一种人体穴位可视定位系统
1.本发明涉及中医医学技术领域,特别涉及一种人体穴位可视定位系统。
背景技术:
2.中医针灸传承数千年,针灸医者大多以传统人工操作方法为病人治疗,为保证疗效,穴位定位的准确性尤为关键。随着中医针灸被大众认可,甚至被世界肯定,很多普通大众也对针灸颇感兴趣,却难以学习、掌握、操作。现代科技飞速发展,传统针灸与现代科技结合其势必然。目前也有一些针灸的智能设备,终究因为智能取穴欠准确治疗效果差、器械体积偏大重量偏重而操作不便、设备昂贵等原因无法推广。
3.如何实现对穴位的精准定位和对设备的微型化成为了亟待解决的技术难题。
技术实现要素:
4.本发明的主要目的是提供人体穴位可视定位系统,旨在实现对穴位的精准定位和对设备的微型化。
5.为了实现上述目的,本发明提出一种人体穴位可视定位系统,包括:
6.定位测距装置,贴合于目标人员的第一原点穴位上,用于标记第一原点穴位;
7.体态扫描装置,用于获取目标人员的立体体型参数,同时将所述第一原点穴位标记于所述立体体型参数上以生成原点体型参数;
8.处理模块,所述处理模块存储有标准体型的所有穴位参数,所述处理模块获取所述原点体型参数,将原点体型参数上的第一原点穴位与所有穴位参数中和所述第一原点穴位相对应的第二原点穴位重叠后,计算标准体型与立体体型参数之间的比例尺,并根据计算的比例尺将标准人体上的所有穴位参数映射至立体体型参数上以获得目标人员的所有穴位数据,计算确定目标人员的所有穴位数据与第一原点穴位之间的距离和方向,并将计算的距离和方向存储于定位测距装置中;以及
9.可视定位装置,通信连接于所述定位测距装置并实时计算所述可视定位装置与所述定位测距装置件的距离和方位,当所述可视定位装置与定位测距装置之间的距离和方位等于任意一个穴位距离定位测距装置的距离和方位时,所述可视定位装置上显示该穴位的名称。
10.在本技术的一实施例中,当所述可视定位装置与定位测距装置之间的距离和方位等于任意一个穴位距离定位测距装置的距离和方位时,所述可视定位装置显示该穴位的肌理结构。
11.在本技术的一实施例中,所述定位测距装置包括:
12.用于标记第一原点穴位的定位测距件;和
13.用于将定位测距装置固定于目标人员的固定组件。
14.在本技术的一实施例中,所述固定组件包括:
15.第一连接件,第一连接件的固定端连接在定位测距装置上;
16.第二连接件,第二连接件的固定端连接在定位测距装置上;
17.第一扣紧件,连接在所述第一连接件的自由端上;以及
18.第二扣紧件,连接在所述第二连接件的自由端上,第一扣紧上设有扣接通孔,所述第二扣紧件上设有与所述扣接通孔相配合以实现第一扣紧件和第二扣紧件紧固连接的凸起。
19.在本技术的一实施例中,所述第一扣紧件和第二扣紧件上设有分别设有相互配合的磁铁。
20.在本技术的一实施例中,还包括可向处理模块输入目标人员特异性尺寸数据和/或待定穴位的输入模块。
21.在本技术的一实施例中,所述体态扫描装置包括:
22.距离成像传感器,用于扫描目标人员;
23.第一驱动组件,用于驱动所述距离成像传感器上下运动以实现所述距离成像传感器获取目标人员高度上的立体体型参数;以及
24.第二驱动组件,用于驱动目标人员转动;其中,
25.当所述第一驱动组件驱动所述距离成像传感器完成目标人员高度上的立体体型参数采集后,所述第二驱动组件驱动所述目标人员转动预设角度以使所述距离成像传感器获取目标人员不同位置的立体体型参数。
26.在本技术的一实施例中,所述可视定位装置包括:
27.显示模块,用于显示穴位的名称和肌理结构。
28.在本技术的一实施例中,所述可视定位装置还包括:
29.语音模块,用于朗读穴位的名称和肌理结构信息。
30.采用上述技术方案,先通过在目标人员上定位第一原点穴位,然后计算目标人员与标准人体之间的比例尺,该比例尺包括水平方向的比例尺和竖直方向上的比例尺,然后做穴位映射。将完成映射的立体体型数据存储在定位测距装置上,然后通过可视定位装置实现人体穴位的显示,从而方便使用人员进行穴位定位,结构简单,便于实施。
附图说明
31.下面结合具体实施例和附图对本发明进行详细的说明,其中:
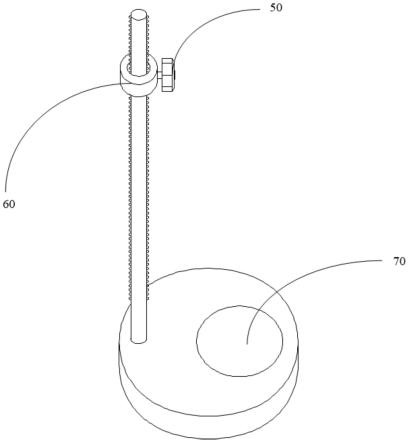
