一种立起助力下肢外骨骼机器人
1.本发明属于下肢助力和康复机器人领域,特别涉及一种立起助力下肢外骨骼机器人。
背景技术:
2.随着人口老龄化问题的进一步加剧,以及我国患有中风、帕金森等疾病的患者数量基数庞大,同时,患有肢体运动障碍的残疾人也不在少数,这类患者只能依靠轮椅进行日常活动。这些相关人员数量的叠加,导致需要下肢行动助力和康复的需求大幅增加;现有的下肢助力和康复外骨骼机器人主要针对穿戴者的自助自主步行、奔跑等活动能力进行研究与控制设计,结构和控制较为复杂、可靠性不高等;因此,首先需要设计一种在立起过程中可以助力的下肢外骨骼机器人,能够使穿戴者逐步恢复下肢肌肉与骨骼活性;体现出极大的优势是结构紧凑、占用空间小、外形尺寸小、工作时稳定性好、可靠性安全性高并降低了自重和成本。
技术实现要素:
3.本发明的目的在于针对现有技术和用户体验感以及经济成本过高等方面的不足,提供一种立起助力下肢外骨骼机器人,通过采用液压摆动缸对髋关节进行驱动来实现关节的旋转运动,具备了最大可以实现360
°
的旋转动作的能力,但是根据穿戴者穿戴使用时候的实际需要,旋转动作的角度可以被限制在
±
90
°
以内,其优势是占用空间小、外形尺寸小、稳定性好、可靠性安全性高并降低了自重和成本。并且通过采用智能控制器对膝关节的电液伺服阀输入信号进行调节来校正液压直线缸的活塞杆位移,实现在立起过程中、两腿可移动部位的位置同步控制精度提高的目的,并极大的提高了人机交互的舒适性和用户体验感。
4.本发明涉及的是一种立起助力下肢外骨骼机器人,其特征是:背架(1)、液压摆动缸(2)、法兰盘(3)、髋关节电液伺服阀(4)、大腿杆(501)、大腿杆(502)、小腿杆(601)、小腿杆(602)、液压直线缸(701)、液压直线缸(702)、活塞杆(801)、活塞杆(802)、位移传感器(901)、位移传感器(902)、膝关节电液伺服阀(101)、膝关节电液伺服阀(102)、脚底机构(11)、减震器(12)、油箱(13)、油泵(14)、电机(15)、压力表(16)、溢流阀(17);所述下肢外骨骼机器人分为左右两个单元,使用时分别和使用者的左右下肢固联,下肢外骨骼机器人的左右两个单元关于背架(1)的中心轴为左右轴对称分布。
5.其中,液压摆动缸(2)固定在背架(1)上;液压摆动缸(2)与大腿杆(501)通过法兰盘(4)进行固定;大腿杆(501)与小腿杆(601)铰链连接;活塞杆(801)位于液压直线缸(701)中,活塞杆(802)位于液压直线缸(702)中;位移传感器(901)位于活塞杆(801)上,位移传感器(902)位于活塞杆(802)上;小腿杆(601)与脚底机构(11)相连接;另一个单元的联接形式与次单元的联接形式对应相同;当位移传感器(901)和位移传感器(902)分别检测到活塞杆(801)和活塞杆(802)的位移后将反馈信号传输给控制器,控制器进而控制膝关节电液伺服
阀(101)和膝关节电液伺服阀(102)的输入信号;油泵(14)的进油口将油管接入油箱(13)中,将所述油箱(13)中的液压油作为输入液压油加压后输送至髋关节电液伺服阀(3)、膝关节电液伺服阀(101)、膝关节电液伺服阀(102)中;髋关节电液伺服阀(4)的输出液压油作为液压摆动缸(2)的输入液压油;膝关节电液伺服阀(101)的输出液压油作为液压直线缸(701)的输入液压油,膝关节电液伺服阀(102)的输出液压油作为液压直线缸(702)的输入液压油;液压摆动缸(2)的进油腔在进油后带动大腿杆(501)进行旋转;液压直线缸(701)的进油腔在进油后推动活塞杆(801)进行直线伸出或缩回或实现往复位移,液压直线缸(702)的进油腔在进油后推动活塞杆(802)进行直线伸出或缩回或实现往复位移。
