一种带有力矩调节装置的紧凑型主动假肢膝关节的制作方法
1.本发明涉及膝关节假肢技术领域,尤其涉及一种带有力矩调节装置的紧凑型主动假肢膝关节。
背景技术:
2.近年来,双足步行机器人已经成为机器人领域的热点。步行机器人不仅在医疗、助老助残等方面有广阔的应用场景,而且对于环境适应性好、运动协调能力强,还可以研究人类步行机理,以便于更好得进行假肢膝关节的研究,更好地服务于人类。
3.膝关节根据人类是否可以提供主动力矩可以分为主动型膝关节假肢、被动型膝关节假肢和主被动型膝关节假肢。其中,应用场合比较多的主动型膝关节假肢需要有动力源(电机)来为膝关节的屈曲和伸展的动作提供主要或全部力矩。因此,这种主动型膝关节假肢常常会因为电机需要提供较大的力矩,而被设计成较大体积和质量,并且造假很高,不易于大量投产流入市场而被消费者青睐。因此膝关节的进一步研究需要采用机构设计或控制的方法尽量减少电机的峰值力矩。
技术实现要素:
4.本发明目的在于针对现有技术的缺陷,提供一种带有力矩调节装置的紧凑型主动假肢膝关节,以调节关节驱动的力矩,使得峰值降低,而谷值提高,从而可以选择功率和最大扭矩更小的电机,减轻关节机构自重,节省能耗,或者使得假肢佩戴者驱动力矩减小,更加省力。
5.为解决上述技术问题,本发明提供技术方案如下:
6.一种带有力矩调节装置的紧凑型主动假肢膝关节,其特征在于:包括膝关节模块、接受腔连接块、小腿连接件、力矩调节装置,所述膝关节模块包括膝关节壳体、膝关节轴心、膝关节定子套筒端盖,所述力矩调节装置包括涡卷弹簧、折弯形弹簧槽,所述膝关节壳体为圆柱形结构,内部设置有电机,所述膝关节轴心设置于膝关节壳体的中心,所述膝关节定子套筒端盖设置在膝关节壳体两端并与膝关节轴心固定连接,所述电机的定子连接膝关节轴心,电机的转子连接膝关节壳体,所述接受腔连接块通过连接挂耳连接所述膝关节轴心,所述折弯形弹簧槽连接于所述膝关节定子套筒端盖靠近膝关节轴心的位置上,所述涡卷弹簧设置在膝关节定子套筒端盖上,其外端固定连接在连接挂耳上,内端固定连接在折弯形弹簧槽上,所述小腿连接件的一端固定连接在膝关节壳体上。
7.进一步的,所述膝关节定子套筒端盖上设置有若干定位挡板,所述定位挡板在所述涡卷弹簧弯曲受力时起到限位、提供变形空间的作用。
8.进一步的,所述力矩调节装置还包括弹簧盒盖板,所述弹簧盒盖板罩设在所述膝关节定子套筒端盖上。
9.进一步的,所述弹簧盒盖板为隐藏式结构。
10.进一步的,所述涡卷弹簧盘绕在所述膝关节定子套筒端盖上,其横截面为圆形。
11.进一步的,所述涡卷弹簧的两端通过轴孔的过渡配合分别连接于所述连接挂耳和折弯形弹簧槽上。
12.进一步的,所述接受腔连接块和连接挂耳之间设置有连接平键。
13.进一步的,所述膝关节壳体与小腿连接件之间为硬质连接。
14.与现有技术相比,本发明的有益效果是:
15.1、本发明中的力矩调节装置能够有效降低膝关节旋转电机的力矩峰值,同时还能够提高膝关节旋转力矩谷值,实现力矩辅助和调节,从而可以选择功率和最大扭矩较小的电机,减轻膝关节机构自重,节省能耗,使得假肢佩戴者驱动力矩减小,更加省力,易于穿戴。
16.2、采用涡卷弹簧作为力矩调节装置,可以根据佩戴者步行实验中电机正负峰值力矩差确定,通过确定峰值力矩发生点及幅值,设计弹簧的刚度、外径和线径等,从而适应不同的个体。
17.3、定位挡板在弹簧弯曲受力时起到限位的作用,维持稳定性和限定弹簧外廓,提供变形空间。
18.4、弹簧盒盖板有安装弹簧以及提供工作空间的作用,可以限制弹簧自由度,并且能够设计为隐藏式结构,起到遮挡和美观的效果,实现紧凑性。
附图说明
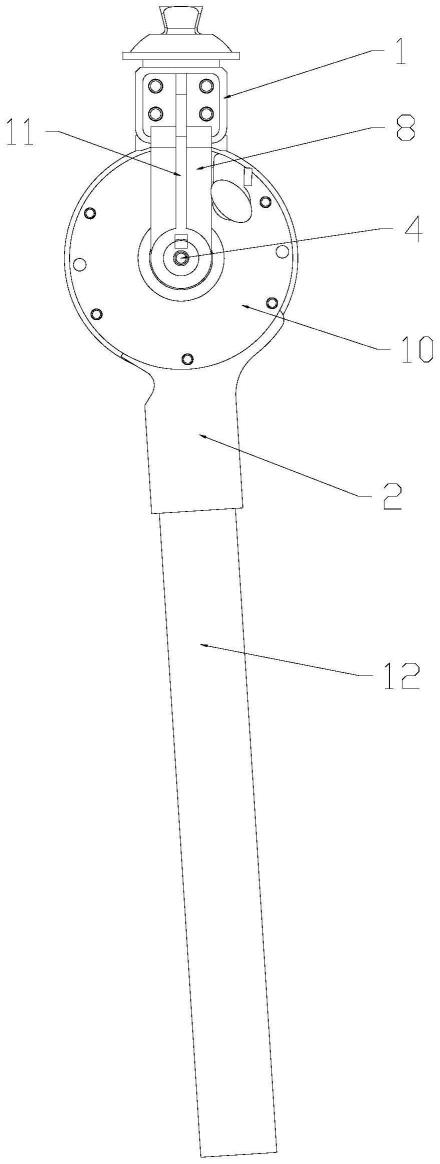
19.图1为本发明实施例整体结构示意图;
20.图2为本发明实施例力矩调节装置结构示意图;
21.图3为本发明实施例剖视图;
22.图4为本发明实施例涡卷弹簧结构示意图;
23.图5为本发明实施例工作原理图;
24.图6为假肢膝关节有无力矩调节装置时的驱动力矩对比图;
25.其中:1-接受腔连接块,2-小腿连接件,3-膝关节壳体,4-膝关节轴心,5-膝关节定子套筒端盖,6-涡卷弹簧,7-折弯形弹簧槽,8-连接挂耳,9-定位挡板,10-弹簧盒盖板,11-连接平键,12-小腿杆。
具体实施方式
26.为了加深本发明的理解,下面我们将结合附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
27.图1-4示出了一种带有力矩调节装置的紧凑型主动假肢膝关节的具体实施例,包括膝关节模块、接受腔连接块1、小腿连接件2、力矩调节装置,膝关节模块包括膝关节壳体3、膝关节轴心4、膝关节定子套筒端盖5,力矩调节装置包括涡卷弹簧6、折弯形弹簧槽7。膝关节壳体3为圆柱形结构,内部设置有电机,膝关节轴心4设置于膝关节壳体3的中心,膝关节定子套筒端盖5设置在膝关节壳体3两端并与膝关节轴心4固定连接,电机的定子连接膝关节轴心4,电机的转子连接膝关节壳体3,接受腔连接块1通过连接挂耳8连接膝关节轴心4,接受腔连接块1和连接挂耳8之间设置有连接平键11。折弯形弹簧槽7连接于膝关节定子套筒端盖5靠近膝关节轴心4的位置上,涡卷弹簧6设置在膝关节定子套筒端盖5上,其外端
固定连接在连接挂耳8上,内端固定连接在折弯形弹簧槽7上,小腿连接件2的一端固定连接在膝关节壳体3上,另一端连接小腿杆12。
28.优选的,依据涡卷弹簧6的形状和运动过程中的变形特点,膝关节定子套筒端盖5上设置有若干定位挡板9,涡卷弹簧6沿定位挡板9盘绕在膝关节定子套筒端盖5之上,定位挡板9在涡卷弹簧6弯曲受力时起到限位、维持稳定性和限定外廓、提供变形空间的作用。