32.图1为本发明体态扫描装置的结构示意图。
33.图2为本发明定位测距装置的结构示意图。
34.图3为本发明可视定位装置的结构示意图。
具体实施方式
35.为了使本发明的目的、技术方案及优点更加清楚,以下结合附图和实施例对本发明进行详细的说明。应当理解,以下具体实施例仅用以解释本发明,并不对本发明构成限制。
36.如图1至图3所示,为了实现上述目的,本发明提出一种人体穴位可视定位系统,包括:
37.定位测距装置10,贴合于目标人员的第一原点穴位上,用于标记第一原点穴位;
38.体态扫描装置,用于获取目标人员的立体体型参数,同时将所述第一原点穴位标记于所述立体体型参数上以生成原点体型参数;
39.处理模块,所述处理模块存储有标准体型的所有穴位参数,所述处理模块获取所述原点体型参数,将原点体型参数上的第一原点穴位与所有穴位参数中和所述第一原点穴位相对应的第二原点穴位重叠后,计算标准体型与立体体型参数之间的比例尺,并根据计算的比例尺将标准人体上的所有穴位参数映射至立体体型参数上以获得目标人员的所有穴位数据,计算确定目标人员的所有穴位数据与第一原点穴位之间的距离和方向,并将计算的距离和方向存储于定位测距装置10中;以及
40.可视定位装置20,通信连接于所述定位测距装置10并实时计算所述可视定位装置20与所述定位测距装置10件的距离和方位,当所述可视定位装置20与定位测距装置10之间的距离和方位等于任意一个穴位距离定位测距装置10的距离和方位时,所述可视定位装置20上显示该穴位的名称。
41.具体的,一种人体穴位可视定位系统,包括定位测距装置10、体态扫描装置、处理模块、以及可视定位装置20。
42.按照中华人民共和国国家标准gb/t 12346-2021,该文件规定了人体腧穴体表定位的方法和362个经穴的名称与定位,人体穴位的分布具有一定的规律,几个标志位将人体背部俞线上的穴位分成了几个区域,在这几个区域内的穴位是均匀分布的。根据国家标准的规定,几个标志位位置的确定如下:人体大椎穴位于后正中线上,第七颈椎棘突下凹陷中;肺俞穴位于第三胸椎棘突下,旁开1.5寸俞线上;人体膈腧穴位于第七胸椎棘突下,旁开1.5寸俞线上;胆俞穴位于第十胸椎棘突下,旁开1.5寸;肾俞穴位于第二腰椎棘突下,旁开1.5寸俞线上。
43.根据穴位分布均匀的特点,可以将对应的穴位标注在标准人体上后,形成电子穴位图。
44.定位测距装置10,包括圆形外壳,圆形外壳采用塑料材料制成,采用塑料材料制成的圆形外壳具有重量轻、成本体、容易制作等优点。当然根据设计的需要,圆形外壳还可以采用金属材料制成,例如铝合金材料、合金钢材料等等。采用金属材料制成的圆形外壳具有支撑能力强,耐磨损等优点。由于定位测距装置10需要发送电子信号,当圆形外壳采用金属材料制成时,为避免其形成电场屏蔽,需要在圆形外壳上开设供信号传输的通孔或者将通信天线外置。
45.圆形外壳内安装有信号发射件,该信号发射件可不间断向外发射电磁脉冲信号,以实现数据传输和原点标注。即以该信号发射件为第一原点穴位的基准位置。根据国标gb/t 12346-2021中的有关描述,人体的大椎穴、肺俞穴等等为便于识别和定位的穴位,其位置比较特殊,方便人们定位。
46.定位测距装置10在实现第一原点穴位标注时,通过人为识别和定位方式,将定位测距装置10放置在穴位上,并将该穴位作为第一原点穴位。
47.为了便于描述,本技术中将大椎穴作为第一原点穴位进行描述。
48.定位测距装置10贴合在大椎穴上,将大椎穴作为第一原点穴位进行标记。
49.体态扫描装置,其主要用于扫描人体的立体数据,建立人体立体模型。体态扫描装置的类型包括声波体态扫描、光学体态扫描等等。
50.当体态扫描装置为声波体态扫描时,体态扫描装置包括声波发射件和声波接收件。其工作原理为,声波发射件持续向目标人体发送声波,此时声波接收件接收声波发射件的回波,通过接收回波的时间来确定声波发射件与人体之间的距离,然后通过动力件移动声波发射件和声波接收件,实现对目标人体不同方向的检测,然后根据距离参数绘制目标人员的立体体型参数并根据该立体体型参数构建出目标人员的立体身体模型。
