一种基于裂隙灯显微镜检查仪器的电动照明臂机构的制作方法
1.本发明涉及医疗设备领域,具体涉及一种基于裂隙灯显微镜检查仪器的电动照明臂机构。
背景技术:
2.眼睛是人类感官中最重要的器官,大脑中大约有80%的知识都是通过眼睛获取的。读书认字、看图赏画、看人物、欣赏美景等都要用到眼睛。
3.裂隙灯显微镜,是眼科检查必不可是少的重要仪器,也是眼科常规检查的用途第一广泛的基础仪器,眼科诊疗及眼科保健、验光配镜等行业国家要求强制配置裂隙灯。
4.在全世界,从最小的五官科门诊到大的眼科医院再到顶级的眼科疾病研究机构,眼科裂隙灯显微镜都是检查眼睑、结膜、巩膜、角膜、前房、虹膜、瞳孔、晶状体及前1/3玻璃体,确定病变的位置、性质、大小及其深度的最专业的设备。
5.眼科裂隙灯显微镜大量的被医疗机构、眼科保健机构、眼镜连锁商店使用,仪器上的功能扩展和改进对于人类眼健康有重要的作用。
6.裂隙灯的构造主要由四部分构成:裂隙照明机构、显微镜光学体、移动平台机构、腮托机构。
7.在使用裂隙灯检查一些项目中,需要将照明臂摆动一定角度,如检查项目眼睑、眼缘及睫毛需要将照明臂摆动到左右各45度,晶状体要将照明臂摆动到左右各10~45度等。现有阶段裂隙灯摆动照明臂,采用手动摆动照明臂的方法,需要那个角度,手动摆动照明臂到那个角度。它的优点是结构简单,直接有效。缺点是精准度差,对操作者在设备操作上要有一定的技能水平要求,增加了操作者的负担。比如操作者在手动摆动照明臂到一个角度时,会对角度进行微调,以便找到最佳角度,手动操作会出现多次反复微调,增加检测时间,还可能该位置不是最佳角度。
技术实现要素:
8.本发明本专利在于解决裂隙灯显微镜检查仪器照明臂电动摆动和摆动精准度问题,兼容照明臂的手动摆动,同时为实现裂隙灯全面电动化、智能化解决了一个问题。
9.因此,提出一种基于裂隙灯显微镜检查仪器的电动照明臂机构,具体技术方案如下:
10.一种基于裂隙灯显微镜检查仪器的电动照明臂机构,其特征在于:包括升降臂、照明臂和电动驱动机构;
11.所述电动驱动机构固定在所述升降臂的连接部上,用于驱动所述照明臂摆动,实现照明臂的电动摆动。
12.进一步地,该电动照明臂机构同样能实现照明臂的手动摆动。
13.进一步地,所述电动驱动机构为电机驱动结合分离传动装置,从而带动所述结合分离传动装置连接端的照明臂摆动。
14.进一步地,所述电动驱动机构包括支架、电机、结合分离传动装置、主动齿轮和从动齿轮,该电机安装在所述支架上,所述结合分离传动装置安装在所述电机的输出端上,所述主动齿轮安装在结合分离传动装置上,所述从动齿轮安装在照明臂上。
15.进一步地,所述结合分离传动装置是通过通断电来控制传动部位的结合与分离。
16.所述结合分离传动装置通电时,传动部位结合,所述电机驱动照明臂摆动;所述结合分离传动装置断电时,传动部位分离,手动照明臂摆动。
17.所述结合分离传动装置还可以是手动控制传动部位的结合与分离。
18.进一步地,所述电动驱动机构可以是齿轮传动机构、链传动机构、带传动机构、凸轮传动机构、连杆传动机构或者蜗轮蜗杆传动机构。
19.本发明的有益效果为:第一,实现裂隙灯显微镜检查仪器的电动照明臂功能;
20.第二,电动进行控制,提高照明臂摆动角度的精准度,有利于提高检测效率。
21.第三,兼容手动照明臂功能。
22.第四,便于实现整个裂隙灯显微镜检查仪器的智能化操作和远程操作。
附图说明
23.图1为本专利结构主剖视图;
24.图2为图1中a局部放大图
25.图3为本专利结构b-b剖视图;
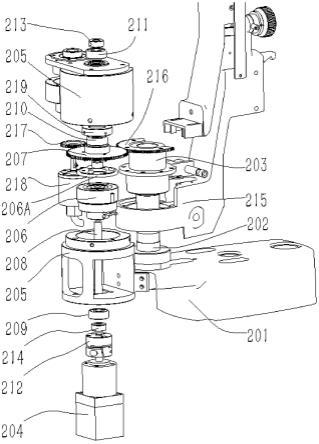
26.图4为本专利爆炸图
27.图5为本专利结构示意图;
28.图6为本专利逻辑框图;
