一种医疗机器人的驱动装置及导管机器人的制作方法
本申请涉及医疗领域,特别是涉及一种医疗机器人的驱动装置和导管机器人。
背景技术:
1、微创医疗技术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术或进行活检的一种医疗方式。相比传统手术方式,微创医疗技术具有创伤小、疼痛轻、恢复快,减轻患者的不适并且减少有害的副作用等优势。
2、这种微创医疗技术可以通过患者解剖结构中的自然孔口或手术切口来执行,以使医疗器械在控制器的操控下到达目标组织位置处。微创医疗机器人系统通常包括医疗器械和操纵器设备,医疗器械通常是柔性和/或可转向的细长设备,其能够被插入解剖通孔中并且朝着患者解剖结构内的目标区域导航。而对医疗器械的控制涉及前进、缩回以及弯曲转向等,其中,弯曲转向主要是通过操纵器设备的驱动装置(如马达)控制导管器械的传动部旋转。
3、而现有驱动装置内部各元件布局不合理,没有充分利用驱动装置内部空间,使得整个驱动装置结构不紧凑。
技术实现思路
1、基于此,本申请在第一方面提供一种医疗机器人的驱动装置,其包括:
2、非气密性壳体;
3、多个马达组件,其容纳在所述壳体内,并被配置为驱动所述医疗机器人的医疗器械;
4、电路板组件,其至少包括相互电连接的第一电路板和第二电路板,所述第一电路板容纳在所述多个马达组件与所述壳体的底部之间第一容置空间中,所述第二电路板被配置为驱动所述多个马达组件中的第一马达组件,所述第二电路板至少部分容纳在所述多个马达组件之间的第二容置空间中。
5、在一个具体的实施例中,所述电路板组件还包括第三电路板,所述第三电路板被配置为驱动所述多个马达组件中的第二马达组件,所述第二电路板和所述第三电路板以垂直角度安装到所述第一电路板上,并且所述第二电路板和所述第三电路板相互垂直。
6、在一个具体的实施例中,所述多个马达组件还包括第三马达组件,所述第二电路板至少部分容纳在所述第一马达组件与所述第二马达组件之间,所述第三电路板至少部分容纳在所述第二马达组件与所述第三马达组件之间。
7、在一个具体的实施例中,所述电路板组件还包括第四电路板和第五电路板,所述多个马达组件还包括第四马达组件,所述第四电路板和所述第五电路板分别用于驱动所述第三马达组件和所述第四马达组件,所述第四电路板至少部分容纳在所述第三马达组件和所述第四马达组件之间,所述第五电路板至少部分容纳在所述第四马达组件和所述第一马达组件之间。
8、在一个具体的实施例中,所述驱动装置还包括容纳在所述第二容置空间中的散热装置,其被配置用于为所述电路板组件散热。
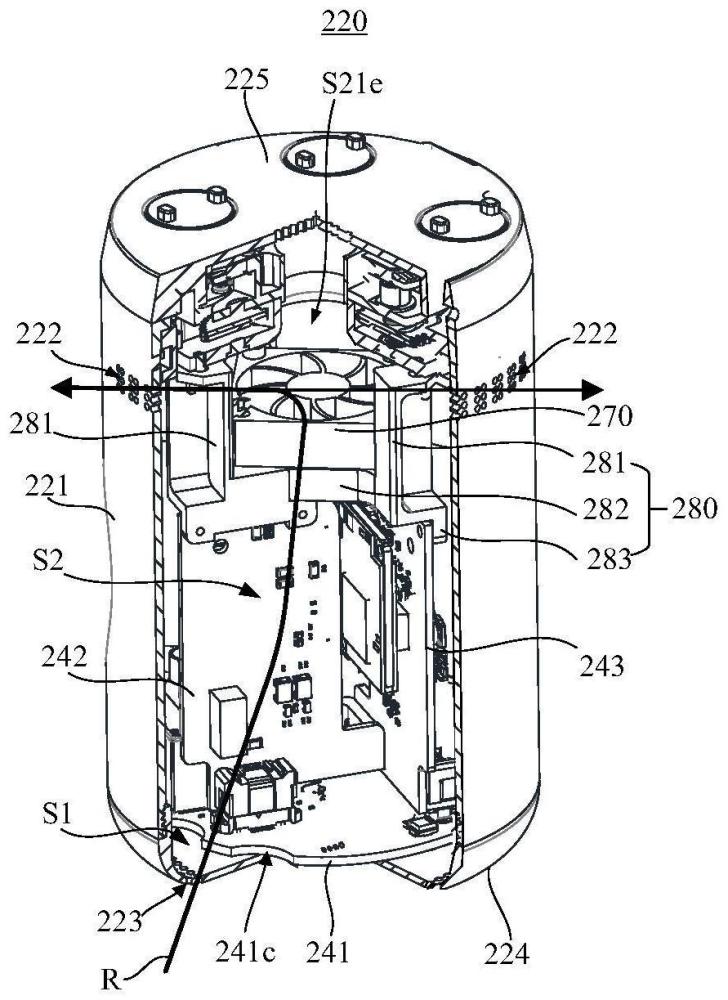
9、在一个具体的实施例中,所述驱动装置还包括散热风扇,所述散热风扇被配置为促进气体在所述第一容置空间、所述第二容置空间与所述壳体外进行流动。