6.所述的一种立起助力下肢外骨骼机器人,其特征在于:立起过程中髋关节所需的转动角度较大,通过液压摆动缸(2)进油后直接带动大腿杆(501)进行旋转,具备了最大可以实现360
°
的旋转动作的能力,但是根据穿戴者穿戴使用时候的实际需要,旋转动作的角度可以被限制在
±
90
°
以内,所以体现出它的优势是占用空间小、外形尺寸小、稳定性好、可靠性安全性高并降低了自重和成本。
7.所述的一种立起助力下肢外骨骼机器人,其特征在于:膝关节部位采用了高精度位移传感器,并研究设计采用了智能位移反馈补偿控制原理的控制方法,当穿戴者立起时活塞杆(801)和活塞杆(802)产生了实际位移后,高精度位移传感器(901)和位移高精度传感器(902)检测到变化的位移量、并将两个反馈信号传输给控制器;控制器对两个反馈信号进行智能算法策略控制之后,对膝关节电液伺服阀(101)和膝关节电液伺服阀(102)的输入实时控制信号进行实时智能补偿控制,实现在立起过程中、两腿可移动部位的位置同步控制精度提高的目的,并极大的提高了人机交互的舒适性和用户体验感。膝关节部位动态模型公式如下所示:公式一:公式二:公式三:公式四:公式五:公式六:其中,公式一中,为控制电流,为放大器增益,为输入电压,为反馈电压;公式二中,为伺服阀的阀芯位移量,为电液伺服阀增益,为伺服阀的传递函数;公式三中,为伺服阀的输出流量,为伺服阀的流量增益,为伺服阀的压力增益,为负载压力;公式四中,为无杆腔活塞有效面积,为活塞杆的位移,为液压缸的附加泄露系数,为液压缸的等效泄漏系数,为系统压力,为液压缸的等效体积,为有效体积弹性模量,为有杆腔活塞有效面积与无杆腔活塞有效面积之比;公式五中,为活塞杆及其负载折算到活塞杆上的总质量,为活塞杆粘性的阻尼系数,为负载刚度,为
作用到活塞上的任意外力;公式六中,为两活塞杆位移量差值的一半所转换成的压力差,为位移传感器增益。
附图说明
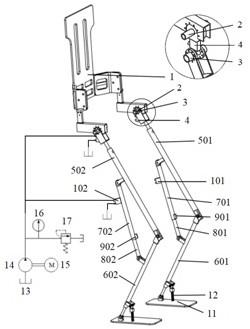
8.图1为本发明一种立起助力下肢外骨骼机器人的基本组成示意图。
9.图2为本发明一种立起助力下肢外骨骼机器人的髋关节组成示意图。
10.图3为本发明一种立起助力下肢外骨骼机器人的智能控制方法原理图。
11.图4为本发明一种立起助力下肢外骨骼机器人的两通道平衡算法逻辑图。
12.图5为本发明一种立起助力下肢外骨骼机器人的控制方框图。
具体实施方式
13.下面结合附图,对本发明提供的一种助力立起的下肢外骨骼机器人进行细说。
14.图1为一种助力立起的下肢外骨骼机器人的基本组成示意图,其中包括:背架(1)、液压摆动缸(2)、法兰盘(3)、髋关节电液伺服阀(4)、大腿杆(501)、大腿杆(502)、小腿杆(601)、小腿杆(602)、液压直线缸(701)、液压直线缸(702)、活塞杆(801)、活塞杆(802)、位移传感器(901)、位移传感器(902)、膝关节电液伺服阀(101)、膝关节电液伺服阀(102)、脚底机构(11)、减震器(12)、油箱(13)、油泵(14)、电机(15)、压力表(16)、溢流阀(17);所述下肢外骨骼机器人分为左右两个单元,使用时分别和使用者的左右下肢固联,下肢外骨骼机器人的左右两个单元关于背架(1)的中心轴为左右轴对称分布。
