一种主被动混合驱动的髋膝一体化智能假肢
本发明涉及人体康复辅具,尤其涉及一种主被动混合驱动的髋膝一体化智能假肢。
背景技术:
1、传统的机械下肢假肢系统多采用无动力关节阻尼调节设计,其所能够提供的关节力矩(主要是阻尼力矩)变化范围有限,不能满足正常行走时因力、速度、地形变化所需要的调整,因此导致穿戴者行走步态异常、运动安全性降低以及能量消耗增加。特别是现有的商业化髋离断假肢均为纯被动式机械假肢,截肢者在穿戴此类髋关节假肢的同时,还需要自行适配膝关节假肢及假脚,并且即使是有足够平衡能力及体力的患者,在佩戴此类假肢时所需能量代谢成本是正常人的2-3倍。大部分髋离断截肢者由于穿戴髋关节假肢时行走困难,选择放弃使用假肢而改用轮椅等移动辅具。现有的髋关节假肢远不能满足截肢者的使用需求。
2、因此,本领域的技术人员致力于提供一种主被动混合驱动的髋膝一体化智能假肢,使得患者在各种场合都能得到需要的阻尼或者去动力矩,通过主被动混合驱动的方式减轻电机的电量消耗;通过使用一体化的结构设计降低控制成本,增强假肢的仿生性。
技术实现思路
1、有鉴于现有技术上的缺陷,本发明所要解决的技术问题是如何提供一种主被动混合驱动的髋膝一体化智能假肢。
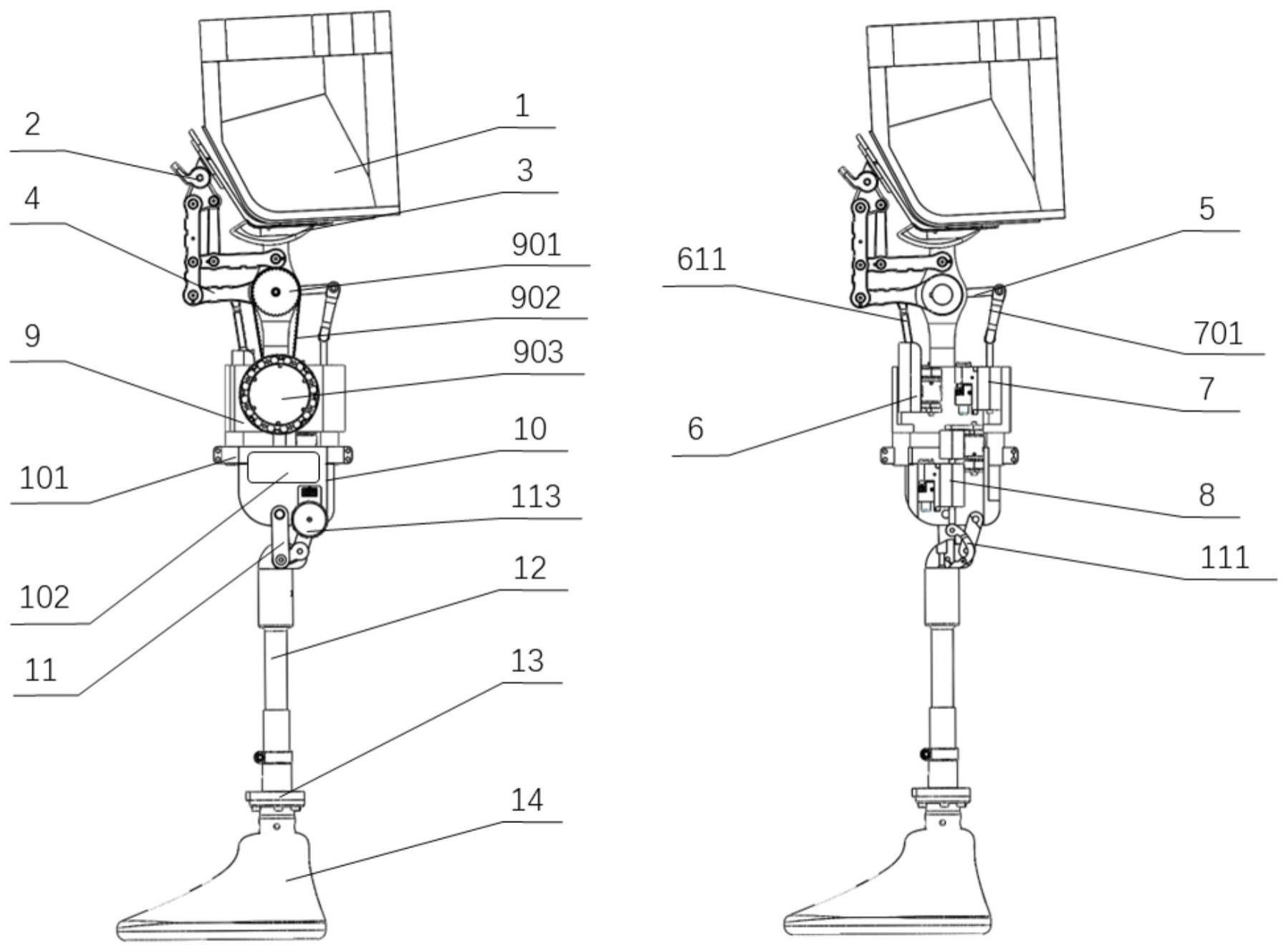
2、为实现上述目的,本发明提供的主被动混合驱动的髋膝一体化智能假肢,包括假肢收纳腔、锁扣、支撑板、活动杆、髋关节连杆、变刚度机构、液压装置、液压阻尼调节装置、髋关节支架、膝关节支架、四连杆机构、腿管、固定件、假脚,所述假肢收纳腔与所述支撑板固定连接,所述锁扣与所述支撑板连接,所述活动杆与所述锁扣连接,所述髋关节支架与所述活动杆连接,所述膝关节支架与所述髋关节支架连接,所述四连杆机构与所述膝关节支架连接,所述腿管与所述四连杆机构连接,所述固定件与所述腿管连接,所述假脚与所述固定件连接,所述髋关节连杆与所述髋关节支架连接,所述变刚度机构的输出端、所述液压装置的输出端分别与所述髋关节连杆的两端连接,所述液压阻尼装置的输出端与所述四连杆机构连接。
3、进一步地,所述髋关节支架包括髋关节驱动齿轮、第三同步带、髋关节驱动电机,所述髋关节驱动电机的输出端通过所述第三同步带驱动所述髋关节驱动齿轮。
4、优选地,所述髋关节驱动齿轮与所述髋关节连杆通过键槽连接。
5、进一步地,所述变刚度机构包括刚度连杆、第一变刚度弹簧、第一滚珠丝杠、第一刚度调节电机、第一同步带,所述第一刚度调节电机的输出端通过所述第一同步带连接所述第一滚珠丝杠,所述第一变刚度弹簧套设在所述第一滚珠丝杠上,所述刚度连杆的一端与所述第一滚珠丝杠连接,所述刚度连杆的另一端与所述髋关节连杆的一端连接。
6、进一步地,所述液压装置包括连杆、第一活塞杆、第一活塞、第一液压调节装置、第一旋转电机,所述第一旋转电机的输出端与所述第一液压调节装置连接,所述第一活塞套设在所述第一活塞杆上,所述第一活塞设在所述第一液压调节装置的第一液压缸内,所述连杆的一端与所述第一活塞杆连接,所述连杆的另一端与所述髋关节连杆的另一端连接。