10、在一个具体的实施例中,所述壳体包括底部通气孔和侧部通气孔,所述底部通气孔与所述第一容置空间连通,所述侧部通气孔与所述第二容置空间连通,所述散热风扇被配置为促进气体从所述底部通气孔依次进入所述第一容置空间和所述第二容置空间,并从所述侧部通气孔排出到所述壳体外。
11、在一个具体的实施例中,气体通过所述驱动装置内的流动路径将热量从驱动装置内带出,其中所述第一电路板在所述流动路径中位于所述第二电路板的上游。
12、在一个具体的实施例中,所述散热风扇在所述流动路径中位于所述第二电路板的下游。
13、在一个具体的实施例中,所述第一电路板包括用于驱动所述第一驱动马达组件的驱动器,所述驱动器相对于驱动装置的中心面倾斜设置,所述中心面经过所述驱动装置的中心轴线且贯穿所述驱动器的上下表面。
14、在一个具体的实施例中,所述驱动装置还包括容纳在所述第一容置空间中的上支架,所述散热装置与所述上支架固定连接,所述上支架的底座与所述第二电路板固定连接。
15、在一个具体的实施例中,所述上支架还包括从所述底座沿背离所述电路板组件的方向延伸出的多个支柱,所述多个支柱的末端与所述壳体固定连接。
16、在一个具体的实施例中,所述驱动装置还包括下支架,所述下支架与所述上支架相对设置,所述第一电路板通过所述下支架与所述第二电路板固定连接。
17、在一个具体的实施例中,所述驱动装置还包括电连接端子,所述电连接端子被配置为将所述第二电路板上的电子元器件与第一电路板上的电子元器件电连接。
18、本申请在第二方面提供了一种导管机器人,其包括:
19、第一驱动装置,其被配置为驱动外导管器械的外导管运动;
20、第二驱动装置,其被配置为驱动内导管器械的内导管运动,所述内导管至少部分容纳在所述外导管中,并被所述外导管所支撑;
21、所述第一驱动装置和所述第二驱动装置中的每个驱动装置包括多个马达组件,所述多个马达组件容纳在壳体内;
22、电路板组件,所述电路板组件至少包括第一电路板和第二电路板,所述第二电路板被配置为驱动所述多个马达组件中的第一马达组件,所述第一电路板容纳在所述多个马达组件与所述壳体之间的第一容置空间中,所述第二电路板至少部分容纳在所述多个马达组件之间的第二容置空间中。
技术特征:
1.一种医疗机器人的驱动装置,其特征在于,包括:
2.如权利要求1所述的驱动装置,其特征在于,所述电路板组件还包括第三电路板,所述第三电路板被配置为驱动所述多个马达组件中的第二马达组件,所述第二电路板和所述第三电路板以垂直角度安装到所述第一电路板上,并且所述第二电路板和所述第三电路板相互垂直。
3.如权利要求2所述的驱动装置,其特征在于,所述多个马达组件还包括第三马达组件,所述第二电路板至少部分容纳在所述第一马达组件与所述第二马达组件之间,所述第三电路板至少部分容纳在所述第二马达组件与所述第三马达组件之间。
