一种3D成像的CT图像设备
一种3d成像的ct图像设备
技术领域
1.本发明涉及医疗领域,更具体的说是一种3d成像的ct图像设备。
背景技术:
2.近代先进科技正引入各大领域,而在医疗领域中ct设备较为古板,移动不便也无固定防患措施。
3.例如:cn207341765u,固定式ct检查装置,固定式ct检查装置,属于医疗用具技术领域。本实用新型的技术方案是:包括ct检查装置主体,在ct检查装置主体内部设有滑动轨道,滑动轨道上设有滑动器,滑动器上设有弧形固定架,弧形固定架上设有x光发射器,ct检查装置主体前侧设有扫描位置控制板,扫描位置控制板上设有向左按钮和向右按钮,ct检查装置主体下侧设有固定台,固定台前侧设有显示屏,显示屏上设有成像管,固定台内部设有电源箱,电源箱上侧设有配电板,电源箱内部设有蓄电池,电源箱前侧设有电源线接口,电源线接口内设有电源线,电源线与电源插头连接。本实用新型结构简单,使用方便,在进行ct检查时,操作简便、省时省力、科学有效,极大地减轻了医务人员的工作难度。滑轨装置不稳定,无四肢固定装置,易与ct机内部发生触碰形成医疗隐患。
技术实现要素:
4.本发明的目的是提供一种3d成像的ct图像设备,可通过第一电机控制总成使得ct机沿ct床支撑座轨道内工作,通过第二电机控制总成控制第一下肢固定总成、第二下肢固定总成运作,实现下肢固定功能,通过第二电机控制总成控制第一上肢固定总成、第二上肢固定总成运作,用于上肢夹紧固定。
5.本发明的目的通过以下技术方案来实现:
6.一种3d成像的ct图像设备,其特征在于:包括第一电机控制总成、第二电机控制总成、第一下肢固定总成、第二下肢固定总成、第一上肢固定总成、第二上肢固定总成、ct床支撑座、ct机,第一电机控制总成、第二电机控制总成、第一下肢固定总成、第二下肢固定总成、第一上肢固定总成、第二上肢固定总成、ct机均与ct床支撑座相连接,第一下肢固定总成通过第二电机控制总成与第二下肢固定总成相连接,第一上肢固定总成通过第二电机控制总成与第二上肢固定总成相连接。
7.作为本技术方案的进一步优化,本发明一种3d成像的ct图像设备,所述第一电机控制总成包括电机a、联轴器a、异形连杆轴a、齿轮座、异形连杆轴b、齿轮a、齿轮b、连接块a、异形连杆轴c、轴固定座a、涡轮a、蜗杆轴a、轴固定座b、齿轮c、齿轮d、轴a、轴固定座c、异形连杆a、滚轮a、滚轮b、异形连杆b、轴固定座d、支撑底座a、带轴带轮a、皮带a、带轮a,电机a通过其输出轴与联轴器a固定连接,联轴器a与异形连杆轴a固定连接,异形连杆轴a与齿轮座转动连接,异形连杆轴a与异形连杆轴b转动连接,齿轮a、齿轮b均与齿轮座啮合连接,异形连杆轴b与齿轮a、齿轮b转动连接,异形连杆轴b与连接块a固定连接,异形连杆轴c与轴固定座a转动连接,连接块a与异形连杆轴c转动连接,异形连杆轴c与涡轮a转动连接,涡轮a与蜗
杆轴a啮合连接,蜗杆轴a、轴a均与轴固定座b转动连接,蜗杆轴a与齿轮c固定连接,齿轮c与齿轮d啮合连接,齿轮d与z轴a固定连接,轴a与轴固定座c转动连接,轴a与异形连杆a固定连接,异形连杆a与滚轮a、滚轮b转动连接,滚轮a、滚轮b均与异形连杆b连接,支撑底座a与带轴带轮a固定连接,带轴带轮a通过皮带a与带轮a转动连接。
