用于血管腔内介入手术机器人的无菌保护套及其装配方法与流程
本发明涉及手术机器人的,具体地,涉及一种用于血管腔内介入手术机器人的无菌保护套及其装配方法。
背景技术:
1、血管介入手术机器人能够辅助医生远程控制导管导丝进行手术,减少辐射危害,提高手术精度,缩短手术时间,已经成为医疗机器人的研究热点。
2、在血管腔内介入手术机器人领域,无菌隔离非常重要,可以避免导丝导管感染病菌,从而避免血液感染。
3、公开号为cn110200700a的中国发明专利文献公开了一种血管介入手术机器人和一种血管介入设备,机器人的导丝旋转和力反馈集成模块可以真实的测得导丝受到的轴向力和扭矩,机器人增设了可拆卸外壳。同时血管介入设备通过在血管介入机器人的基础上增设四个自由度的机械臂结构,根据手术要求调整导丝推进模块的高度、位置和稳定支持,机械臂下方配有轮子。
4、公开号为cn107049500a的中国发明专利文献公开了一种血管介入手术机器人,首先,第一机械臂末端设置有夹持机构,第二机械臂末端设置有送丝机构,第一机械臂和第二机械臂均具有至少六个自由度;其次,影像设备与监控系统电连接,医生在手术室外即可通过监控系统观察手术操作情况,以为医生提供机器人操作过程的判断;最后,第一机械臂、第二机械臂以及送丝机构也与监控系统电连接,医生在手术室外通过监控系统远程操控第一机械臂和第二机械臂协同运动,实现导丝在导管内送丝、退丝、旋转切换血管管路等手术动作。
5、公开号为cn110101454a的中国发明专利文献公开了一种血管介入手术机器人系统,包括底座、第一电机、第二电机、第一编码器以及第二编码器,所述底座上安装有一组转动支座和位于两个转动支座之间的滑动导轨,转动支座上转动安装有丝杠,其中一转动支座上安装有第一电机,第一电机上安装有第一编码器,第一电机输出端与丝杠端部驱动连接,所述滑动导轨上滑动安装有横向滑座,横向滑座上安装有支架,支架上端转动安装有转动盘,转动盘的盘体中心轴端部通过传动组件与横向滑座上的第二电机驱动连接,第二电机上安装有第二编码器。
6、针对上述中的相关技术,发明人认为上述技术中对于无菌隔离并未有具体措施,有菌部分(介入手术机器人)接触指头耗材和摆杆耗材,进而容易造成指头耗材、摆杆耗材以及指头耗材和摆杆耗材所夹持的导丝导管感染病菌,从而导致血液感染。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种用于血管腔内介入手术机器人的无菌保护套及其装配方法。
2、根据本发明提供的一种用于血管腔内介入手术机器人的无菌保护套,包括执行手保护套;
3、手术机器人包括机械臂和执行手;
4、所述机械臂连接执行手;
5、所述执行手保护套套设密封执行手;
6、所述执行手保护套入口处密封在执行手靠近机械臂的端部;
7、所述执行手保护套包裹住执行手远离机械臂的端部。
8、优选的,该无菌保护套还包括机械臂保护套;
9、所述机械臂保护套套设密封机械臂;
10、所述机械臂保护套入口处密封在机械臂远离执行手的端部;
11、所述机械臂保护套出口处和执行手保护套入口处接触密封设置。
12、优选的,所述机械臂保护套出口处和执行手保护套入口处部分重叠设置。
13、优选的,所述执行手通过执行手的横杆连接机械臂;
14、所述机械臂保护套入口、机械臂保护套出口以及执行手保护套入口均设置有第一松紧带;
15、所述机械臂保护套入口处的第一松紧带利用自身的弹性回复力绑紧在机械臂远离执行手的一端;
16、所述机械臂保护套出口处的第一松紧带利用自身的弹性回复力绑紧在执行手的横杆上;
17、所述执行手保护套入口处的第一松紧带利用自身的弹性回复力绑紧在执行手的横杆上。
18、优选的,所述机械臂保护套包括高分子薄膜。
19、优选的,所述执行手保护套上设置有多个指套;
20、所述执行手保护套和指套连通;
21、所述指套分别套设在执行手的指头上。
22、优选的,所述指套为弹性薄膜。
23、优选的,所述第一松紧带为橡胶。
24、根据本发明提供的一种用于血管腔内介入手术机器人的无菌保护套的装配方法,应用用于血管腔内介入手术机器人的无菌保护套,从执行手保护套入口,沿着执行手至机械臂的方向,将执行手保护套套设在执行手的外部,执行手保护套入口被密封套设在执行手靠近机械臂的端部。