4.如权利要求3所述的驱动装置,其特征在于,所述电路板组件还包括第四电路板和第五电路板,所述多个马达组件还包括第四马达组件,所述第四电路板和所述第五电路板分别用于驱动所述第三马达组件和所述第四马达组件,所述第四电路板至少部分容纳在所述第三马达组件和所述第四马达组件之间,所述第五电路板至少部分容纳在所述第四马达组件和所述第一马达组件之间。
5.如权利要求1所述的驱动装置,其特征在于,所述驱动装置还包括容纳在所述第二容置空间中的散热装置,其被配置用于为所述电路板组件散热。
6.如权利要求1所述的驱动装置,其特征在于,所述驱动装置还包括散热风扇,所述散热风扇被配置为促进气体在所述第一容置空间、所述第二容置空间与所述壳体外进行流动。
7.如权利要求6所述的驱动装置,其特征在于,所述壳体包括底部通气孔和侧部通气孔,所述底部通气孔与所述第一容置空间连通,所述侧部通气孔与所述第二容置空间连通,所述散热风扇被配置为促进气体从所述底部通气孔依次进入所述第一容置空间和所述第二容置空间,并从所述侧部通气孔排出到所述壳体外。
8.如权利要求6所述的驱动装置,其特征在于,气体通过所述驱动装置内的流动路径将热量从驱动装置内带出,其中所述第一电路板在所述流动路径中位于所述第二电路板的上游。
9.如权利要求8所述的驱动装置,其特征在于,所述散热风扇在所述流动路径中位于所述第二电路板的下游。
10.如权利要求5-9任一项所述的驱动装置,其特征在于,所述第一电路板包括用于驱动所述第一驱动马达组件的驱动器,所述驱动器相对于驱动装置的中心面倾斜设置,所述中心面经过所述驱动装置的中心轴线且贯穿所述驱动器的上下表面。
11.如权利要求5所述的驱动装置,其特征在于,所述驱动装置还包括容纳在所述第一容置空间中的上支架,所述散热装置与所述上支架固定连接,所述上支架的底座与所述第二电路板固定连接。
12.如权利要求11所述的驱动装置,其特征在于,所述上支架还包括从所述底座沿背离所述电路板组件的方向延伸出的多个支柱,所述多个支柱的末端与所述壳体固定连接。
13.如权利要求11所述的驱动装置,其特征在于,所述驱动装置还包括下支架,所述下支架与所述上支架相对设置,所述第一电路板通过所述下支架与所述第二电路板固定连接。
14.如权利要求1所述的驱动装置,其特征在于,所述驱动装置还包括电连接端子,所述电连接端子被配置为将所述第二电路板上的电子元器件与第一电路板上的电子元器件电连接。
15.一种导管机器人,其特征在于,包括:
技术总结
本申请实施例提供一种医疗机器人的驱动装置及导管机器人,其中驱动装置包括多个马达组件和电路板组件,多个马达组件容纳在壳体内并被配置为驱动医疗机器人的手术器械;电路板组件至少包括相互电连接的第一电路板和第二电路板,其中第一电路板容纳在所述多个马达组件与所述壳体的底部之间第一容置空间中,第二电路板容纳在多个马达组件之间的第二容置空间中。
技术研发人员:刘放,王建辰
受保护的技术使用者:深圳市精锋医疗科技股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!