29.力矩调节装置还包括弹簧盒盖板10,弹簧盒盖板10罩设在膝关节定子套筒端盖5上。弹簧盒盖板10和膝关节定子套筒端盖5之间形成一空间,容纳涡卷弹簧6的拉伸压缩形变,可以限制涡卷弹簧6在其他方向的自由度,防止涡卷弹簧6发生纵向位移而弹出误伤穿戴者或他人,并且能够设计为隐藏式结构,起到遮挡和美观的效果,实现紧凑性。
30.涡卷弹簧6应呈螺旋涡卷形,横截面为圆形。涡卷弹簧6的两端通过轴孔的过渡配合分别连接于连接挂耳8和折弯形弹簧槽7上。折弯形弹簧槽7能够配合弹簧盒盖板10限制涡卷弹簧6端部的平移和旋转自由度,能够保证涡卷弹簧6端部的有效固定。
31.膝关节壳体3与小腿连接件2之间为硬质连接。
32.上述实施例的工作原理如下:
33.根据研究,人体下肢在一个步态周期内根据足部是否着地可以分为摆动期和支撑期。当假肢佩戴者走路时,向前摆腿时,即摆动期开始时,小腿即将向前运动,在此时,膝关节壳体3相对于平衡位置转动了负角度,电机需要提供正转矩驱动膝关节壳体3和小腿杆12顺时针转动,因而带动涡卷弹簧6逐渐变为压缩状态,涡卷弹簧6可向外提供额外力矩帮助电机做正功进行摆腿;
34.如图5所示,首先是摆腿助力原理,屈膝时,涡卷弹簧6正处于压缩状态,提供伸展的助力矩。同样原理,蹲下时弹簧力矩可以平衡部分身体重力矩,缓冲蹲下过程。蹲起时涡卷弹簧6可以提供助力矩。
35.当小腿即将着地时,即摆动期即将结束时,小腿和足部即将落地,为避免较大的振动和碰撞,需要收腿,在此时,膝关节壳体3相对于平衡位置转动了正角度,电机需要提供负转矩驱动膝关节壳体3和小腿杆12逆时针转动,因而带动此时涡卷弹簧6逐渐变为拉伸状态,涡卷弹簧6可提供额外力矩帮助电机做负功进行制动来收腿,因此可以选择功率和最大扭矩较小的电机,节约能耗。
36.弹簧平衡位置的确定,需要依据使用者的步态和步速优化,如果是老年人或肌肉力量不足的人,需要将平衡位置点设计得更加靠近摆动期极限位置,甚至设计为极限位置。对于高速步行和低速步行,力矩峰值同样不同,需要根据使用者需求调节弹簧的平衡位置。
37.如图6所示,为假肢膝关节分别装有力矩调节装置和没有力矩调节装置时的驱动力矩对比图。从图中曲线对比可以明显看出力矩调节装置能够有效降低膝关节旋转电机的力矩峰值,同时还能够提高膝关节旋转力矩谷值,实现力矩辅助和调节。涡卷弹簧6的选择根据佩戴者步行实验实测的中电机正负峰值力矩差确定。通过确定峰值力矩发生点及幅值,设计涡卷弹簧6的刚度、外径和线径等。
38.上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所作的任何等效变化或修饰,均应落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1