智能消毒机器人的制作方法
1.本实用新型涉及智能机器人技术领域,具体涉及到一种智能消毒机器人。
背景技术:
2.随着交通的日渐便利目,各地产生各种地铁高铁类车厢,对车厢及时进行全面的消杀是必要的,对车厢的消杀工作需要在特定时间内完成,而目前的消杀工作主要由人工来实现,由人工采用喷洒消毒液的方式,对复杂的车厢内的各个角落进行消杀,消毒方式单一。人工喷洒消毒液效率普遍不高,但用于完成消杀工作的时间短,员工工作压力大。
技术实现要素:
3.针对现有技术所存在的不足,本实用新型目的在于提出一种智能消毒机器人,采用紫外消毒与雾化消毒液相结合的方式,对车厢复杂的环境进行消杀工作,同时为机器人搭载识别环境的智能摄像头,利用物联网技术实现对环境数据的分析和分析报告的传输,最终实现使用机器人自动化且高效的完成车厢的消杀工作,具体方案如下:
4.智能消毒机器人,包括供电驱动模块、万向轮和圆台形状的机器人外壳体,所述机器人外壳体底部固定连接万向轮,所述供电驱动模块驱动连接万向轮,
5.进一步的,所述机器人外壳体内容置有雾化器、消毒液储液箱,所述雾化器连通消毒液储液箱将消毒液储液箱中的消毒液雾化处理;所述机器人外壳体外表面铺设智能紫外线灯带。
6.进一步的,所述机器人外壳体包含电子装置容置空间和液体存储装置容置空间;所述电子装置容置空间和液体存储装置容置空间在机器人外壳体内部被隔板隔开,所述隔板将机器人外壳体内部空间分隔成上下两部分。
7.进一步的,所述紫外线灯带从机器人外壳体的圆台顶面的边缘,竖直延伸至圆台底面的边缘,机器人外壳体四周均匀分布有四条智能紫外线灯带。
8.进一步的,所述隔板可拆卸固定在机器人外壳体内,所述隔板为稳固的网状结构。
9.进一步的,所述电子装置容置空间为机器人外壳体内部的上半部分;所述雾化器设置在电子装置容置空间,所述雾化器与消毒液储液箱的连通通路穿过隔板的网格;所述电子装置容置空间外部的机器人外壳体上装设有智能识别摄像头。
10.进一步的,所述供电驱动模块和消毒液储液箱可拆卸固定安装在液体存储装置容置空间,所述消毒液储液箱开设有注水孔;
11.所述注水孔对准的机器人外壳体上开设有一块可拆卸卡紧盖板。
12.进一步的,所述机器人外壳体的外表面铺设有安全触边条,所述安全触边条环绕机器人外壳体底部边沿。
13.进一步的,所述电子装置容置空间内部设置有摄像头连接组件,所述摄像头连接组件控制连接智能识别摄像头;
14.所述电子装置容置空间内部设置有信息处理器,所述信息处理器连接智能识别摄
像头;所述信息处理器分别连接显示屏、按键、天线;所述显示屏、按键、天线安设在机器人外壳体顶部圆面上。
15.与现有技术相比,本实用新型的有益效果如下:
16.(1)本实用新型设计了一种智能消毒机器人,机器人外壳体固定安装万向轮,利用机器人携带的供电驱动模块驱动万向轮,使得机器人能够自由的、自主的在任意方向上运动,为机器人能够适应车厢内复杂环境并完成消杀工作提供了客观条件;在机器人外壳体的内部设有雾化器和消毒液储液箱,雾化器将消毒液储液箱中的消毒液雾化,用以对环境进行消杀;机器人外壳体外表面铺设有智能紫外线灯带,智能紫外线灯带能够发出紫外线对环境进行消杀。本实用新型利用物理与化学方式结合的方式对环境进行消杀,消杀效果好,且机器人能够自主运动,消杀工作效率高,缓解消毒工作给工人带来的压力。