15.液压摆动缸(2)固定在背架(1)上;液压摆动缸(2)与大腿杆(501)通过法兰盘(4)进行固定;大腿杆(501)与小腿杆(601)铰链连接;活塞杆(801)位于液压直线缸(701)中,活塞杆(802)位于液压直线缸(702)中;位移传感器(901)位于活塞杆(801)上,位移传感器(902)位于活塞杆(802)上;小腿杆(601)与脚底机构(11)相连接;另一个单元的联接形式与次单元的联接形式对应相同;当位移传感器(901)和位移传感器(902)分别检测到活塞杆(801)和活塞杆(802)的位移后将反馈信号传输给控制器,控制器进而控制膝关节电液伺服阀(101)和膝关节电液伺服阀(102)的输入信号;油泵(14)的进油口将油管接入油箱(13)中,将所述油箱(13)中的液压油作为输入液压油加压后输送至髋关节电液伺服阀(3)、膝关节电液伺服阀(101)、膝关节电液伺服阀(102)中;髋关节电液伺服阀(4)的输出液压油作为液压摆动缸(2)的输入液压油;膝关节电液伺服阀(101)的输出液压油作为液压直线缸(701)的输入液压油,膝关节电液伺服阀(102)的输出液压油作为液压直线缸(702)的输入液压油;液压摆动缸(2)的进油腔在进油后带动大腿杆(501)进行旋转;液压直线缸(701)的进油腔在进油后推动活塞杆(801)进行直线伸出或缩回或实现往复位移,液压直线缸(702)的进油腔在进油后推动活塞杆(802)进行直线伸出或缩回或实现往复位移。
16.图2为一种立起助力下肢外骨骼机器人的髋关节组成示意图,其中包括:背架(1)、液压摆动缸(2)、法兰盘(3)、髋关节电液伺服阀(4)、大腿杆(5);背架(1)与液压摆动缸(2)通过设计预留的螺栓孔进行固定连接;液压摆动缸(2)与髋关节电液伺服阀(4)结构固定,为缸阀一体化结构,减少油路的连接管道和能量损耗;液压摆动缸(2)与法兰盘(3)进行固定连接,使得液压摆动缸(2)与回转体实现共同回转,运动更稳定安全;液压摆动缸(2)与大
腿杆(5)通过法兰盘(3)进行固定连接,实现液压摆动缸(2)直接带动大腿杆(5)作旋转运动的目的,与传统驱动方式相比,具备了最大可以实现360
°
的旋转动作的能力,但是根据穿戴者穿戴使用时候的实际需要,旋转动作的角度可以被限制在
±
90
°
以内,所以体现出它的优势是占用空间小、外形尺寸小、稳定性好、可靠性安全性高并降低了自重和成本。
17.图3为一种立起助力下肢外骨骼机器人的智能控制方法原理图,当穿戴者立起时液压直线缸产生了实际位移后,高精度位移传感器检测到变化的位移量、并将两个反馈信号传输给智能控制器;智能控制器对两个反馈信号进行智能算法策略控制之后,对膝关节电液伺服阀(101)和膝关节电液伺服阀(102)的输入实时控制信号进行实时智能补偿控制。
18.图4为本发明一种立起助力下肢外骨骼机器人的两通道平衡算法逻辑图,两通道平衡算法的具体操作为:对输入的两个变量以此进行变量相加取均值、均值与原值做差、差值取负转换单位,最后输出变量给执行机构;此操作仅为两通道平衡算法的一种实施案例。
19.图5为一种立起助力下肢外骨骼机器人的控制方框图,控制器接收到的位移反馈信号进行的运算方式为:两各位移反馈信号进行相加并取平均值,再分别与对应的原位移反馈信号相比较,平均值若大于原位移反馈信号的数值,则将控制器输出信号以负数的形式输入给膝关节电液伺服阀,从而减小对应活塞杆的位移;平均值若小于原位移反馈信号的数值,则将控制器输出信号以正数的形式输入给膝关节电液伺服阀,从而增加对应活塞杆的位移。采用实时智能补偿控制,实现在立起过程中、两腿可移动部位的位置同步控制精度提高的目的,并极大的提高了人机交互的舒适性和用户体验感。
20.综上所述,发明了一种助力立起的下肢外骨骼机器人,能够直接驱动髋关节旋转运动,其优势是增大髋关节的转动角度、占用空间小、外形尺寸小、稳定性好、可靠性安全性高并降低了自重和成本;设计的智能控制方法能够实现在立起过程中、两腿可移动部位的位置同步控制精度提高的目的,并极大的提高了人机交互的舒适性和用户体验感。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1