前一刻换能器的位置(相对于外壳的位置)。在谐波弹性成像的情况下,其也可以是换能器的平均位置。当超声换能器朝向组织(朝向对象的身体)移动时,d的值(可正可负的代数值)增加;d对应于沿着z轴指向组织的位置变化。如“发明内容”部分所述,根据u/s换能器6在发射时的位移d以此方式在时间上对发射和接收进行偏移,使得能够补偿在获取该系列回波信号期间由换能器的位移造成的回波信号之间的时间错位。得益于此延迟补偿,所记录的不同回波信号在时间上相互重新对齐。这意味着,对于不同的回波信号,在每个回波信号中,在回波信号起点之后的给定时间t处的部分对应于介质中相同的深度z(例如,对应于被介质中的相同深度z处的组织部分背向散射的信号)。电子单元10也可以被配置为:-对所记录的回波信号进行相关性分析(这些回波信号在相关性分析前已经在时间上进行了重新对齐),从而确定对于每个时间t的作为深度z的函数的组织位移(即上文“背景技术”部分提及的步骤c),以及-计算如此得到的时空位移图的z-导数(以消除由于换能器位移的非完全完美补偿而可保留的可能的残留未补偿的微小z-偏移)。在图7所示的场景中,发射时间偏移量和接收时间偏移量δt
tx
和δt
rx
被调整以分别等于δt
tx,o
+d/v
us
和δt
rx,o-d/v
us
。此外,替代地,这些时间偏移量可以不同地调整,只要它们的差值δt=δt
rx-δt
tx
作为2.d/v
us
的函数而变化。例如,补偿可以完全在发射上实现,则δt
tx
被调整使其等于δt’tx,o
+2.d/v
us
,而δt
rx
随着时间的推移保持恒定(在接收上不作调整)。相反地,补偿可以完全在接收上实现,则δt
rx
被调整使其等于δt’rx,o-2.d/v
us
,而δt
tx
随着时间的推移保持恒定(在发射上不作调整)。更一般地说,电子单元10可以被配置为:-调整发射时间偏移δt
tx
,使其等于δt
tx,o
+c.d/v
us
,以及-调整接收时间偏移,使其等于δt
rx,o-(2-c).d/v
us
,其中,c是介于0至2之间的恒定系数。上文参考图7和图8描述的情况对应于c=1。这种情况下,待施加的总体时移校正在发射时间偏移量和接收时间偏移量之间被均匀地分配。如“发明内容”部分所解释的,就组织变形的时间采样精度方面而言,这种特定的校正是最优的。图9示意性地示出了以u/s换能器6的位移为d(t)为例的由上述装置1发射的u/s脉冲的序列s(计时图b)。其还示出了在没有位移的情况下将会发射的序列so(计时图a)。在该示例中,在无延迟的参考序列so中,u/s脉冲以恒定脉冲重复频率prf0,有规律地、周期性地重复。脉冲重复周期(即,这些脉冲中的任意一个脉冲和紧接其后的一个脉冲之间的持续时间)则被记为to,且恒定。相反地,如图9可见,在装置1发射的序列中,脉冲重复周期t随时间不是恒定的。两个脉冲之间的时间间隔的这种变化是在所考虑的两个脉冲上施加发射延迟的
结果,这两个脉冲的延迟是不同的,因为第一个脉冲发射时和在第二个脉冲发射时位移d(t)的值不同。所以,如图9中所说明的,当u/s换能器6不移动时(即:当d(t)是0,或者为恒定时),那么,脉冲重复频率prf是恒定的,等于prf0。但是当u/s换能器6朝向组织移动时(当d增加时,这是图9中t1时刻至t2时刻之间的情况),那么脉冲重复频率prf小于prf0,而脉冲重复周期t高于to。相反地,当u/s换能器反向移动时(当d减小时,这是图9中0时刻至t1时刻之间以及t2时刻至t3时刻之间的情况),那么脉冲重复频率prf高于prf0,而脉冲重复周期小于to。在弹性成像装置1’的第二实施方式中,作为基于位移d对参考的、未延迟的序列so的不同脉冲进行时移的替代,直接根据位移d调整生成序列的脉冲重复周期t。是根据d的时间导数(即,根据u/s换能器位移的速度根据u/s换能器位移的速度更具体地调整脉冲重复周期t。在第二实施方式中,在图10以框图示意性地示出的装置1’的电子单元10’因此被配置为生成具有脉冲重复周期t的要被发射的脉冲序列,脉冲重复周期t根据在发射时的位移d被实时调整,使得t=to×
