基于空间几何定位制作口腔导板的方法及移动装置
1.本发明属于制作口腔导板方法,尤其涉及在cbct内设计虚拟导板并将其转移到口内牙列模型中完成口腔导板制作的方法及移动装置。
背景技术:
2.导板是口腔种植导向模板的简称,是为了实现种植手术方案所设计制造的个性化手术辅助工具。目前,导板技术也逐渐应用于各个口腔诊疗领域,如引导根管预备、根尖切除术、自体牙移植术及辅助纤维桩拆除等。根据导板支持形式的不同可分为:牙支持式导板、骨支持式导板和黏膜支持式导板。
3.对于种植牙而言,因其兼顾美观性和功能性的优点,已成为临床上修复牙列缺损的首选方法,而种植体的准确植入是牙列缺损修复的关键。近年来,种植导板的出现使得医师在手术过程中可以较好的实现术前的设计方案,降低手术风险,简化手术过程,它也成为越来越多临床医师的选择。种植导板指的是口腔种植导向模版的简称,是为了实现种植手术方案所制作的个性化手术辅助工具。它采用术前患者的锥束计算机断层成像(cone beam computer tomography,cbct)数据,通过种植方案设计软件,整合cbct与患者的口内数字化模型数据,从而设计种植体的植入位置、方向及深度,避免伤及重要组织,并且同时满足以修复为导向的种植修复理念。
4.对于临床上的纤维桩拆除或钙化根管疏通,一般采用在显微镜辅助下的机械磨除,但该项技术不仅对操作者的经验和技术具有较高的要求,而且诊疗时间较久,根管壁侧穿风险高。随着“引导式牙髓治疗”概念的临床应用,推动了计算机辅助技术在牙体牙髓应用研究的开展,导板技术也逐渐被应用于纤维桩拆除或根管钙化疏通等临床操作中。使用导板拆除纤维桩或疏通钙化根管时,导环将钻针准确地保持轴线上,防止了牙体组织的过多去除、降低了根管壁侧穿的风险,使操作者在可预期的范围内实现精准、微创的治疗,从而获得良好的预后效果。相对于现有的机械磨除方式,该技术不受操作者经验的影响、临床时间短、过程简单、优化了患者的就诊体验。
5.目前,针对导板的制作方式主要有两大类,一种是计算机辅助设计/计算机辅助制作的数字化导板,该导板可应用于临床上各类牙列缺损或缺失的患者,首先收集患者术前的口内cbct影像学资料和牙列模型数据,分别导入导板设计软件,通过计算机软件将这两项数据配准,得到与患者口内情况一致的三维模型,在该模型上进行导板的设计,根据患者的口内情况设计最佳治疗方案,最终将设计方案导出为stl数据,并由3d打印机完成制作。
6.另一种传统的简易导板多应用于种植方面,对于缺牙数目少且缺牙区牙槽骨骨量较好的种植患者,根据患者的口内牙列缺损情况制取石膏模型,并在缺牙区根据现有咬合情况、邻牙及相应牙体的解剖形态雕刻蜡型,恢复牙列的完整性并翻制石膏模型,采用真空压膜机将薄膜压制在石膏模型上,修剪多余部分,在缺牙部位根据患者术前的cbct影像决定种植体的植入位置,采用打磨机在该位置钻出与导环外径相同的圆孔,将导环固定在导板上,以此完成椅旁简易种植导板的制作。但对于临床应用而言,目前这两种制作方式都存
在一定的不足。首先,数字化导板的制作方式虽然能够较好的将软件设计方案应用在手术中,实现相对精准的治疗,但该制作过程从设计、加工到制作需要经过较多的环节,每个环节都存在着一定的误差,误差逐渐积累最终影响导板的准确度,并且该制作需要耗费较长的时间且费用昂贵,需要3d打印机等较为高端的设备,对于条件有限的区域可能无法实现,在应用过程中,此方法制作的导板本身的厚度较大(一般在6-7mm左右),需要患者具有较大的张口度,而且在后牙区空间更加狭小,该厚度一定程度上限制了导板在后牙区的应用。