25、优选的,该装配方法包括如下步骤:
26、机械臂保护套装配步骤:首先装配机械臂保护套,从机械臂保护套入口,沿着执行手至机械臂的方向,将机械臂保护套套设在机械臂的外部,机械臂保护套入口处的第一松紧带被套设在机械臂远离执行手的端部,机械臂保护套出口处的松紧带被套设在执行手的横杆上;
27、执行手保护套装配步骤:最后装配执行手保护套,从执行手保护套入口,沿着执行手至机械臂的方向,将执行手保护套套设在执行手的外部,执行手保护套入口处的松紧带被套设在执行手的横杆上,并包裹住机械臂保护套出口。
28、与现有技术相比,本发明具有如下的有益效果:
29、1、本发明机构在血管介入机器人领域,使用无菌保护套(机械臂保护套和执行手保护套)可以有效包裹住有菌部分(介入手术机器人),从而使无菌部分(指头耗材和摆杆耗材,以及指头耗材和摆杆耗材所夹持的导丝导管)不受污染,不易感染病菌,从而不易血液感染;
30、2、本发明机构通过在机械臂保护套的两侧和执行手保护套入口增加松紧带,大大增加了保护套的弹性变形量,以满足运动部件的大行程运动;
31、3、本发明机构执行手保护套采用弹性薄膜,弹性薄膜自身有良好的弹性,可以满足运动部件的小行程运动,无需额外增加弹性装置或材料,占用空间小,常常用在狭小空间区域;
32、4、本发明机构执行手保护套采用光滑性薄膜,光滑性薄膜自身有良好的光滑性,在接触运动过程(执行手保护套和执行手的接触)中,带来较小的摩擦阻力,保护套也不易被拉扯。
技术特征:
1.一种用于血管腔内介入手术机器人的无菌保护套,其特征在于,包括执行手保护套(2);
2.根据权利要求1所述的用于血管腔内介入手术机器人的无菌保护套,其特征在于,该无菌保护套还包括机械臂保护套(1);
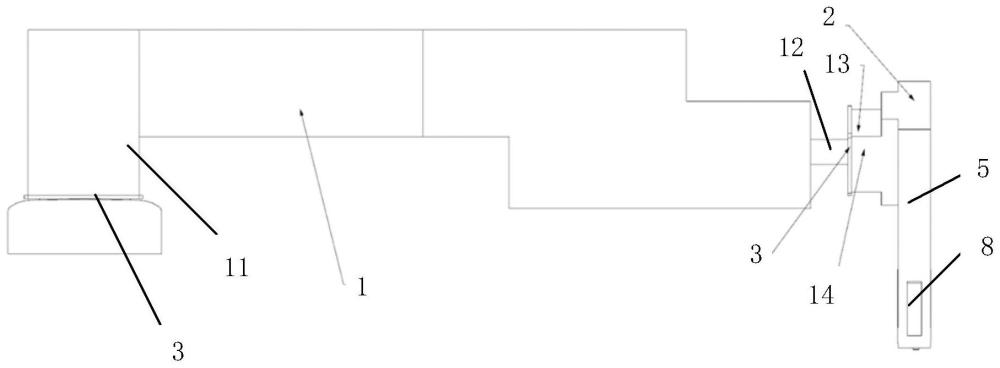
3.根据权利要求2所述的用于血管腔内介入手术机器人的无菌保护套,其特征在于,所述机械臂保护套出口(12)处和执行手保护套入口(13)处部分重叠设置。
4.根据权利要求2所述的用于血管腔内介入手术机器人的无菌保护套,其特征在于,所述执行手(10)通过执行手(10)的横杆(23)连接机械臂(9);
5.根据权利要求2所述的用于血管腔内介入手术机器人的无菌保护套,其特征在于,所述机械臂保护套(1)包括高分子薄膜。
6.根据权利要求1所述的用于血管腔内介入手术机器人的无菌保护套,其特征在于,所述执行手保护套(2)上设置有多个指套(7);
7.根据权利要求6所述的用于血管腔内介入手术机器人的无菌保护套,其特征在于,所述指套(7)为弹性薄膜。
8.根据权利要求4所述的用于血管腔内介入手术机器人的无菌保护套,其特征在于,所述第一松紧带(3)为橡胶。
9.一种用于血管腔内介入手术机器人的无菌保护套的装配方法,其特征在于,应用权利要求1-8任一所述的用于血管腔内介入手术机器人的无菌保护套,从执行手保护套入口(13),沿着执行手(10)至机械臂(9)的方向,将执行手保护套(2)套设在执行手(10)的外部,执行手保护套入口(13)被密封套设在执行手(10)靠近机械臂(9)的端部。
10.根据权利要求9所述的用于血管腔内介入手术机器人的无菌保护套的装配方法,其特征在于,该装配方法包括如下步骤:
技术总结
本发明提供了一种用于血管腔内介入手术机器人的无菌保护套及其装配方法,包括执行手保护套;手术机器人包括机械臂和执行手;所述机械臂连接执行手;所述执行手保护套套设密封执行手;所述执行手保护套入口处密封在执行手靠近机械臂的端部;所述执行手保护套包裹住执行手远离机械臂的端部。本发明机构在血管介入机器人领域,使用无菌保护套可以有效包裹住有菌部分,从而使无菌部分不受污染。本发明机构在血管介入机器人领域,使用无菌保护套可以有效包裹住有菌部分(介入手术机器人),从而使无菌部分(指头耗材和摆杆耗材,以及指头耗材和摆杆耗材所夹持的导丝导管)不受污染,不易感染病菌,从而不易血液感染。
技术研发人员:周官林,钱磊,刘道志,刘奕琨
受保护的技术使用者:上海奥朋医疗科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!