(1+v/v
us
)。如上文所述,to是基准参考重复周期。其等于u/s换能器不移动时两个连续的脉冲之间的持续时间。to可以随时间保持恒定,如图9所示的情况。如“发明内容”部分中所解释的,以此方式调整脉冲重复周期t与调整发射时间偏移量δt
tx
使其等于δt
tx,o
+d/v
us
(如第一实施方式的情况)产生相同或基本相同的结果。事实上,以此方式调整脉冲重复周期t等同于或基本等同于根据d的时间导数调整发射偏移δt
tx
的时间导数,而非基于d调整偏移自身。根据第二实施方式中的装置1’(装置由图10部分地示出)的不同元件和根据第一实施方式中的装置1的那些元件是相同的,或至少是相似的,除了电子单元10’关于u/s脉冲发射控制的配置不同(因为其被配置为根据调整发射脉冲重复周期,而非基于d调整每个发射时间偏移量)。更具体地说,在根据第二实施方式的装置1’中,探头2和中央单元7可与第一实施方式的装置1中那些元件相同,除了控制模块20’被不同地布置。第一实施方式的可控延迟器23被替换为了可控u/s脉冲序列生成器23’,可控u/s脉冲序列生成器23’基于u/s换能器6的位移d生成控制u/s脉冲发生器41信号。该信号被生成使得此信号内的脉冲重复周期t等于to×
(1+v/v
us
)。其他电子实现方式(可能与上文介绍的不同)可被考虑来实现这种可控脉冲重复周期生成。更具体地说,上述电子单元的不同功能在装置的元件和模块之间被不同地分布。此外,作为被配置为调整脉冲重复周期t使得其等于to×
(1+v/v
us
)的替代,电子单元10’可以被配置成:-调整t使其等于to
×
(1+c.v/v
us
),其中c是介于0至2之间的恒定系数,以及-调整接收时间偏移量δt
rx
,使其等于δt
rx,o
–
(2-c).d/v
us
。如上文关于第一实施方式所解释的,c=1的情况是待施加的总体时移校正(用于补偿u/s换能器位移)在发射和接收之间被平均分配的情况,就组织变形的时间采样精度方面而言,这种情况是最优的。
此外,其他情况也能够补偿u/s换能器的移动的大多数产生的影响。例如,补偿可以完全在发射上实现,脉冲重复周期t被调整使得其等于to
×
(1+2.v/vus),而δδt
rx
则随时间推移保持恒定(在接收上不作调整),其中对应的c=2。在上述示例中,u/s脉冲一次发送一个,在换能器无运动的情况下,两个连续脉冲之间由脉冲重复周期to分隔开。此外,上述脉冲重复周期调整技术也可以被应用于其他种类的u/s脉冲序列。例如,未延迟的、参考序列so可以由周期性重复的脉冲对(更一般地说,脉冲组)组成,其中to两个连续的脉冲对之间的周期为to,每对脉冲的两个脉冲之间的持续时间为tintra。在这种情况下,如上所述,脉冲重复周期根据d被调整,而量tintra也如to一样乘以校正系数(1+c.v/vus)。更一般地说,周期性重复所有u/s基准序列so时间模式在时间上以系数(1+c.v/vus)扩展(或减小,取决于v的正负)。图11示意性地示出了根据第三实施方式地弹性成像装置1”。如上文所述,在该实施方式中,u/s换能器6被绑定在探头外壳3上而相对于探头外壳没有运动。u/s换能器6被固定在尖端4”的末端处,尖端4”被安装至外壳3而相对外壳没有运动。所述探头2”包括质量块12,质量块12被布置为能相对于外壳沿外壳的z轴移动。尖端4”和u/s换能器以该轴为中心。振动器5”、质量块12以及u/s换能器6围绕z轴旋转对称。振动器5”被布置成相对于外壳移动质量块12(或者,换句话说,相对于惯性质量块12移动外壳3),以使得整个探头借助反冲效应朝向组织移动并返回。该惯性探头2”与桑德兰和奥蒂耶尔的第ep3315074号专利描述的探头相似。在此实施方式中,位移传感器11”是惯性传感器,其安装至探头而相对于探头没有运动,并因此相对于u/s换能器6没有运动。