7.传统的简易种植导板虽然能够满足医师对于椅旁即刻种植导板的需求,但其无法将cbct影像和患者口内模型进行更好的整合,仅凭借制作者的经验进行种植位点及方向的确定,可能无法实现精准牙科种植理念,并且该种制作方式仅能应用于缺牙数目少且缺牙区牙槽骨骨量较好的患者。
8.本技术人长期致力于口腔种植临床研究,并有申请号为202010081673“一种基于四面体定位制作种植导板方法”,该方法的制作步骤如下:1)制作数字模型,确定四面体数字模型;2)测量各点间距离,利用四面体定位技术,将cbct上的种植设计数字模型转移到牙列模型上,制作种植导板。具体的是:制作数字模型,确定四面体数字模型;患者初诊拍摄cbct影像并制取待种植牙列印模;将cbct数据进行分析,模拟种植设计;由医生根据cbct数据定出种植牙的种植点p1,在cbct的牙列模型上选择两个明确的点作为四面体的顶点p3、p4,确定种植体方向,以p1为射线的端点,沿植体方向作射线,向牙合方延长,在与p1距离为40
±
5mm取点p2,形成四面体的四个顶点。测量各点间距离,利用四面体定位技术,使用本发明将cbct上的种植设计数字模型转移到牙列模型上,制作种植导板。
9.医生在拍摄cbct影像后,根据cbct影像显示的缺牙部位的解剖情况,如牙槽骨的宽度和高度、血管、神经管等来确定p1及p1p2的方向(即种植体方向),在数字模型中确定了四点后,要将p1-p4的四个点移动到牙列模型上,制作种植导板,由于p3、p4是牙列模型上的点,这项技术的关键在于确定p1点的位置和直线p1p2与牙槽骨的空间角度,它的移动方法是“在牙列模型找到数字模型中p3、p4对应点,取分规分别以p3、p4为圆心,以p3-p1、p4-p1的距离为半径,在拟种植牙位处画圆弧”其原理图如图1所示,5是导柱,6是导环。
10.该四面体定位技术主要采用的是空间中两点之间的距离并通过三个顶针之间的距离和导柱的长度进行模型设计转移。该种植导板制作方法在临床应用过程中,由于口腔牙列模型上的标志点p3、p4较为崎岖不平整,而分规的尖端在与标志点相接触时,因缺乏一定的固定设备,导致该制作装置在定位的过程中,尖端的稳定性不足,易产生部分偏移,从而影响最终导板的准确性。p2的确定“取两个分规分别以p3、p4为圆心,以p3-p2、p4-p2的距离为半径,分规的另一针脚同时处于导柱大端的圆心处,确定导柱的方向”在制作过程中使用的是2把分规,并且需2人配合操作,其中一人双手各把持一把圆规,另一人制作导板,其中一个支点两个圆规要同时使用,容易产生干涉,麻烦且不够稳定,影响导板的精度。
11.同时还检索出“基于四面体定位制作口腔种植导板的定位装置”2020207800206,其结构如图2所示,包括1固定柱、2支脚、21顶针、22鹅颈管,且鹅颈管可自由弯折的特性来满足不同牙、不同支点的需要。但经过临床实践发现:该装置主要是通过使用鹅颈管作为定位器,由于鹅颈管上缺乏一定的固位设备,在模型上定位或指示方向时,存在稳定性不够理想的缺点。
技术实现要素:
12.本发明的目的在于克服现有口腔导板制作过程中存在的不足,提供一种无需专用设备,简单易行,材料易得,治疗质量优于自由手操作的基于空间几何定位制作口腔导板方法。
13.本发明所采用的技术方案为一种基于空间几何定位制作口腔导板方法,其要点在于:它的制作步骤如下:1)制取口内牙列模型;2)拍摄口腔局部cbct;3)根据cbct影像显示的缺牙部位的解剖情况、纤维桩位置及长度或钙化根管影像学情况,在cbct影像上完成虚拟导板的设计;4)通过以点到平面的距离原理设计的转移装置将虚拟导板设计转移到患者的口内模型上。
14.所述的虚拟导板是指:种植导板、纤维桩拆除导板或钙化根管疏通导板。