8.作为本技术方案的进一步优化,本发明一种3d成像的ct图像设备,所述第二电机控制总成包括电机b、联轴器b、轴b、伞齿轮a、伞齿轮b、轴c、轴固定座e、齿轮e、轴套a、异形连杆轴d、齿轮f、轴固定销、齿轮g、轴固定座f、轴套b、轴固定座g、轴d、伞齿轮c、伞齿轮d、伞齿轮e、轴固定座h、轴固定座i、涡轮b、蜗杆b、齿轮g、齿轮h、轴e、伞齿轮f、齿轮i、齿轮j、轴f、伞齿轮g,电机b其输出轴通过联轴器b与轴b固定连接,轴b与伞齿轮a固定连接,伞齿轮a与伞齿轮b啮合连接,伞齿轮b与轴c固定连接,轴c与轴固定座e、异形连杆轴d转动连接,轴c与齿轮e、轴套a固定连接,异形连杆轴d与齿轮f转动连接,齿轮f与轴固定销转动连接,齿轮e、齿轮g均与齿轮f啮合连接,齿轮g与轴c固定连接,轴固定座f、轴套b均与轴c转动连接,伞齿轮e、固定座h、涡轮b均与轴c固定连接,伞齿轮c、伞齿轮d均与伞齿轮e啮合连接,伞齿轮c、伞齿轮d均与轴d固定连接,轴固定座g与轴d转动连接,涡轮b与蜗杆b啮合连接,轴固定座i与蜗杆b转动连接,齿轮g、齿轮i均与蜗杆b固定连接,齿轮g与齿轮h啮合连接,齿轮h、伞齿轮f均与轴e固定连接,齿轮i与齿轮j啮合连接,齿轮j、伞齿轮g均与轴f固定连接。
9.作为本技术方案的进一步优化,本发明一种3d成像的ct图像设备,所述第一下肢固定总成包括带轴联轴器、齿轮k、齿轮l、轴g、曲柄a、连杆a、曲柄b、连杆b、异形连杆c、滑块轴a、滑块a、支撑底座b、带轴齿条a、齿轮m、轴h、轴固定座j、带轮b、皮带b、带轮c、轴i、伞齿轮h、伞齿轮i、轴j、齿轮n、连杆固定板a、带齿连杆a、轴k、连杆c、轴l、带齿连杆b、连杆d、连杆e、连杆f、连杆g、连杆h、护肢连杆a、护肢连杆b,带轴联轴器通过其输出轴与齿轮k固定连接,齿轮k与齿轮l啮合连接,带轴联轴器、轴g均与支撑底座b转动连接,曲柄a、曲柄b均与轴g固定连接,曲柄a通过连杆a与异形连杆c转动连接,曲柄b通过连杆b与异形连杆c转动连接,异形连杆c通过滑块轴a与滑块a转动连接,滑块a与支撑底座b连接,滑块a与带轴齿条a固定连接,带轴齿条a与齿轮m啮合连接,齿轮m、带轮b均与轴h固定连接,轴h与轴固定座j转动连接,带轮b通过皮带b与带轮c转动连接,带轮c、伞齿轮h均与轴i固定连接,伞齿轮h与伞齿轮i啮合连接,伞齿轮i、齿轮n均与轴j固定连接,轴k、轴l均与连杆固定板a转动连接,带齿连杆a与轴k固定连接,轴l与带齿连杆b固定连接,带齿连杆a与带齿连杆b啮合连接,护肢连杆a通过带齿连杆a、连杆c、连杆g、连杆h与连杆固定板a转动连接,护肢连杆b通过带齿连杆b、连杆d、连杆e、连杆f与连杆固定板a转动连接。
10.作为本技术方案的进一步优化,本发明一种3d成像的ct图像设备,所述第二下肢固定总成所含部件均与第一下肢固定总成相同,其装配方式、顺序均与第一下肢固定总成相同,其运行顺序、实现功能均与第一下肢固定总成相同。
11.作为本技术方案的进一步优化,本发明一种3d成像的ct图像设备,所述第一上肢固定总成包括伞齿轮j、异形连杆轴e、齿轮o、齿轮p、异形连杆轴f、连杆i、连杆j、连杆k、连杆l、连杆m、异形连杆轴g、异形连杆d、带轴齿条b、支撑底座c、轴固定座k、齿轮q、轴m、伞齿轮j、伞齿轮k、轴n、轴套c、齿轮r、带齿连杆c、带齿连杆d、护肢连杆c、护肢连杆d、连杆n、连杆o、连杆p、连杆q、连杆r、连杆固定板b、z型固定块,伞齿轮j、齿轮o均与异形连杆轴e固定连接,齿轮o与齿轮p啮合连接,齿轮p与异形连杆轴f固定连接,异形连杆轴f通过连杆j与连
