一种智能脚踝康复训练系统及方法与流程
1.本发明涉及康复辅助工具技术领域,具体涉及一种智能脚踝康复训练系统及方法。
背景技术:
2.踝关节扭伤后可能发生很多种伤情,包括韧带损伤或断裂、骨折脱位,关节软骨损伤、肌腱损伤或断裂等。脚踝是人体负重最大的关节,关节面比髋、膝关节小,但承受的体重却大于髋、膝关节。因踝关节接近地面,受力无法得到有效缓冲,稍有不适,就会造成明显的踝关节功能障碍。所以,脚踝扭伤后进行康复治疗非常关键。目前,脚踝康复训练的装置多种多样,然而这些训练装置只能被动地按照固定模式进行康复训练。患者使用康复训练装置进行一段时间的训练之后,无法准确判断自身康复情况,通常需要咨询医生才能得知自己是否已完成本阶段的康复训练,使用效果不佳;除此之外,现有的脚踝训练装置难以根据自身情况进行不同模式的康复训练,且无法准确设置不同模式下的训练时长和训练次数,影响使用灵活性。
3.为了解决现有技术存在的不足,人们进行了长期的探索,提出了各式各样的解决方案。例如,中国专利文献公开了一种脚踝康复训练的控制方法、装置、电子设备及存储介质[cn202010586705.1],它包括获取当前训练模式下脚踝训练时对应的当前姿态参数;基于所述当前姿态参数控制模式切换,当所述当前姿态参数符合切换要求,生成切换提示信息;根据所述切换提示信息将所述当前训练模式切换为目标训练模式,根据所述目标训练模式进行脚踝康复训练。
[0004]
上述方案在一定程度上解决了现有技术中脚踝康复装置的训练模式固定且难以自身判断康复情况,使用效果不佳的问题,但是该方案依然存在着诸多不足,例如:难以根据自身情况进行不同模式的康复训练,影响使用灵活性,且训练时长和训练次数难以准确掌握,操作不便。
技术实现要素:
[0005]
本发明的目的是针对上述问题,提供一种设计合理、使用灵活的一种智能脚踝康复训练系统。
[0006]
本发明的目的是针对上述问题,提供一种设计合理、操作方便的一种智能脚踝康复训练方法。
[0007]
为达到上述目的,本发明采用了下列技术方案:一种智能脚踝康复训练系统,包括用于套设在足部的定位带体,定位带体两端之间设有调节连接机构,且定位带体上通过插接连接组件电性连接有具有计数模块的训练监测组件,训练监测组件与移动端无线连接并进行数据传输,且移动端与云平台数据连接,定位带体底部通过拉伸连接带连接有用于踩在足跟部的环形定位结构,且拉伸连接带上连接有用于固定于腿部并能够推动脚部运动的自动推动组件。通过在足部套设定位带体,且通过拉伸连接带连接踩在足跟部的环形定位
结构使脚踝在进行康复训练时定位效果更好,同时利用移动端自由设置训练模式,通过训练监测组件对训练的时长、次数及模式进行监测,摆脱传统固定的训练模式,根据需要灵活实现多样化的康复训练,且训练数据通过移动端能够实时查看并根据需要上传至云平台,使用灵活性佳。
[0008]
在上述的一种智能脚踝康复训练系统中,训练监测组件包括装配盒体,装配盒体外壁设有计数显示屏幕,计数显示屏幕与上述的计数模块连接,且装配盒体内设有加速度传感器,加速度传感器连接有控制模块,且控制模块连接有陀螺仪模块,控制模块与计数显示屏幕之间进行数据传输,且控制模块通过无线模块与移动端数据连接。陀螺仪模块能够有效判定训练中脚踝的训练状态,便于训练模式的确定以及计数模块对训练次数的计数。
[0009]
在上述的一种智能脚踝康复训练系统中,定位带体内嵌设有振动马达,振动马达和控制模块电性连接,且定位带体上设有弹性连接部,定位带体两端呈弧形设置。振动马达可以对使用者进行模式切换和模式错误的提醒。
[0010]
在上述的一种智能脚踝康复训练系统中,调节连接机构包括设置在定位带体一端的带体定位部,且定位带体另一端具有带体连接部,带体定位部上设有连接按扣,且带体连接部上设有若干与连接按扣对应设置的连接孔,弹性连接部设置在带体定位部与训练监测组件之间。调节连接机构的设置可以根据不同使用者的足部宽度进行自由调节,使用灵活。
[0011]
在上述的一种智能脚踝康复训练系统中,环形定位结构包括环形定位盘体,环形定位盘体底部连接有柔性定位部,且柔性定位部底部具有振动提醒模块及压力传感模块,拉伸连接带一端与环形定位盘体上端面连接且另一端与定位带体底部相连,拉伸连接带中部具有弹性延伸部;所述的自动推动组件包括设置拉伸连接带且位于弹性延伸部上侧的连接定位带,且连接定位带两端连接在推动块体上的可调式锁紧扣内,所述的推动块体连接有微型推动气缸,且微型推动气缸远离推动块体的一端设有气缸顶压块,所述的气缸顶压块通过柔性带体固定在人体腿部环形定位结构可以对定位带体进行拉紧,且振动提醒模块及压力传感模块能够发出佩戴完成的提醒,使用效果好。