17.(2)利用一块隔板将电子装置与液体存储装置分开设置,实现了将电子装置与液体存储装置设置在同一机器人外壳内;液体存储装置容置空间的消毒液储液箱用于存储消毒液;
18.(3)在圆台状的机器人外壳体的侧面上均匀分布四条智能紫外线灯带,使得机器人能够同时对四周的环境辐射紫外光,提高了消杀效率。
19.(4)隔板可拆卸固定在机器人外壳体内,在机器人外壳体内部增加了支撑结构使得整个消毒机器人更具稳定性;同时将电子设备与储液箱分隔,避免在小空间内进行复杂连接产生的安全隐患;隔板的网状结构便于电子设备散热同时便于设备之间进行线路连接。
20.(5)雾化器位于机器人外壳体内部的上半部分,使得雾化后的气水混合物能直接排空,保证水汽不经过电路避免电子设备因水汽产生故障;电子装置容置空间外部的机器人外壳体上装设有观测识别外部环境情况的智能识别摄像头,智能识别摄像头用于观测车厢内的环境,为机器人能够适应复杂的环境提供客观信息。
21.(6)消毒液储液箱开设有注水孔,消毒液储液箱可拆卸安装在液体存储空间内,便于取出消毒液储液箱进行更换和清洗,机器人外壳体上对应开设有一个盖板,取下盖板可以直接从注水口对储液箱中加消毒水,加水过程无需取出消毒液储液箱,简化注水过程的操作。
22.(7)机器人外壳体底部四周环绕的安全触边条,缓冲机器人在工作过程中与环境产生碰撞带来的冲击,保护了机器人,使得机器人外壳体与车厢复杂的内部环境里的棱角产生具有损坏性质磕碰,延长机器人外壳体的使用寿命,并保护了内部的设备及连接结构。
23.(8)电子装置容置空间内装设摄像头连接组件、信息处理器,摄像头连接组件控制连接智能识别摄像头进行观测工作,信息处理器对智能识别摄像头观测到的画面进行分析处理,并能将工作状态通过显示屏展示、通过天线向外传输,按键可以调动信息收集传输组件的不同工作程序;
24.显示屏、按键便于人工设置工作模式、观察程序状态等操作,天线用于放大信号,避免设备线路内电流产生的磁场影响信息传输效果。
附图说明
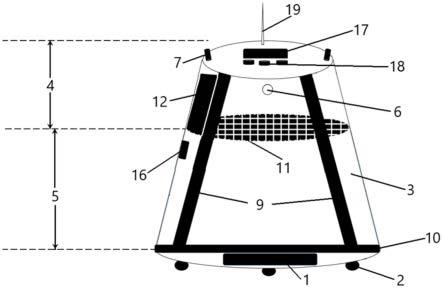
25.图1为智能消毒机器人的外观结构示意图;
26.图2为剖开部分机器人外壳后的电子装置容置空间的内部布置示意图;
27.图3为剖开部分机器人外壳后的液体存储装置容置空间的内部布置示意图;附图标记:1、供电驱动模块;2、万向轮;3、机器人外壳体;4、电子装置容置空间;5、液体存储装置容置空间;6、智能识别摄像头;7、雾化气出口;8、消毒液储液箱;9、智能紫外线灯带;10、安全触边条;11、隔板;12、雾化器;13、摄像头连接组件;14、信息处理器;15、注水孔;16、盖板;17、显示屏;18、按键;19、天线。
具体实施方式
28.下面结合实施例及附图对本实用新型作进一步的详细说明,但本实用新型的实施方式不仅限于此。
29.疫情期间,地铁车厢、高铁车厢等狭小的、使用频率较高的环境需要定期消杀,且消杀工作需要在特定时间内完成,然而,人工对这类狭小空间的消杀工作效率普遍不高。
30.本实用新型为减轻工人的工作强度,提高工作效率,设计了智能消毒机器人。
31.本实用新型的智能消毒机器人,能够通过喷洒含氯消毒剂与照射紫外线进行化学物理方法组合消毒,有效灭杀空间内空气中悬浮的病毒和设备上残留的病毒,并且对环境智能检测,且能定期发送报告给使用单位。