杆k转动连接,异形连杆轴e通过连杆l与连杆k转动连接,异形连杆轴f通过连杆i与异形连杆d转动连接,异形连杆轴e通过连杆m与异形连杆d转动连接,异形连杆d与支撑底座c连接,异形连杆轴g与连杆k转动连接,异形连杆d与带轴齿条b连接,带轴齿条b与齿轮q啮合连接,齿轮q、伞齿轮j均与轴m固定连接,轴m与轴固定座k转动连接,伞齿轮j与伞齿轮k啮合连接,伞齿轮k、齿轮r均与轴n固定连接,轴n与轴套c转动连接,连杆固定板b与z型固定块固定连接,护肢连杆c通过带齿连杆c、护肢连杆d、连杆n、连杆o与连杆固定板b转动连接,护肢连杆d通过带齿连杆d、连杆p、连杆q、连杆r与连杆固定板b转动连接。
12.作为本技术方案的进一步优化,本发明一种3d成像的ct图像设备,所述第二上肢固定总成所含部件均与第一上肢固定总成相同,其装配方式、顺序均与第一上肢固定总成相同,其运行顺序、实现功能均与第一上肢固定总成相同。
13.作为本技术方案的进一步优化,本发明一种3d成像的ct图像设备,所述ct床支撑座包括支撑总成、螺杆、方管轨道a、方管轨道b、床板,支撑总成与螺杆转动连接,方管轨道a、方管轨道b均与支撑总成固定连接,床板与支撑总成固定连接。
14.作为本技术方案的进一步优化,本发明一种3d成像的ct图像设备,所述ct机包括ct机、ct机底座、轨道轮,ct机与ct机底座固定连接,ct机底座与轨道轮转动连接。
15.本发明一种3d成像的ct图像设备的有益效果为:
16.本发明的一种3d成像的ct图像设备,可通过第一电机控制总成使得ct机沿ct床支撑座轨道内工作,通过第二电机控制总成控制第一下肢固定总成、第二下肢固定总成运作,实现下肢固定功能,通过第二电机控制总成控制第一上肢固定总成、第二上肢固定总成运作,用于上肢夹紧固定。
附图说明
17.下面结合附图和具体实施方法对本发明做进一步详细的说明。
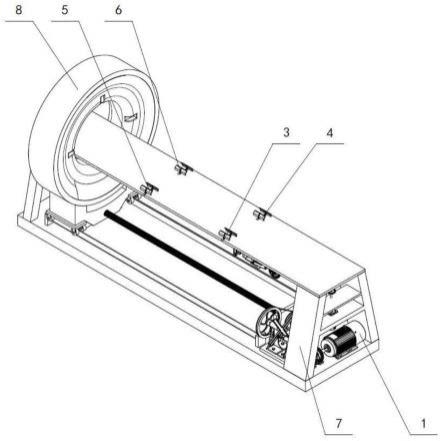
18.图1是本发明的整体结构示意图一;
19.图2是本发明的整体结构示意图二;
20.图3是本发明的第一电机控制总成结构示意图一;
21.图4是本发明的第二电机控制总成结构示意图一;
22.图5是本发明的第一下肢固定总成结构示意图一;
23.图6是本发明的第一下肢固定总成结构示意图二;
24.图7是本发明的第一下肢固定总成结构示意图一;
25.图8是本发明的第一下肢固定总成结构示意图二;
26.图9是本发明的ct床支撑座结构示意图一;
27.图10是本发明的ct机结构示意图一;
28.图中:第一电机控制总成1;电机a1-1;联轴器a1-2;异形连杆轴a1-3;齿轮座1-4;异形连杆轴b1-5;齿轮a1-6;齿轮b1-7;连接块a1-8;异形连杆轴c1-9;轴固定座a1-10;涡轮a1-11;蜗杆轴a1-12;轴固定座b1-13;齿轮c1-14;齿轮d1-15;轴a1-16;轴固定座c1-17;异形连杆a1-18;滚轮a1-19;滚轮b1-20;异形连杆b1-21;轴固定座d1-22;支撑底座a1-23;带轴带轮a1-24;皮带a1-25;带轮a1-26;第二电机控制总成2;电机b2-1;联轴器b2-2;轴b2-3;伞齿轮a2-4;伞齿轮b2-5;轴c2-6;轴固定座e2-7;齿轮e2-8;轴套a2-9;异形连杆轴d2-10;