[0012]
在上述的一种智能脚踝康复训练系统中,插接连接组件设置在定位带体外壁的卡接部,卡接部周向内侧具有连接插槽,且装配盒体背部设有连接插片,连接插片可拆设置在连接插槽内,且连接插片上设有金属导电材料制成的电性连接部,连接插槽内壁设有与电性连接部对应设置的接电部,且电性连接部通过电性连接线与设置在装配盒体内的电路板相连,接电部与设置在定位带体内的振动马达相连。插接连接组件的设置使控制模块能够与振动马达振动提醒模块及压力传感模块实现供电和数据传输。
[0013]
根据上述的一种智能脚踝康复训练系统提供一种智能脚踝康复训练方法,本方法包括以下步骤:
[0014]
s1、将定位带体套设在足部,并将柔性定位部踩在足跟部,完成安装;
[0015]
s2、通过移动端设置训练模式,并在开始训练时启动训练监测组件;可以根据自身情况对训练模式进行设定,确定适合的训练模式。
[0016]
s3、根据预先设置的训练模式进行康复训练,并通过训练监测组件进行训练监测;在训练的过程中利用训练监测组件进行训练监测,并进行训练数据记录,便于及时了解训练状态。
[0017]
s4、训练监测组件的检测数据实时发送至移动端,移动端通过数据网络同步至云
平台,云平台根据训练数据进行排名并发送排名至移动端。通过数据排名能够激励使用者积极进行康复训练。
[0018]
在上述的一种智能脚踝康复训练方法中,在步骤s1中,定位带体套设在足部并根据足部宽度利用调节连接机构自由调节松紧度,柔性定位部利用拉伸连接带拉伸后套设于足跟部底部形成定位,完成安装后,压力传感模块受到足跟部的压力,振动提醒模块发出振动提醒,提示佩戴完成。压力传感器的判定足跟力度。
[0019]
在上述的一种智能脚踝康复训练方法中,在步骤s2中,训练模式包括横向弧形训练模式、纵向弧形训练模式以及横向弧形训练模式与纵向弧形训练模式相结合的综合训练模式,当设置不同的训练模式时,设置在定位带体内的振动马达发出不同频率的振动提醒;通过不同的训练模式能够满足多样化的康复训练需求。
[0020]
在综合训练模式中,能够利用手机端对横向弧形训练模式、纵向弧形训练模式以及综合训练模式的训练次数或训练时间进行设置,当达到设定的训练次数或训练时间时,则通过振动马达进行振动提醒使用者切换训练模式;
[0021]
其次,当训练结束后,利用设置在柔性定位部底部的振动提醒模块发出训练结束提醒。
[0022]
在上述的一种智能脚踝康复训练方法中,在步骤s3中,训练监测组件检测足部的训练模式以及训练时间进行检测,其中,加速度传感器用于检测训练速度,陀螺仪模块进行训练模式的检测,计数模块用于对各个模式下的训练次数进行检测,当监测到训练模式与设定模式不同时立即停止计数并通过振动马达发出振动提醒,当恢复设定的训练模式时即继续计数,且在训练过程中需要暂停或停止时则通过移动端停止,计数模块的计数数据实时同步至移动端;在步骤s4中,排名分为各个训练模式下的训练次数排名、各个训练模式下的训练时间排名以及相同时间内的训练次数排名。通过训练检测组件对训练过程进行数据检测,提供丰富的训练数据,有利于做出针对性的训练计划。
[0023]
与现有的技术相比,本发明的优点在于:设计合理、原理简单,摆脱了传统的固定训练模式,通过移动端根据实际情况设定合适的训练模式,并且在进行设定模式训练的过程中通过训练监测组件对训练数据进行记录,并且能够进行实时的训练提醒,同时将训练数据及时发送至移动端,便于使用者根据训练数据制定合适的训练计划,有利于了解康复情况,不仅使用灵活性佳,而且操作方便,使用效果好。
附图说明
[0024]
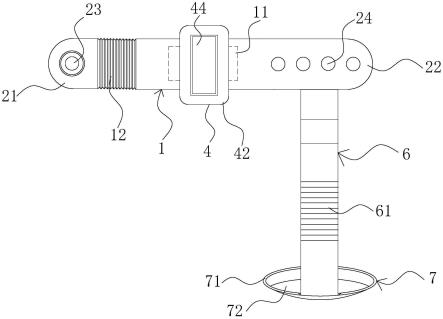
图1是本发明的展开后的机构示意图;
[0025]
图2是本发明的侧视图;
[0026]
图3是本发明中的装配盒体剖视图;
[0027]
图4是本发明中的定位带体结构示意图;
[0028]
图5是本发明中的局部结构连接框图;
[0029]
图6是本发明中的方法流程图;
[0030]
图7是本发明中的自动推动组件结构示意图。
[0031]