15.所述的种植导板的具体制作步骤如下:a:确定种植位点标记为m1并根据影像学上显示的牙槽骨的高度及宽度确定治疗中种植体的植入深度;b:确定种植方向,取种植方向上任意一点标记为m2,种植方向为直线m1m2;c:以患牙所在牙颌上任意两点清晰可见的解剖标志的点隙、窝、牙尖顶点作为标志点m3、m4;d:取过m2点并垂直于直线m1m2的平面为标记平面;e:根据点到平面的距离公式,将cbct所提供的m3、m4标志点的三维坐标位置代入计算公式中,计算两个标志点到标记平面的距离,以此距离做为将虚拟设计转移到具体制作过程的介质;f:通过两个标志点到标记平面的距离结合转移装置将cbct内的虚拟导板设计转移到步骤1中所制取的口内牙列模型上完成导板制作。
16.所述的纤维桩拆除导板或钙化根管疏通导板的具体制作步骤如下:a:确定纤维桩的位置或钙化根管的开髓孔标记为m1并在影像上确定纤维桩或根管的长度,确定治疗的深度;b:确定纤维桩或根管的方向,取该方向上任意一点标记为m2,纤维桩或根管的总体方向为直线m1m2;c:以患牙所在牙颌上任意两点清晰可见的解剖标志的点隙、窝、牙尖顶点作为标志点m3、m4;d:取过m2点并垂直于直线m1m2的平面为标记平面;e:根据点到平面的距离公式,将cbct所提供的m3、m4标志点的三维坐标位置代入计算公式中,计算两个标志点到标记平面的距离,以此距离做为将虚拟设计转移到具体制作过程的介质;f:通过两个标志点到标记平面的距离结合转移装置将cbct内的虚拟导板设计转移到步骤1中所制取的口内牙列模型上完成导板制作。
17.e:所说的计算公式为:直线点法式:过垂直直线的平面点法式:
以此距离作为将虚拟设计转移到具体制作过程的介质;4)通过两个标志点到标记平面的距离结合特定装置将cbct内的虚拟导板设计转移到步骤1中所制取的口内牙列模型上完成导板制作并应用于临床治疗。
18.本发明创造性地使用空间几何定位技术,m3、m4标志点与m1、m2之间的位置确定也由之前的点到点的直线距离变成点到面的距离,使得操作者的活动空间增大,降低操作难度,提高精度。
19.由于各人的口腔情况不同,步骤3的c点所述的以患者牙列缺损所在牙颌上任意两点清晰可见的解剖标志的点隙、窝、牙尖顶点作为标志点m3、m4,若是无牙颌患者或缺牙数目较多的患者,可以采用黏膜上的生理性标志点,如系带、黏膜。
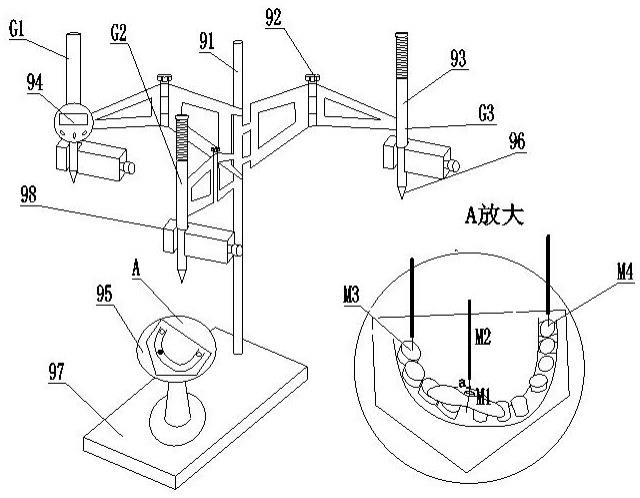
20.为了将上述cbct内的虚拟导板移动到口内牙列模型,特设计了一种用于cbct内的虚拟导板到口内牙列模型的转移装置,其要点在于:它由底座、操作平台、垂直杆及与其相连接的三个标记杆构成,三个标记杆的末端固定有定位顶针,操作平台通过一个球形关节连接底座,可进行各个方向的转动,操作平台用于放置口内牙列模型,垂直杆垂直固定于底座上,三个标记杆与垂直杆之间可进行水平向和垂直向移动,并具有固定装置。
21.口腔导板移动所要解决的是两个重要问题,一为点m1的确定,另一个为方向m1m2的确定,通常都是以口内牙列模型水平放置操作平台,而使m1m2按设计的倾角进行摆动,本发明创造性地将m1m2保持垂直,而将放置口内牙列模型的操作平台进行转动而体现二者间的角度关系,使得所有的杆都为垂直,杆与杆之间的距离容易确定,即标记杆进行距离位置确定,而操作平台的转动确定方向。空间几何定位技术是根据空间中任意一点到平面之间的距离进行技术实现的,标记杆始终垂直于水平面,调整操作平台的倾斜方向,将模型设计中标志点的坐标位置进行点到平面距离公式换算后,通过始终垂直于水平面的标记杆上的测量尺调整顶针的长度,并随之调整操作平台的倾斜角度,从而实现设计方案的转移。