7、进一步地,所述四连杆机构包括膝关节连杆、膝关节驱动电机,所述膝关节驱动电机的输出端与所述膝关节连杆连接,所述膝关节支架、所述腿管分别与所述膝关节连杆连接。
8、进一步地,所述液压阻尼调节装置包括第二活塞杆、第二活塞、第二滚珠丝杠、第二刚度调节电机、第二同步带、第二变刚度弹簧、第二旋转电机、第二液压调节装置,所述第二刚度调节电机的输出端通过所述第二同步带连接所述第二滚珠丝杠,所述第二变刚度弹簧套设在所述第二滚珠丝杠上,所述第二旋转电机的输出端连接所述第二液压调节装置,所述第二活塞套设在所述第二活塞杆上,所述第二活塞设在所述第二液压调节装置的第二液压缸内,所述第二活塞杆与所述第二滚珠丝杠连接,所述第二活塞杆还与所述膝关节连杆连接。
9、进一步地,所述变刚度机构、液压装置、液压阻尼调节装置固设在所述膝关节支架上。
10、优选地,还包括控制模块,所述控制模块与所述髋关节驱动电机膝关节驱动电机电连接。
11、优选地,所述支撑板为l型。
12、本发明至少具有如下有益技术效果:
13、1、本发明将主动驱动与被动驱动相结合,能够在上楼梯和上坡时提供主动力矩,辅助患者上楼梯和上坡;在平地行走即无需主动力矩情况下关闭驱动电机,只通过液压阻尼器提供良好的阻尼性能,实现帮助患者交替上楼梯和上坡的同时降低了驱动电机的电量消耗,增加了假肢的续航能力。
14、2、本发明将髋关节驱动和膝关节驱动整合控制,提高了控制效率,也更符合仿生特性;重量放在大腿重心,降低了重心保证安全性;在假肢站立期,通过降低假肢髋关节整体刚度,使得主要受力转移到支撑板底部内,提高了安全性。
15、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
技术特征:
1.一种主被动混合驱动的髋膝一体化智能假肢,其特征在于,包括假肢收纳腔、锁扣、支撑板、活动杆、髋关节连杆、变刚度机构、液压装置、液压阻尼调节装置、髋关节支架、膝关节支架、四连杆机构、腿管、固定件、假脚,所述假肢收纳腔与所述支撑板固定连接,所述锁扣与所述支撑板连接,所述活动杆与所述锁扣连接,所述髋关节支架与所述活动杆连接,所述膝关节支架与所述髋关节支架连接,所述四连杆机构与所述膝关节支架连接,所述腿管与所述四连杆机构连接,所述固定件与所述腿管连接,所述假脚与所述固定件连接,所述髋关节连杆与所述髋关节支架连接,所述变刚度机构的输出端、所述液压装置的输出端分别与所述髋关节连杆的两端连接,所述液压阻尼装置的输出端与所述四连杆机构连接。
2.如权利要求1所述的主被动混合驱动的髋膝一体化智能假肢,其特征在于,所述髋关节支架包括髋关节驱动齿轮、第三同步带、髋关节驱动电机,所述髋关节驱动电机的输出端通过所述第三同步带驱动所述髋关节驱动齿轮。
3.如权利要求2所述的主被动混合驱动的髋膝一体化智能假肢,其特征在于,所述髋关节驱动齿轮与所述髋关节连杆通过键槽连接。