位移传感器11”输出的测量信号因此表示单个超声换能器6相对于惯性参考系(此参考系是与进行测量的房间或场相关联的参考系)的位移。位移传感器11”是加速度计,例如mems加速度计。在第三实施方式中,电子单元与第一实施方式中的电子单元(见图7)相同,或至少相似,除了其包括二重时间积分器,以用于将加速度信号转换为位置信号。可以注意到的是,在第三实施方式中,位移d是一种绝对位移,而在第一和第二实施方式中,位移d是一种相对位移(即,换能器相对于探头外壳的位移)。因此,在第三实施方式中,用于调整发射和/或接收时间偏移而考虑的位移d完全或者几乎完全对应于u/s换能器相对于目标身体的位移(因为在这样的检测期间对象是静止的(at rest))。在这种情况下,时移补偿因此在理论上是最优的(如果假设测量不会受到偏差和噪音的影像)。在第一和第二实施方式中,即使所考虑的位移只是相对于探头的位移,但事实证明它最终也可以得到适当的时移补偿。乍一看,这似乎很出人意料。实际上,在第一和第二实施方式中,当振动器朝向对象推动尖端时,尽管探头被紧紧握住,通常也会观察到探头的微弱反冲。因此,作为用于考虑补偿时移而被考虑的量的换能器6相对于探头外壳的位移并不完全匹配换能器相对于对象身体的位移(理想情况下,应该考虑到这一点)。针对这两种技术(通过惯性传感器测量绝对位移,或者测量相对于外壳的位移)都能得到适当的结果这一事实的解释是,在两种情况下,电子单元都被配置为计算最终得到的时空图(通过对利用上述技术重新对齐的回波信号进行相关性分析得到)的z-导数因此,即使换能器位移的补偿不是完全精确的(要么是因为上述的探头反冲,要么
是因为从由惯性传感器提供的信号推导的位移存在噪音和/或偏差),可能的残留未补偿的微小z-偏移被z-导数消除。换言之,时移补偿的主要目标实际上是消除大部分由位移引起的时移(这在第一和第三实施方式中均被实现),以避免必须计算在回波信号之间具有大的恒定偏移的回波信号的相关性(这将时耗时的,并且会增加影响结果的噪音)。从前文可知,应该理解的是,出于说明的目的,已经在本文中描述了本发明的具体实施方式,但是,除了已经提及的那些内容之外,仍然可以对上述装置做多种修改。例如,探头可以包括多个u/s换能器,而不是只有一个。在这种情况下,被布置为在待表征的组织中发射超声脉冲的探头的全部超声换能器相对于彼此静止,如已经提及的那样。这些换能器可以相对于探头z轴彼此对称地分布,使得保持探头的旋转对称性。它们也可以围绕该轴规律地分布,而不是彼此完全对称。此外,在第一和第二实施方式的情况下(换能器相对于外壳时可移动的),例如位移传感器也可以是被固定在轴件40上的惯性传感器。替代地,装置可以包括相对于外壳静止的惯性传感器和如上文所述传感器11那样的位移传感器两者(两个传感器都被使用于确定换能器相对于对象身体的位移)。在其他实施方式中,换能器的位移d(t)可以从控制振动器的命令信号推导出,而非由测量信号sd推导出。在替代实施方式中,为了补偿位移引起的时移而被考虑的换能器的位移d(t)可以通过读取存储在装置的存储器中的预先记录的位移数据得到。该位移数据可以通过获取表示换能器在典型弹性成像测量序列期间的位移的信号得到。该位移数据能够在初步测试阶段期间被获取到,装置在初步测试阶段期间被测试和表征。使用这样的预先记录数据(而不是在每次弹性成像测量被重新触发时即时测量换能器的位移)使得能够时间可靠的时移补偿,尤其是当振动器由控制回路控制时(事实上,在这种情况下,对于每次进行的所弹性成像测量,所获得的位移是相同的,或至少是相似的—这归功于控制回路—且因此,相同的预先记录的位移信号能够被使用)。上述已经就振动受控瞬时弹性成像的情况详细描述了时移补偿技术,但是其还可以被应用于振动受控谐波弹性成像中,例如,如已经公布的专利申请ep3769691中所解释的那样。值得注意的是,上文描述的多种实施方式可以根据任何技术上允许的组合所进行组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1