图中:定位带体1、振动马达11、弹性连接部12、调节连接机构2、带体定位部21、带体连接部22、连接按扣23、连接孔24、插接连接组件3、卡接部31、连接插槽32、连接插片33、
电性连接部34、接电部35、电性连接线36、训练监测组件4、计数模块41、装配盒体42、计数显示屏幕43、加速度传感器44、控制模块45、陀螺仪模块46、无线模块47、电路板48、移动端5、云平台51、拉伸连接带6、拉伸连接带61、环形定位结构7、环形定位盘体71、柔性定位部72、振动提醒模块73、压力传感模块74、自动推动组件8、连接定位带81、推动块体82、可调式锁紧扣821、微型推动气缸83、气缸顶压块84、柔性带体85。
具体实施方式
[0032]
下面结合附图和具体实施方式对本发明做进一步详细的说明。
[0033]
如图1-7所示,一种智能脚踝康复训练系统,包括用于套设在足部的定位带体1,定位带体1两端之间设有调节连接机构2,且定位带体1上通过插接连接组件3电性连接有具有计数模块41的训练监测组件4,训练监测组件4与移动端5无线连接并进行数据传输,且移动端5与云平台51数据连接,定位带体1底部通过拉伸连接带6连接有用于踩在足跟部的环形定位结构7,且拉伸连接带6上连接有用于固定于腿部并能够推动脚部运动的自动推动组件8。使用时,将环形定位结构7踩在足跟部,并将定位带体1套设在足部,根据不同使用者的足部宽度利用调节连接机构2进行定位带体1的直径的调节,同时将自动推动组件8倾斜定位在足部与腿部之间,进行训练时,利用移动端5进行模式设定并在训练时通过训练监测组件4进行训练数据记录,记录的数据及时传输至移动端5并通过移动端5上传至云平台51进行数据排名。
[0034]
其中,训练监测组件4包括装配盒体42,装配盒体42外壁设有计数显示屏幕43,计数显示屏幕43与上述的计数模块41连接,且装配盒体42内设有加速度传感器44,加速度传感器44连接有控制模块45,且控制模块45连接有陀螺仪模块46,控制模块45与计数显示屏幕43之间进行数据传输,且控制模块45通过无线模块47与移动端5数据连接。计数模块41用于在不同模式下记录脚踝的训练次数,往复一次记为训练一次,计数显示屏幕43实时显示训练次数,陀螺仪模块46用于判定脚踝的横向弧形训练模式和纵向弧形训练模式。
[0035]
可见地,定位带体1内嵌设有振动马达11,振动马达11和控制模块45电性连接,且定位带体1上设有弹性连接部12,定位带体1两端呈弧形设置。振动马达11主要用于模式切换和时长提醒。
[0036]
进一步地,调节连接机构2包括设置在定位带体1一端的带体定位部21,且定位带体1另一端具有带体连接部22,带体定位部21上设有连接按扣23,且带体连接部22上设有若干与连接按扣23对应设置的连接孔24,弹性连接部12设置在带体定位部21与训练监测组件4之间。采用连接按扣23与连接孔24的配合以及弹性连接部12的拉伸作用使定位带体1具有好的松紧度和直径调节空间。
[0037]
显然地,环形定位结构7包括环形定位盘体71,环形定位盘体71底部连接有柔性定位部72,且柔性定位部72底部具有振动提醒模块73及压力传感模块74,拉伸连接带6一端与环形定位盘体71上端面连接且另一端与定位带体1底部相连,拉伸连接带6中部具有弹性延伸部61;所述的自动推动组件8包括设置拉伸连接带6且位于弹性延伸部61上侧的连接定位带81,且连接定位带81两端连接在推动块体82上的可调式锁紧扣821内,所述的推动块体82连接有微型推动气缸83,且微型推动气缸83远离推动块体82的一端设有气缸顶压块84,所述的气缸顶压块84通过柔性带体85固定在人体腿部。压力传感模块74用于检测训练和佩戴
时的足跟部压力,当佩戴完成或足跟部压力达到设定范围时则通过振动提醒模块73进行振动提醒,通过微型推动气缸83的往复运动能够带动脚部进行被动纵向弧形训练模式,提高运动准确性。
[0038]
详细地,插接连接组件3设置在定位带体1外壁的卡接部31,卡接部31周向内侧具有连接插槽32,且装配盒体42背部设有连接插片33,连接插片33可拆设置在连接插槽32内,且连接插片33上设有金属导电材料制成的电性连接部34,连接插槽32内壁设有与电性连接部34对应设置的接电部35,且电性连接部34通过电性连接线36与设置在装配盒体42内的电路板48相连,接电部35与设置在定位带体1内的振动马达11相连。插接连接组件对装配盒体42进行定位,使装配盒体42能够与脚踝进行同步训练,且电性连接部34及接电部35为控制模块45与振动马达11、振动提醒模块73及压力传感模块74提供电信号传输。