4.如权利要求3所述的主被动混合驱动的髋膝一体化智能假肢,其特征在于,所述变刚度机构包括刚度连杆、第一变刚度弹簧、第一滚珠丝杠、第一刚度调节电机、第一同步带,所述第一刚度调节电机的输出端通过所述第一同步带连接所述第一滚珠丝杠,所述第一变刚度弹簧套设在所述第一滚珠丝杠上,所述刚度连杆的一端与所述第一滚珠丝杠连接,所述刚度连杆的另一端与所述髋关节连杆的一端连接。
5.如权利要求4所述的主被动混合驱动的髋膝一体化智能假肢,其特征在于,所述液压装置包括连杆、第一活塞杆、第一活塞、第一液压调节装置、第一旋转电机,所述第一旋转电机的输出端与所述第一液压调节装置连接,所述第一活塞套设在所述第一活塞杆上,所述第一活塞设在所述第一液压调节装置的第一液压缸内,所述连杆的一端与所述第一活塞杆连接,所述连杆的另一端与所述髋关节连杆的另一端连接。
6.如权利要求5所述的主被动混合驱动的髋膝一体化智能假肢,其特征在于,所述四连杆机构包括膝关节连杆、膝关节驱动电机,所述膝关节驱动电机的输出端与所述膝关节连杆连接,所述膝关节支架、所述腿管分别与所述膝关节连杆连接。
7.如权利要求6所述的主被动混合驱动的髋膝一体化智能假肢,其特征在于,所述液压阻尼调节装置包括第二活塞杆、第二活塞、第二滚珠丝杠、第二刚度调节电机、第二同步带、第二变刚度弹簧、第二旋转电机、第二液压调节装置,所述第二刚度调节电机的输出端通过所述第二同步带连接所述第二滚珠丝杠,所述第二变刚度弹簧套设在所述第二滚珠丝杠上,所述第二旋转电机的输出端连接所述第二液压调节装置,所述第二活塞套设在所述第二活塞杆上,所述第二活塞设在所述第二液压调节装置的第二液压缸内,所述第二活塞杆与所述第二滚珠丝杠连接,所述第二活塞杆还与所述膝关节连杆连接。
8.如权利要求7所述的主被动混合驱动的髋膝一体化智能假肢,其特征在于,所述变刚度机构、液压装置、液压阻尼调节装置固设在所述膝关节支架上。
9.如权利要求7所述的主被动混合驱动的髋膝一体化智能假肢,其特征在于,还包括控制模块,所述控制模块与所述髋关节驱动电机膝关节驱动电机电连接。
10.如权利要求1所述的主被动混合驱动的髋膝一体化智能假肢,其特征在于,所述支撑板为l型。
技术总结
本发明公开了一种主被动混合驱动的髋膝一体化智能假肢,包括假肢收纳腔、锁扣、支撑板、活动杆、髋关节连杆、变刚度机构、液压装置、液压阻尼调节装置、髋关节支架、膝关节支架、四连杆机构、腿管、固定件、假脚,所述假肢收纳腔与所述支撑板固定连接,所述锁扣与所述支撑板连接,所述活动杆与所述锁扣连接,所述髋关节支架与所述活动杆连接,所述膝关节支架与所述髋关节支架连接,所述四连杆机构与所述膝关节支架连接,所述腿管与所述四连杆机构连接,所述固定件与所述腿管连接,所述假脚与所述固定件连接。本发明在实现帮助患者交替上楼梯和上坡的同时降低了驱动电机的电量消耗,增加了假肢的续航能力。
技术研发人员:喻洪流,张哲文,陈长龙,汪晓铭,黎林荣,罗胜利
受保护的技术使用者:上海理工大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!