22.三个标记杆上设有测量尺,用以测量距离,分别用于转移m3、m4与标记平面之间的距离到口内模型上,定位顶针的尖点分别与m1、m3、m4相对应,在定位顶针处设有固位装置。
23.定位顶针的固定尖直径为0.2-0.5mm。
24.三个标记杆为活动两节构成,中间用水平关节连接,水平关节处设置有固位螺丝。本发明通过标记杆与垂直杆之间的转动及标记杆中间的水平关节弯折实现标记杆之间的位置距离的确定,调整好后通过固位螺丝固定,使操作人员能双手继续调整另一个标记杆的位置,相互间不干涉,定位精确。
25.标记杆的末端的定位顶针具有固位装置。该结构进一步保证调整后的定位顶针位置稳定,以克服现有分规尖端的稳定性不足,易产生部分偏移的缺点。
26.本发明的优点在于空间几何定位技术是根据空间中任意一点到平面之间的距离进行技术实现的,本发明创造性地将方向的确定由操作平台的转动完成,调整操作平台的倾斜方向,标记杆始终垂直于水平面,将模型设计中标志点的坐标位置进行点到平面距离公式换算后,通过始终垂直于水平面的标记杆上的测量尺调整顶针的长度,并随之调整操作平台的倾斜角度,从而实现设计方案的转移,整个调整过程简单易行,精度高。该种导板的制作方式及装置能够将导板设计软件上的方案通过简易的装置转移到导板的制作过程中,操作简便、材料易得、能够有效满足临床上的导板的应用需求,且具有较好的应用前景。
附图说明
27.图1为一种基于四面体定位制作种植导板方法的原理示意图图2为基于四面体定位制作口腔种植导板的定位装置的结构示意图图3为实施例1(即刻种植,种植位点上仍有残根)的cbct影像设计图图4为图3的侧视图图5为本发明的转移装置实施例1的示意图图6为实施例1制作导板的示意图图7为实施例1制作完成后的导板示意图图8为实施例2的cbct影像图9为实施例2的根管cbct影像设计图图10为利用本发明的转移装置确定实施例2根管钙化疏通导板的m1m2示意图图11为制作实施例2根管钙化疏通导板的示意图图12为实施例2制作完成后的导板示意图图13为实施例2制作完成后的导板使用状态图其中:1固定柱、2支脚、21顶针、22鹅颈管、5导柱,6导环、91垂直杆、92水平关节、93标记杆、94测量尺、95操作平台、96定位顶针、97底座、98固位螺丝、99导板。
具体实施方式
28.下面结合视图对本发明进行详细的描述,以使本专业的技术人员更理解本发明。
29.实施例1,一种基于空间几何定位制作口腔导板方法:1)制取口内牙列模型:采用印模材料制取患者牙列模型用于导板的制作;2)拍摄口腔局部cbct(如图3、4所示为22牙(仅剩残根)的cbct以及设计好的m1-m4点;3)cbct可呈现患者口内的三维图像,有利于医师对牙列缺损情况进行虚拟导板的设计,在该影像软件上可显示三维图像及预定种植上任一点的坐标位置:1、取种植位点的三维坐标位置,2、取预定方向(通过位点m1的一条直线)上任意一点m2的三位坐标位置,3、取患牙所在牙颌上任意两点清晰可见的解剖标志的点隙、窝、牙尖顶点(最好与患牙部位可形成平面关系)作为标记点m3、m4(如图3),调整模型的位置,使预定方向垂直于水平面后取标记点m3、m4的三维坐标位置,通过点到平面的距离公式计算标记点m3、m4到平面(通过m2并与方向相垂直的水平面)的距离:计算公式:位点m1,方向上任一点m2,标记点m3、m4,
直线点法式:过垂直直线的平面点法式:4)通过点到平面的距离结合的转移装置将虚拟导板设计转移到患者的口内模型上。