齿轮f2-11;轴固定销2-12;齿轮g2-13;轴固定座f2-14;轴套b2-15;轴固定座g2-16;轴d2-17;伞齿轮c2-18;伞齿轮d2-19;伞齿轮e2-20;轴固定座h2-21;轴固定座i2-22;涡轮b2-23;蜗杆b2-24;齿轮g2-25;齿轮h2-26;轴e2-27;伞齿轮f2-28;齿轮i2-29;齿轮j2-30;轴f2-31;伞齿轮g2-32;第一下肢固定总成3;带轴联轴器3-1;齿轮k3-2;齿轮l3-3;轴g3-4;曲柄a3-5;连杆a3-6;曲柄b3-7;连杆b3-8;异形连杆c3-9;滑块轴a3-10;滑块a3-11;支撑底座b3-12;带轴齿条a3-13;齿轮m3-14;轴h3-15;轴固定座j3-16;带轮b3-17;皮带b3-18;带轮c3-19;轴i3-20;伞齿轮h3-21;伞齿轮i3-22;轴j3-23;齿轮n3-24;连杆固定板a3-25;带齿连杆a3-26;轴k3-27;连杆c3-28;轴l3-29;带齿连杆b3-30;连杆d3-31;连杆e3-32;连杆f3-33;连杆g3-34;连杆h3-35;护肢连杆a3-36;护肢连杆b3-37;第二下肢固定总成4;第一上肢固定总成5;伞齿轮j5-1;异形连杆轴e5-2;齿轮o5-3;齿轮p5-4;异形连杆轴f5-5;连杆i5-6;连杆j5-7;连杆k5-8;连杆l5-9;连杆m5-10;异形连杆轴g5-11;异形连杆d5-12;带轴齿条b5-13;支撑底座c5-14;轴固定座k5-15;齿轮q5-16;轴m5-17;伞齿轮j5-18;伞齿轮k5-19;轴n5-20;轴套c5-21;齿轮r5-22;带齿连杆c5-23;带齿连杆d5-24;护肢连杆c5-25;护肢连杆d5-26;连杆n5-27;连杆o5-28;连杆p5-29;连杆q5-30;连杆r5-31;连杆固定板b5-32;z型固定块5-33;第二上肢固定总成6;ct床支撑座7;支撑总成7-1;螺杆7-2;方管轨道a7-3;方管轨道b7-4;床板7-5;ct机8;ct机8-1;ct机底座8-2;轨道轮8-3。
具体实施方式
29.下面结合附图对本发明作进一步详细说明。
30.本装置中所述的固定连接是指通过焊接、螺纹固定等方式进行固定,结合不同的使用环境,使用不同的固定方式,所述的转动连接是指通过将轴承烘装在轴上,轴或轴孔上设置有弹簧挡圈槽,通过将弹性挡圈卡在挡圈槽内实现轴承的轴向固定,实现转动,或齿轮之间的啮合转动。
31.具体实施方式一:
32.下面结合图1-10说明本实施方式,一种3d成像的ct图像设备,包括第一电机控制总成1、第二电机控制总成2、第一下肢固定总成3、第二下肢固定总成4、第一上肢固定总成5、第二上肢固定总成6、ct床支撑座7、ct机8,第一电机控制总成1、第二电机控制总成2、第一下肢固定总成3、第二下肢固定总成4、第一上肢固定总成5、第二上肢固定总成6、ct机8均与ct床支撑座7相连接,第一下肢固定总成3通过第二电机控制总成2与第二下肢固定总成4相连接,第一上肢固定总成5通过第二电机控制总成2与第二上肢固定总成6相连接。
33.具体实施方式二:
34.下面结合图1-10说明本实施方式,本实施方式对实施方式一作进一步说明,所述第一电机控制总成1包括电机a1-1、联轴器a1-2、异形连杆轴a1-3、齿轮座1-4、异形连杆轴b1-5、齿轮a1-6、齿轮b1-7、连接块a1-8、异形连杆轴c1-9、轴固定座a1-10、涡轮a1-11、蜗杆轴a1-12、轴固定座b1-13、齿轮c1-14、齿轮d1-15、轴a1-16、轴固定座c1-17、异形连杆a1-18、滚轮a1-19、滚轮b1-20、异形连杆b1-21、轴固定座d1-22、支撑底座a1-23、带轴带轮a1-24、皮带a1-25、带轮a1-26,电机a1-1通过其输出轴与联轴器a1-2固定连接,联轴器a1-2与异形连杆轴a1-3固定连接,异形连杆轴a1-3与齿轮座1-4转动连接,异形连杆轴a1-3与异形连杆轴b1-5转动连接,齿轮a1-6、齿轮b1-7均与齿轮座1-4啮合连接,异形连杆轴b1-5与齿
轮a1-6、齿轮b1-7转动连接,异形连杆轴b1-5与连接块a1-8固定连接,异形连杆轴c1-9与轴固定座a1-10转动连接,连接块a1-8与异形连杆轴c1-9转动连接,异形连杆轴c1-9与涡轮a1-11转动连接,涡轮a1-11与蜗杆轴a1-12啮合连接,蜗杆轴a1-12、轴a1-16均与轴固定座b1-13转动连接,蜗杆轴a1-12与齿轮c1-14固定连接,齿轮c1-14与齿轮d1-15啮合连接,齿轮d1-15与z轴a1-16固定连接,轴a1-16与轴固定座c1-17转动连接,轴a1-16与异形连杆a1-18固定连接,异形连杆a1-18与滚轮a1-19、滚轮b1-20转动连接,滚轮a1-19、滚轮b1-20均与异形连杆b1-21连接,支撑底座a1-23与带轴带轮a1-24固定连接,带轴带轮a1-24通过皮带a1-25与带轮a1-26转动连接。
35.具体实施方式三:
36.下面结合图1-10说明本实施方式,本实施方式对实施方式一作进一步说明,所述第二电机控制总成2包括电机b2-1、联轴器b2-2、轴b2-3、伞齿轮a2-4、伞齿轮b2-5、轴c2-6、轴固定座e2-7、齿轮e2-8、轴套a2-9、异形连杆轴d2-10、齿轮f2-11、轴固定销2-12、齿轮g2-13、轴固定座f2-14、轴套b2-15、轴固定座g2-16、轴d2-17、伞齿轮c2-18、伞齿轮d2-19、伞齿轮e2-20、轴固定座h2-21、轴固定座i2-22、涡轮b2-23、蜗杆b2-24、齿轮g2-25、齿轮h2-26、轴e2-27、伞齿轮f2-28、齿轮i2-29、齿轮j2-30、轴f2-31、伞齿轮g2-32,电机b2-1其输出轴通过联轴器b2-2与轴b2-3固定连接,轴b2-3与伞齿轮a固定连接2-4,伞齿轮a2-4与伞齿轮b2-5啮合连接,伞齿轮b2-5与轴c2-6固定连接,轴c2-6与轴固定座e2-7、异形连杆轴d2-10转动连接,轴c2-6与齿轮e2-8、轴套a2-9固定连接,异形连杆轴d2-10与齿轮f2-11转动连接,齿轮f2-11与轴固定销2-12转动连接,齿轮e2-8、齿轮g2-13均与齿轮f2-11啮合连接,齿轮g2-13与轴c2-6固定连接,轴固定座f2-14、轴套b2-15均与轴c2-6转动连接,伞齿轮e2-20、固定座h2-21、涡轮b2-23均与轴c2-6固定连接,伞齿轮c2-18、伞齿轮d2-19均与伞齿轮e2-20啮合连接,伞齿轮c2-18、伞齿轮d2-19均与轴d2-17固定连接,轴固定座g2-16与轴d2-17转动连接,涡轮b2-23与蜗杆b2-24啮合连接,轴固定座i2-22与蜗杆b2-24转动连接,齿轮g2-25、齿轮i2-29均与蜗杆b2-24固定连接,齿轮g2-25与齿轮h2-26啮合连接,齿轮h2-26、伞齿轮f2-28均与轴e2-27固定连接,齿轮i2-29与齿轮j2-30啮合连接,齿轮j2-30、伞齿轮g2-32均与轴f2-31固定连接。
