一种站立式爬楼梯装置的制作方法
本发明涉及机器人,具体涉及一种站立式爬楼梯装置。
背景技术:
1、目前人们出行场景中,有很多需要上下楼梯的地方,对于行动障碍者来说是很不方便的,而很多楼梯处也没有设置电梯,使得行动障碍者无法上下楼梯,对他们的出行造成重大阻碍。
2、申请号是201710491511.1,公开日是2018年12月28日的中国发明专利申请《一种阶梯通过装置》,公开了一种阶梯通过装置,包括支撑架,所述支撑架连接轨道,所述的轨道连接另一支撑架。两个支撑架通过轨道可在相对滑动。同时,有伸缩杆固定在支撑架上,伸缩杆可根据位置需要调节杆的长度。该申请文本是申请人本人的在先申请。该专利需要进一步优化在于:驱动装置直接驱动伸缩杆移动,所需要的驱动装置数量较多,且驱动装置驱动不同伸缩杆的位移较难统一,容易出现伸缩杆位移不一致的情形。此外,由于直接驱动伸缩杆,该装置重心不稳,极易摔倒。
3、申请号是201310285367.8,公开日是2013年10月23日的中国发明专利申请《全方位水平姿态爬楼机器人及零半径转向、爬楼方法》,公开了一种全方位水平姿态爬楼机器人,包括下台面及位于其上方的上台面,在下台面的下方设有带动其升降的至少两组下台面升降机构,在上台面的下方设有带动其升降的至少四组上台面升降机构,其特征在于:下台面与上台面在水平方向上前后错开,在下台面与上台面之间设有支撑转动板,支撑转动板底部设有直线移动单元,直线移动单元的底部设于下台面上,在上台面上设有转动机构,转动机构与支撑转动板固定连接。该装置的不足在于:控制机构直接驱动相应支撑转动板,容易造成装置重心不稳,甚至摔倒。
4、申请号是202011464142.5,公开日是2021年4月6日的中国发明专利申请《站立式爬楼梯装置及利用该装置上下楼梯的方法》,公开了一种站立式爬楼梯装置,包括车体、平移装置、升降装置、电控磁力吸盘、地面吸盘装置、摆杆平衡机构、舵机、摇杆、平衡杆、铁质板、地面铁质板;2组电控磁力吸盘在平移装置和升降装置组合运动驱使下交替与各台阶立面的铁质板吸附,从而可以带动车体实现攀爬楼梯动作。该装置主要使用电磁驱动装置,装置结构复杂,容易摔倒。
技术实现思路
1、本发明为了解决现有技术的不足,提供了一种站立式爬楼梯装置。
2、本发明的技术方案如下:
3、一种站立式爬楼梯装置,包括内框架、外框架、连接板和驱动组件,所述外框架设置在所述内框架的两侧;所述连接板包括横向连接板和竖向连接板,所述横向连接板和竖向连接板固定连接,所述横向连接板上固定设置有水平导轨,所述竖向连接板上固定设置有竖直导轨;所述驱动组件可分别驱动内框架沿水平导轨、外框架沿竖直导轨移动;所述竖向连接板底部设置有用于站立的脚踏。
4、优选的,所述驱动组件包括横向伸缩连杆、驱动机构、第一传动杆、第二传动杆以及换向装置;所述横向伸缩连杆固定设置在横向连接板上方;所述驱动机构的两端分别设置有第一传动杆,所述第一传动杆的另一端连接有换向装置,换向装置竖直方向设置有第二传动杆,第二传动杆与竖向连接板相连。
5、优选的,所述第二传动杆是伸缩组件,所述伸缩组件可以是机械伸缩装置、电动伸缩装置、气动伸缩装置、液压伸缩装置中的一种。
6、优选的,所述第一传动杆可以是六角轴或八角轴或圆轴。
7、优选的,所述驱动机构可以是电动装置、气动装置、液压油缸、手动驱动装置中的一种或多种。
8、优选的,所述外框架和/或内框架底部还设置有轮子。
9、优选的,所述内框架的底部还设置有伸缩腿1,所述伸缩腿1内设置有复位机构。
10、优选的,所述装置底部还设置有传感控制器,包括竖直传感控制器和水平传感控制器,所述竖直传感控制器使得伸缩腿伸缩的距离恰好达到地面或台阶面,所述水平传感控制器使得外框架和/或内框架在水平方向移动的距离恰好移动到接下来的台阶面上。