30.如图5所示,是本发明所设计的一种基于空间几何定位制作口腔导板的移动装置,它由垂直杆91、标记杆93、操作平台95、底座97构成,在垂直杆上连接有三个用于定位的标记杆,这三个标记杆(分别称为g1、g2、g3)平行于垂直杆,并可进行水平方向上的移动,通过水平关节92进行定位,标记杆末端上设有测量尺94(图中只画出一个,为简化图示,其余未画出),用以测量距离,并且标记杆的末端上设有定位顶针96,操作平台95用于在导板制作过程中放置患者的口内牙列模型,通过球形关节(在操作平台的下方,图中未画出)连接在底座7上,可进行各个方向的转动,设有固位螺丝98用以固位。
31.利用上述移动装置将在cbct中所完成虚拟导板的设计移动到牙列模型的方法:将牙列模型放置在操作平台上并固定,根据上述计算所得的数据,移动带有测量尺的标记杆g2、g3按照m3m3’和m4m4’的距离大小定位于标记点m3、m4,在标记过程中根据距离的不同调整模型的倾斜方向,固定好g2、g3标记杆,随后将g1标记杆放置在种植位点或患牙位置m1上,此时标记杆g1的方向和指示位置即为种植植入、纤维桩拆除或钙化根管通路的方向和位点,将导环6穿入标记杆g1上,利用光固化暂时冠树脂将导环固定在邻牙上,形成导板99(如图7),本发明导板的厚度仅为3
±
1mm。治疗时将此导板固定在患者的患区邻牙上就位,钻头由导环确定位点和方向,进行临床治疗。
32.实施例2,如图8-13所示的是临床上运用本方法完成的23牙根管钙化疏通导板的制作及临床运用流程:a:拍摄口腔局部cbct确定钙化根管的开髓孔标记为m1并在影像上确定根管的长度,确定治疗的深度(根管总长:19mm,上方直线通路:12mm),图8,9;b:确定根管的方向,取该方向上任意一点标记为m2,根管的总体方向为直线m1m2;c:以患牙所在牙颌上
任意两点清晰可见的解剖标志的点隙、窝、牙尖顶点作为标志点m3、m4;d:取过m2点并垂直于直线m1m2的平面为标记平面;e:根据点到平面的距离公式,将cbct所提供的m3、m4标志点的三维坐标位置代入计算公式中,计算两个标志点到标记平面的距离,以此距离做为将虚拟设计转移到具体制作过程的介质;其中m1、m2、m3、m4的坐标位置分别为:m1(61.5,33.28,38.54);m2(62.7,29.28,13.41);m3(53.86,53.81,41.99);m4(99.06,51.35,41.40),代入公式如下:公式如下:直线点法式:过垂直直线的平面点法式:计算所得m3、m4两个标志点到标记平面的距离分别为:6.99和3.89。以此距离做为将虚拟设计转移到具体制作过程的介质;f通过两个标志点到标记平面的距离结合转移装置将cbct内的虚拟导板设计转移到步骤1中所制取的口内牙列模型上完成导板制作并应用于临床治疗。
33.使用时先将模型固定在操作平台上,根据m3、m4两个标志点到标记平面的距离:6.99和3.89,通过测量尺94定位将标记杆g2、g3放置在对应的标志点m3、m4处并固定,在此过程中旋转操作平台,移动标记杆g1至m1点,固定标记杆g1,套上导环6,利用光固化暂时冠树脂将导环固定在邻牙上,完成后,取下带有粘结体的导环,形成导板。此时导板带有与邻牙的连接信息,使导环可以确定m1的位置,导环带有角度,用以确定m1m2的角度,使用时将导板固位在邻牙上。
34.其余未述的部分与现有技术相同。
35.以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改进与等同替换,均落入本发明保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1