51.当体态扫描装置为光学体态扫描时,体态扫描装置包括红外检测件和距离检测件。其工作原理为,红外检测件获取目标人员的红外图像数据、距离检测件获取目标人员各个部位的距离数据,获取完成后,关联目标人员各个部位的距离数据与红外数据,并基于距离数据对红外图像数据进行景深增强获得图像视差数据,然后基于图像视差数据获得目标人员红外立体图像数据。
52.在体态扫描装置获取完成目标人员的立体体型参数后,体态扫描装置获取定位测距装置10的第一原点穴位,并将第一原点穴位标注在立体体型参数上上,生成原点体型参数。本技术中的原点体型参数是指含有第一原点位置数据的目标人员立体体型数据,该立体体型数据为与人体尺寸为1:1的人体立体模型。
53.根据穴位分布均匀的特点,将穴位标注在标准人体上后形成电子穴位图,处理模块中存储有该电子穴位图。处理模块获取体态扫描装置获得的原点体型参数,将电子穴位图中的大椎穴与原点体型参数中的大椎穴进行重叠后,处理模块计算目标人员与标准人体之间的体型比例尺,该比例尺包含水平方向上的比例尺和竖直方向上的比例尺,然后根据获取的体型比例尺将标准人体上的所有穴位参数已映射到目标人员的原点体型参数上。该映射过程为距离说明如下:标准人体与目标人员的原点体型参数水平方向的比例尺的计算结果为1:1.25;则对应将标准人体穴位上各个穴位与第一原点穴位的距离延长1.25倍。同理,将标准人体穴位上的各个穴位与第一原点穴位的距离参照竖直比例尺进行延长,以实现穴位的映射。
54.在处理模块完成所有的穴位在目标人员的原点体型参数上映射之后,将映射完成的数据存储于定位测距装置10。
55.可视定位装置20与定位测距装置10实时通信,定位测距装置10实时计算可视定位装置20与自身的距离和方位,当可视定位装置20与自身的距离和方位与存储在其内部的穴位与到自身的距离相等且方位一直时,可视定位装置20上显示该穴位名称。
56.采用上述技术方案,先通过在目标人员上定位第一原点穴位,然后计算目标人员与标准人体之间的比例尺,该比例尺包括水平方向的比例尺和竖直方向上的比例尺,然后做穴位映射。将完成映射的立体体型数据存储在定位测距装置10上,然后通过可视定位装置20实现人体穴位的显示,从而方便使用人员进行穴位定位,结构简单,便于实施。
57.可以想到的是,为了提高标准人体穴位的准确性,可以通过采集目标人员的立体体型参数,然后根据立体体型参数构建体型模型,然后通过采集的目标人员的立体体型参数对该模型进行训练,从而使的标准人体更加贴近目标人员的体型。提高穴位定位的准确性,由于其为现有技术,在此不再一一赘述。
58.在本技术的一实施例中,当所述可视定位装置20与定位测距装置10之间的距离和方位等于任意一个穴位距离定位测距装置10的距离和方位时,所述可视定位装置20显示该穴位的肌理结构。
59.具体的,当可视定位装置20与定位测距装置10件的距离和方位等于任意一个穴位距离定位测距装置10的距离和方位时,表示可视定位装置20已经处于某一具体穴位上,此时可视定位显示装置显示该穴位的肌理结构,通过显示该穴位的肌理结构,可方便使用人员教学使用,同时也方便目标人员掌握该穴位的结构和深度。
60.采用上述技术方案,结构简单,便于实施。
61.在本技术的一实施例中,所述定位测距装置10包括:
62.用于标记第一原点穴位的定位测距件;和
63.用于将定位测距装置10固定于目标人员的固定组件。
64.具体的,定位测距装置10包括用于标记第一原点穴位的定位测距件,本技术中的定位测距件可以为信号发射件,信号发射件可不间断的向外发射电磁脉冲信号,以实现数据传输和第一原点穴位的标注。信号发射件带有圆形外壳。圆形外壳所使用的材料在上文已经描述,再此不在一一限定。
65.固定组件用于将定位测距件固定在目标人员身体上。该固定组件可以为不干胶、松紧带、或者卡扣件。
66.当固定组件为不干胶时,不干胶设置在圆形外壳上,通过不干胶粘贴在目标人员的皮肤上,实现第一原点穴位的标注。
67.当固定组件为松紧带时,松紧带的两端分别连接圆形外壳上,通过松紧带将圆形外壳固定目标人员的皮肤上。
68.采用上述技术方案,通过设置固定组件实现对定位测距件的固定,结构简单,便于实施。
69.在本技术的一实施例中,所述固定组件包括:
70.第一连接件11,第一连接件11的固定端连接在定位测距装置10上;
71.第二连接件12,第二连接件12的固定端连接在定位测距装置10上;
72.第一扣紧件13,连接在所述第一连接件11的自由端上;以及
73.第二扣紧件14,连接在所述第二连接件12的自由端上,第一扣紧上设有扣接通孔,所述第二扣紧件14上设有与所述扣接通孔相配合以实现第一扣紧件13和第二扣紧件14紧固连接的凸起。
74.具体的,固定组件包括第一连接件11、第二连接件12、第一扣紧件13、以及第二扣紧件14。
75.第一连接件11和第二连接件12均为皮带,第一连接件11的固定端连接在定位测距装置10上,第二连接件12的固定端连接在定位测距装置10上。
76.第一扣紧件13连接在第一连接件11的自由端上,第二扣紧件14连接在第二连接件12的自由端上。通过第一扣紧件13和第二扣紧件14的相互配合,将定位测距装置10固定在目标人员身上。
77.采用上述技术方案,结构简单,便于实施。
78.在本技术的一实施例中,所述第一扣紧件13和第二扣紧件14上设有分别设有相互配合的磁铁。
79.具体的,在第一扣紧件13和第二扣件上分别安装有相互吸引的磁铁,通过相互吸引的磁铁,通过相互吸引的磁铁,方便第一扣紧件13和第二扣件件的扣合。结构简单,便于
实施。
80.在本技术的一实施例中,还包括可向处理模块输入目标人员特异性尺寸数据和/或待定穴位的输入模块。
81.具体的,人体穴位可视定位系统,包括可向处理模块输入目标人员特异性尺寸数据和/或待定穴位的输入模块,通过输入模块实现对目标人员的特异性参数的微调,提高了对目标人员穴位定位的准确性。
82.在本技术的一实施例中,所述体态扫描装置包括:
83.距离成像传感器50,用于扫描目标人员;
84.第一驱动组件60,用于驱动所述距离成像传感器50上下运动以实现所述距离成像传感器50获取目标人员高度上的立体体型参数;以及
85.第二驱动组件70,用于驱动目标人员转动;其中,
86.当所述第一驱动组件60驱动所述距离成像传感器50完成目标人员高度上的立体体型参数采集后,所述第二驱动组件70驱动所述目标人员转动预设角度以使所述距离成像传感器50获取目标人员不同位置的立体体型参数。
87.具体的,体态扫描装置包括:距离成像传感器50、第一驱动组件60、第二驱动组件70。
88.距离成像传感器50采用现有技术中常用的距离成像传感器50,用于获取目标人员的形体参数。
89.距离成像传感器50安装在竖直设置的导轨上,距离成像传感器50可以沿着导轨的长度方向往复运动。
90.第一驱动组件60连接在距离成像传感器50上,用于驱动距离成像传感器50沿着导轨的长度方向往复运动。
91.第二驱动件用于驱动目标人员转动。当第一驱动组件60驱动距离成像传感器50完成目标人员高度上的立体体型参数的采集以后,第二驱动组件70驱动目标人员转动预设角度,使距离成像传感器50获取目标人员不同位置的立体体型参数。最后将获取的所有的立体体型参数进行拼接,从而获取的目标人员的完整的立体体型参数。
92.采用上述技术方案,结构简单,通过简单的位置变换,即可实现目标人员的立体体型参数的采集,结构简单,便于体态扫描装置的微型化。
93.在本技术的一实施例中,所述可视定位装置20包括:
94.显示模块30,用于显示穴位的名称和肌理结构。
95.具体的,显示模块30采用现有技术中常用的液晶显示屏,当然根据设计的需要,也可以采用oled显示屏。通过显示模块30显示穴位的名称和肌理结构,方便使用者的使用。
96.在本技术的一实施例中,所述可视定位装置20还包括:
97.语音模块40,用于朗读穴位的名称和肌理结构信息。
98.语音模块40采用现有技术中常用的喇叭,采用语音提示模块提示穴位的名臣和肌理结构信息,使得使用在不观看显示装置的时候也可以进行对应穴位的定位,方便使用者的使用。结构简单,便于实施。
99.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用
在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1