37.具体实施方式四:
38.下面结合图1-10说明本实施方式,本实施方式对实施方式一作进一步说明,所述第一下肢固定总成3包括带轴联轴器3-1、齿轮k3-2、齿轮l3-3、轴g3-4、曲柄a3-5、连杆a3-6、曲柄b3-7、连杆b3-8、异形连杆c3-9、滑块轴a3-10、滑块a3-11、支撑底座b3-12、带轴齿条a3-13、齿轮m3-14、轴h3-15、轴固定座j3-16、带轮b3-17、皮带b3-18、带轮c3-19、轴i3-20、伞齿轮h3-21、伞齿轮i3-22、轴j3-23、齿轮n3-24、连杆固定板a3-25、带齿连杆a3-26、轴k3-27、连杆c3-28、轴l3-29、带齿连杆b3-30、连杆d3-31、连杆e3-32、连杆f3-33、连杆g3-34、连杆h3-35、护肢连杆a3-36、护肢连杆b3-37,带轴联轴器3-1通过其输出轴与齿轮k3-2固定连接,齿轮k3-2与齿轮l3-3啮合连接,带轴联轴器3-1、轴g3-4均与支撑底座b3-12转动连接,曲柄a3-5、曲柄b3-7均与轴g3-4固定连接,曲柄a3-5通过连杆a3-6与异形连杆c3-9转动连接,曲柄b3-7通过连杆b3-8与异形连杆c3-9转动连接,异形连杆c3-9通过滑块轴a3-10与滑块a3-11转动连接,滑块a3-11与支撑底座b3-12连接,滑块a3-11与带轴齿条a3-13固定连接,带轴齿条a3-13与齿轮m3-14啮合连接,齿轮m3-14、带轮b3-17均与轴h3-15固定连接,轴
h3-15与轴固定座j3-16转动连接,带轮b3-17通过皮带b3-18与带轮c3-19转动连接,带轮c3-19、伞齿轮h3-21均与轴i3-20固定连接,伞齿轮h3-21与伞齿轮i3-22啮合连接,伞齿轮i3-22、齿轮n3-24均与轴j3-23固定连接,轴k3-27、轴l3-29均与连杆固定板a3-25转动连接,带齿连杆a3-26与轴k3-27固定连接,轴l3-29与带齿连杆b3-30固定连接,带齿连杆a3-26与带齿连杆b3-30啮合连接,护肢连杆a3-36通过带齿连杆a3-26、连杆c3-28、连杆g3-34、连杆h3-35与连杆固定板a3-25转动连接,护肢连杆b3-37通过带齿连杆b3-30、连杆d3-31、连杆e3-32、连杆f3-33与连杆固定板a3-25转动连接。
39.具体实施方式五:
40.下面结合图1-10说明本实施方式,本实施方式对实施方式一作进一步说明,所述第二下肢固定总成4所含部件均与第一下肢固定总成3相同,其装配方式、顺序均与第一下肢固定总成3相同,其运行顺序、实现功能均与第一下肢固定总成3相同。
41.具体实施方式六:
42.下面结合图1-10说明本实施方式,本实施方式对实施方式一作进一步说明,所述第一上肢固定总成5包括伞齿轮j5-1、异形连杆轴e5-2、齿轮o5-3、齿轮p5-4、异形连杆轴f5-5、连杆i5-6、连杆j5-7、连杆k5-8、连杆l5-9、连杆m5-10、异形连杆轴g5-11、异形连杆d5-12、带轴齿条b5-13、支撑底座c5-14、轴固定座k5-15、齿轮q5-16、轴m5-17、伞齿轮j5-18、伞齿轮k5-19、轴n5-20、轴套c5-21、齿轮r5-22、带齿连杆c5-23、带齿连杆d5-24、护肢连杆c5-25、护肢连杆d5-26、连杆n5-27、连杆o5-28、连杆p5-29、连杆q5-30、连杆r5-31、连杆固定板b5-32、z型固定块5-33,伞齿轮j5-1、齿轮o5-3均与异形连杆轴e5-2固定连接,齿轮o5-3与齿轮p5-4啮合连接,齿轮p5-4与异形连杆轴f5-5固定连接,异形连杆轴f5-5通过连杆j5-7与连杆k5-8转动连接,异形连杆轴e5-2通过连杆l5-9与连杆k5-8转动连接,异形连杆轴f5-5通过连杆i5-6与异形连杆d5-12转动连接,异形连杆轴e5-2通过连杆m5-10与异形连杆d5-12转动连接,异形连杆d5-12与支撑底座c5-14连接,异形连杆轴g5-11与连杆k5-8转动连接,异形连杆d5-12与带轴齿条b5-13连接,带轴齿条b5-13与齿轮q5-16啮合连接,齿轮q5-16、伞齿轮j5-18均与轴m5-17固定连接,轴m5-17与轴固定座k5-15转动连接,伞齿轮j5-18与伞齿轮k5-19啮合连接,伞齿轮k5-19、齿轮r5-22均与轴n5-20固定连接,轴n5-20与轴套c5-21转动连接,连杆固定板b5-32与z型固定块5-33固定连接,护肢连杆c5-25通过带齿连杆c5-23、护肢连杆d5-26、连杆n5-27、连杆o5-28与连杆固定板b5-32转动连接,护肢连杆d5-26通过带齿连杆d5-24、连杆p5-29、连杆q5-30、连杆r5-31与连杆固定板b5-32转动连接。
43.具体实施方式七:
44.下面结合图1-10说明本实施方式,本实施方式对实施方式一作进一步说明,所述第二上肢固定总成6所含部件均与第一上肢固定总成5相同,其装配方式、顺序均与第一上肢固定总成5相同,其运行顺序、实现功能均与第一上肢固定总成5相同。
45.具体实施方式八:
46.下面结合图1-10说明本实施方式,本实施方式对实施方式一作进一步说明,所述ct床支撑座7包括支撑总成7-1、螺杆7-2、方管轨道a7-3、方管轨道b7-4、床板7-5,支撑总成7-1与螺杆7-2转动连接,方管轨道a7-3、方管轨道b7-4均与支撑总成7-1固定连接,床板7-5与支撑总成7-1固定连接。
47.具体实施方式九:
48.下面结合图1-10说明本实施方式,本实施方式对实施方式一作进一步说明,所述ct机8包括ct机8-1、ct机底座8-2、轨道轮8-3,ct机8-1与ct机底座8-2固定连接,ct机底座8-2与轨道轮8-3转动连接。
49.本发明的一种3d成像的ct图像设备,其工作原理为:电机a1-1启动,其输出轴通过联轴器a1-2带动异形连杆轴a1-3转动,异形连杆轴a1-3带动齿轮a1-6、齿轮b1-7沿齿轮座1-4啮合转动,异形连杆轴a1-3通过异形连杆轴b1-5、连接块a1-8带动异形连杆轴c1-9转动,异形连杆轴c1-9带动涡轮a1-11转动,涡轮a1-11带动蜗杆轴a1-12转动,蜗杆轴a1-12通过齿轮c1-14带动齿轮d1-15转动,齿轮d1-15通过轴a1-16带动异形连杆a1-18转动,异形连杆a1-18通过滚轮a1-19、滚轮b1-20带动异形连杆b1-21转动,异形连杆b1-21带动带轴带轮a1-24转动,带轴带轮a1-24通过皮带a1-25带动带轮a1-26转动,带轮a1-26通过螺杆7-2带动ct机8-1沿方管轨道a7-3、方管轨道b7-4运动。