29.图中附图说明标记为,裂隙灯腮托机构1,裂隙灯照明机构2,显微镜光学体3,裂隙灯平台移动机构4,电动照明臂机构5,升降臂201,升降臂芯轴202,旋转轴203,电机204,支架205,电磁离合器206,离合板306a,主动齿轮207,转轴208,轴承209、210、211,联轴器212,锁紧圈213、214、219,照明臂215,从动齿轮216,从动齿轮217,绝对值编码器218。
具体实施方式
30.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
31.如图1至图4所示:一种基于裂隙灯显微镜检查仪器的自动和手动照明臂机构,包括升降臂201、支架205、照明臂215、旋转轴203、升降臂芯轴202。
32.在升降臂201上方连接有升降臂芯轴202,从动齿轮211安装在旋转轴203上,旋转轴203与照明臂215连接,旋转轴203放置在升降臂芯轴202上,照明臂绕芯轴202自由转动。
33.在升降臂201侧面连接有支架205,支架205内设置有电机204,电机204输出端通过联轴器212连接有转轴208,转轴208先穿过轴承209内圈,再穿过电磁离合器206内孔,轴承209外圈固定在支架205上,通过锁紧圈214将轴承209内圈固定在转轴208上,电磁离合器206自带锁紧圈固定在转轴208上,电磁离合器206自带的离合板206a与主动齿轮207连接,电磁离合器206与离合板206a有0.1~0.15mm间隙,将轴承210外圈通过锁紧圈219固定在主动齿轮207上,转轴208再次穿过轴承210内孔,轴承210内圈固定在转轴208上,转轴208最后
穿过轴承211内孔,轴承211外圈固定在支架205上,通过锁紧圈213将轴承211内圈固定在转轴208上,则转轴208、电磁离合器206都随电机204同步转动,电磁离合器206的线圈通电时产生磁力,磁力作用在离合板206a上,此时电磁离合器206与离合板206a处于接合状态,离合板206a在磁力下随电磁离合器206转动,离合板206a连接的主动齿轮207一起转动,从而带动从动齿轮216转动,照明臂215随从动齿轮216转动,实现照明臂215的电动功能。当电磁离合器206的线圈断电时,电磁离合器206与离合板206a处于分离状态,电磁离合器206空转,主动齿轮207、从动齿轮216、照明臂215自由转动,保留原手动照明臂功能。主动齿轮207与从动齿轮217保持啮合,从动齿轮217连接有编码器218,编码器218(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。本实施案例采用的是绝对值型的编码器218就是对应一圈,每个基准的角度发出一个唯一与该角度对应二进制的数值,通过外部记圈器件可以进行多个位置的记录和测量。编码器218能实时检测主主动齿轮207与从动齿轮217的位置,从而检测照明臂215的位置。
34.主动齿轮207与从动齿轮211保持啮合状态。
35.本发明工作原理:电机的输出扭矩传递给转轴,带动转轴上的电磁离合器转动,电磁离合器通电下,在磁力作用下离合板及主动齿轮随电磁离合器一起转动,主动齿轮带动从动齿轮转动,从而驱动从动齿轮上的照明臂摆动,实现照明臂电动摆动;主动齿轮带动编码器上的另一个从动齿轮转动,通过编码器位置检测,可实时检测照明臂摆动角度,实现照明臂摆动角度控制。
36.在需要手动摆动照明臂时,电磁离合器的线圈断电,电磁离合器与离合板处于分离状态,主动齿轮与从动齿轮自由转动,可通过手动摆动照明臂,达到需要的照明臂角度,
37.在需要电动摆动照明臂时,电磁离合器的线圈通电产生磁力,在磁力作用下,电磁离合器与离合板处于接合状态,通过电机驱动与编码器控制,达到需要的照明臂角度。
38.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
39.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1