[0039]
一种智能脚踝康复训练方法,本方法包括以下步骤:
[0040]
s1、将定位带体1套设在足部,并将柔性定位部72踩在足跟部,完成安装;
[0041]
s2、通过移动端5设置训练模式,并在开始训练时启动训练监测组件4;
[0042]
s3、根据预先设置的训练模式进行康复训练,并通过训练监测组件4进行训练监测;
[0043]
s4、训练监测组件4的检测数据实时发送至移动端5,移动端5通过数据网络同步至云平台51,云平台51根据训练数据进行排名并发送排名至移动端5。
[0044]
在步骤s1中,定位带体1套设在足部并根据足部宽度利用调节连接机构2自由调节松紧度,柔性定位部72利用拉伸连接带6拉伸后套设于足跟部底部形成定位,完成安装后,压力传感模块74受到足跟部的压力,振动提醒模块73发出振动提醒,提示佩戴完成。这里的压力传感模块74的受力感应值可以通过移动端5进行设定,当足跟部施加的压力达到设定值时,则通过振动提醒模块73发出振动提醒。
[0045]
在步骤s2中,训练模式包括横向弧形训练模式、纵向弧形训练模式以及横向弧形训练模式与纵向弧形训练模式相结合的综合训练模式,当设置不同的训练模式时,设置在定位带体1内的振动马达11发出不同频率的振动提醒;这样设置用于提醒使用者及时切换训练模式。
[0046]
在综合训练模式中,能够利用手机端对横向弧形训练模式、纵向弧形训练模式以及综合训练模式的训练次数或训练时间进行设置,当达到设定的训练次数或训练时间时,则通过振动马达11进行振动提醒使用者切换训练模式;根据自身实际情况利用移动端5设定训练模式、训练时长以及各个模式下的训练次数,避免过劳导致二次损伤,提高使用安全性。
[0047]
其次,当训练结束后,利用设置在柔性定位部72底部的振动提醒模块73发出训练结束提醒。当训练结束后将训练数据发送至移动端5进行数据统计,并上传至云平台51进行排名。
[0048]
在步骤s3中,训练监测组件4检测足部的训练模式以及训练时间进行检测,其中,加速度传感器44用于检测训练速度,陀螺仪模块46进行训练模式的检测,计数模块41用于对各个模式下的训练次数进行检测,当监测到训练模式与设定模式不同时立即停止计数并通过振动马达11发出振动提醒,当恢复设定的训练模式时即继续计数,且在训练过程中需要暂停或停止时则通过移动端5停止,计数模块41的计数数据实时同步至移动端5。
[0049]
在步骤s4中,排名分为各个训练模式下的训练次数排名、各个训练模式下的训练时间排名以及相同时间内的训练次数排名。
[0050]
综上所述,本实施例的原理在于:使用时,将柔性定位部72踩在足跟部,当足跟部施加的压力达到设定的压力范围时,则通过振动提醒模块73发出提醒,并将定位带体1套设在足部,根据不同使用者的足部宽度利用调节连接机构2进行定位带体1的直径调节,进行训练时,利用移动端5进行模式设定并在训练时通过训练监测组件4进行训练数据记录和运动模式监测,监测到训练模式与设定的模式不同时,则通过振动马达11进行提醒,当到达设定的训练时长和训练次数时同样通过振动马达11进行提醒,训练完成后记录的数据及时传输至移动端5并通过移动端5进行数据整理并上传至云平台51进行数据排名。
[0051]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
[0052]
尽管本文较多地使用了定位带体1、振动马达11、弹性连接部12、调节连接机构2、带体定位部21、带体连接部22、连接按扣23、连接孔24、插接连接组件3、卡接部31、连接插槽32、连接插片33、电性连接部34、接电部35、电性连接线36、训练监测组件4、计数模块41、装配盒体42、计数显示屏幕43、加速度传感器44、控制模块45、陀螺仪模块46、无线模块47、电路板48、移动端5、云平台51、拉伸连接带6、拉伸连接带61、环形定位结构7、环形定位盘体71、柔性定位部72、振动提醒模块73、压力传感模块74、、自动推动组件8、连接定位带81、推动块体82、可调式锁紧扣821、微型推动气缸83、气缸顶压块84、柔性带体85等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1