随后电机b2-1启动,其输出轴通过联轴器b2-2、轴b2-3带动伞齿轮a2-4转动,伞齿轮a2-4带动伞齿轮b2-5转动,伞齿轮b2-5通过轴套a2-9、异形连杆轴d2-10带动齿轮f2-11转动,齿轮f2-11通过齿轮g2-13带动轴c2-6转动,轴c2-6带动伞齿轮e2-20转动,伞齿轮e2-20带动伞齿轮c2-18、伞齿轮d2-19转动,轴c2-6通过涡轮b2-23带动蜗杆b2-24转动,蜗杆b2-24带动齿轮g2-25、齿轮i2-29转动,齿轮g2-25通过齿轮h2-26、轴e2-27带动伞齿轮f2-28转动,齿轮i2-29通过齿轮j2-30、轴f2-31带动伞齿轮g2-32转动。伞齿轮d2-19通过轴d2-17带动带轴联轴器3-1转动,带轴联轴器3-1通过齿轮k3-2带动齿轮l3-3转动,齿轮l3-3通过轴g3-4带动曲柄a3-5、曲柄b3-7转动,曲柄a3-5通过连杆a3-6带动异形连杆c3-9运动,曲柄b3-7通过连杆b3-8带动异形连杆c3-9运动,异形连杆c3-9通过滑块轴a3-10带动滑块a3-11沿支撑底座b3-12滑动,滑块a3-11通过带轴齿条a3-13带动齿轮m3-14转动,齿轮m3-14通过轴h3-15带动带轮b3-17转动,带轮b3-17通过皮带b3-18带动带轮c3-19转动,带轮c3-19通过伞齿轮h3-21带动伞齿轮i3-22转动,伞齿轮i3-22通过轴j3-23带动齿轮n3-24转动,齿轮n3-24通过带齿连杆a3-26带动带齿连杆b3-30转动,连杆固定板a3-25通过带齿连杆b3-30、连杆d3-31、连杆e3-32、连杆f3-33带动护肢连杆b3-37转动,连杆固定板a3-25通过带齿连杆a3-26、连杆c3-28、连杆g3-34、连杆h3-35带动护肢连杆a3-36转动,护肢连杆a3-36、护肢连杆b3-37转动实现护肢连杆向内夹紧,实现固定下肢的功能。伞齿轮g2-32通过伞齿轮j5-1带动异形连杆轴e5-2转动,异形连杆轴e5-2通过齿轮o5-3带动齿轮p5-4转动,异形连杆轴e5-2带动连杆l5-9、连杆m5-10转动,异形连杆轴f5-5带动连杆i5-6、连杆j5-7转动,连杆j5-7、连杆l5-9带动异形连杆轴g5-11沿异形连杆d5-12运动,连杆轴g5-11通过带轴齿条b5-13带动齿轮q5-16转动,齿轮q5-16通过轴m5-17带动伞齿轮j5-18转动,伞齿轮j5-18通过伞齿轮k5-19、轴n5-20带动齿轮r5-22转动,齿轮r5-22通过带齿连杆c5-23带动带齿连杆d5-24转动,连杆固定板b5-32通过带齿连杆c5-23、连杆n5-27、连杆o5-28带动护肢连杆c5-25转动连接,连杆固定板b5-32通过带齿连杆d5-24、连杆p5-29、连杆q5-30、连杆r5-31带动护肢连杆d5-26转动连接。护肢连杆c5-25、护肢连杆d5-26的转动,实现了护肢连杆向内夹紧,实现固定上肢的功能。
50.当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1