11、优选的,所述传感控制器可以是激光传感控制器、红外传感控制器、电波传感控制器、图像分析传感控制器、机械开关、光电开关中的一种或多种。
12、本发明的有益效果是:
13、本发明可以分别驱动内框架和外框架在相应导轨上移动,而不是现有技术中采用的单独驱动各个伸缩腿,使得装置重心降低,进一步减小装置摔倒的风险。
技术特征:
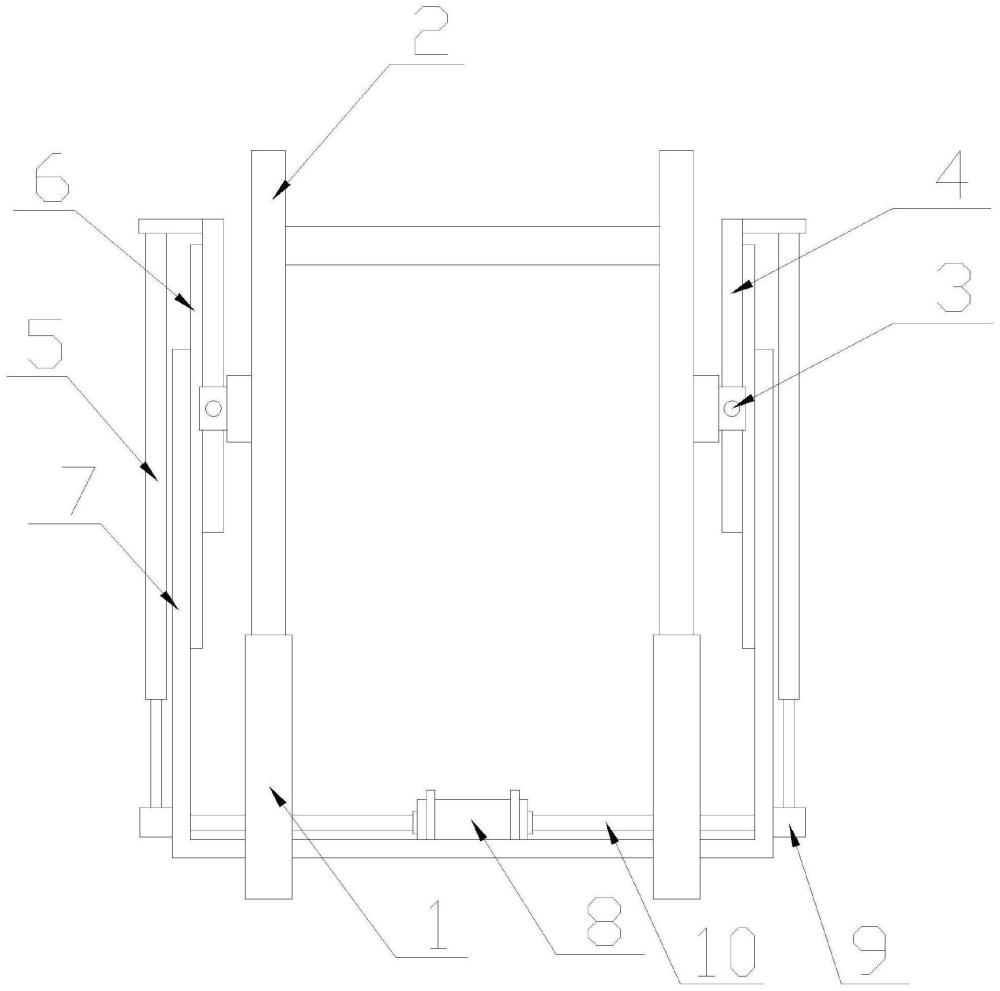
1.一种站立式爬楼梯装置,其特征在于,包括内框架(2)、外框架(7)、连接板(4)和驱动组件,所述外框架(7)设置在所述内框架(2)的两侧;所述连接板(4)包括横向连接板和竖向连接板,所述横向连接板和竖向连接板固定连接,所述横向连接板上固定设置有水平导轨(3),所述竖向连接板上固定设置有竖直导轨(6);所述驱动组件可分别驱动内框架(2)沿水平导轨(3)、外框架(7)沿竖直导轨(6)移动;所述竖向连接板底部设置有用于站立的脚踏。
2.根据权利要求1所述的站立式爬楼梯装置,其特征在于,所述驱动组件包括横向伸缩连杆、驱动机构(8)、第一传动杆(10)、第二传动杆(5)以及换向装置(9);所述横向伸缩连杆固定设置在横向连接板上方;所述驱动机构(8)的两端分别设置有第一传动杆(10),所述第一传动杆(10)的另一端连接有换向装置(9),换向装置(9)竖直方向设置有第二传动杆(5),第二传动杆(5)与竖向连接板相连。
3.根据权利要求2所述的站立式爬楼梯装置,其特征在于,所述第二传动杆(5)是伸缩组件,所述伸缩组件可以是机械伸缩装置、电动伸缩装置、气动伸缩装置、液压伸缩装置中的一种。
4.根据权利要求2所述的站立式爬楼梯装置,其特征在于,所述第一传动杆(10)可以是六角轴或八角轴或圆轴。
5.根据权利要求2所述的站立式爬楼梯装置,其特征在于,所述驱动机构(8)可以是电动装置、气动装置、液压油缸、手动驱动装置中的一种或多种。
6.根据权利要求1所述的站立式爬楼梯装置,其特征在于,所述外框架(7)和/或内框架(2)底部还设置有轮子。
7.根据权利要求1所述的站立式爬楼梯装置,其特征在于,所述内框架(2)的底部还设置有伸缩腿(1),所述伸缩腿(1)内设置有复位机构。
8.根据权利要求7所述的站立式爬楼梯装置,其特征在于,所述装置底部还设置有传感控制器,包括竖直传感控制器和水平传感控制器,所述竖直传感控制器使得伸缩腿(1)伸缩的距离恰好达到地面或台阶面,所述水平传感控制器使得外框架(7)和/或内框架(2)在水平方向移动的距离恰好移动到接下来的台阶面上。
9.根据权利要求8所述的站立式爬楼梯装置,其特征在于,所述传感控制器可以是激光传感控制器、红外传感控制器、电波传感控制器、图像分析传感控制器、机械开关、光电开关中的一种或多种。
技术总结
一种站立式爬楼梯装置,包括内框架、外框架、连接板和驱动组件,所述外框架设置在所述内框架的两侧;所述连接板包括横向连接板和竖向连接板,所述横向连接板和竖向连接板固定连接,所述横向连接板上固定设置有水平导轨,所述竖向连接板上固定设置有竖直导轨;所述驱动组件可分别驱动内框架沿水平导轨、外框架沿竖直导轨移动;所述竖向连接板底部设置有用于站立的脚踏。本发明分别驱动内框架和外框架在相应导轨上移动,而不是现有技术中采用的单独驱动各个伸缩腿,使得装置重心降低,进一步减小装置摔倒的风险。
技术研发人员:高敏
受保护的技术使用者:高敏
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!