32.其中,观测、记录、分析环境的摄像技术及程序,雾化装置,应用物联网技术的信息传输设备均为现有技术,本实用新型不做具体介绍。电路连接也不进行详细说明。
33.如图1所示,智能消毒机器人的底部安装有万向轮2,万向轮2固定安装在呈圆台状的机器人外壳体3上,机器人外壳体3内部可拆卸固定安装有网状隔板11,隔板11将机器人外壳体3形成的内部空间划分为上下两部分,上部分为电子装置容置空间4,下部分为液体存储装置容置空间5。
34.如图3液体存储装置容置空间5的内部安置有供电驱动模块1、消毒液储液箱8;
35.供电驱动模块1为现有技术,可采用现有技术中通电后便可产生驱动力的电机装置,驱动连接万向轮2,使得本实用新型能够自主进行运动;
36.消毒液储液箱8可拆卸固定安装在液体存储装置容置空间5内,便于取出消毒液储液箱8进行清洗和更换;消毒液储液箱8上还设有注水口15,其中消毒液储液箱8固定在液体存储装置容置空间5内时,注水口15对准的机器人外壳体3上设置有一块可拆卸盖板16。机器人外壳体3上对应开设有一个盖板16,取下盖板16可以直接从注水口15往消毒液储液箱8中加消毒水,加液过程无需取出消毒液储液箱8。
37.如图2电子装置容置空间4的内部安置有雾化器12、摄像头连接组件13、信息处理器14;
38.摄像头连接组件13连接智能识别摄像头6,摄像头连接组件13用以实现智能识别摄像头6的相关电路连接,智能识别摄像头6还连接信息处理器14,信息处理器14能读取智能识别摄像头6所观测到的画面数据,并对数据进一步的分析处理,如上述内容可知,智能识别摄像头6、摄像头连接组件13、信息处理器14之间的运行逻辑为现有技术,本实用新型仅对其进行使用,未对其进行改进,并且本实用新型主要用来保护机械装置,所以本实用新型不再详细解释控制方式和电路连接;其中,智能识别摄像头6为两个,对称设置在机器人外壳体3的两侧,对机器人周围360
°
的环境进行观测,配合供电驱动模块1对万向轮进行驱
动,使得机器人在环境中能够主动变向,而且能够围绕不能穿越的障碍物进行运动。
39.信息处理器14连接显示屏17、按键18、天线19,显示屏17、按键18、天线19安设在机器人外壳体顶部的圆面上,便于人工设置工作模式、观察程序状态,操作人员可以通过按键18对机器人的工作时间、工作程序进行选择设置,显示屏17用于显示机器人的状态,天线19用于向接收端发送数据进行备案;
40.雾化器12将消毒液储液箱8内的消毒水进行雾化,并从雾化器12的雾化气出口7喷出,对环境进行消杀,其中,雾化气出口7位于电子装置容置空间4外部的机器人外壳体3的顶部圆面上,且两个雾化气出口7对称分布在远离智能识别摄像头6的地方。具体的,雾化气出口7位于机器人外壳体3的顶部圆面上,能够更好的将雾化后的水汽散入环境中进行杀毒,同时雾化气出口7设置位置远离智能识别摄像头6,避免水雾附着在智能识别摄像头6的镜头上,影响智能识别摄像头6观测到的画面。
41.进一步的,机器人外壳体3的外表面铺设有安全触边条10,安全触边条10包裹机器人外壳体3底部边沿,四周的安全触边条10缓冲了机器人在工作过程中与环境产生碰撞带来的冲击,保护了机器人。
42.智能紫外线灯带9从圆台顶面边缘竖直延伸至圆台底面边缘,机器人外壳体3四周均匀分布有四条智能紫外线灯带9,使得机器人能够同时对四周的环境辐射紫外光,提高了消杀效率。
43.进一步的,为了减轻人工负担、便捷化操作智能消毒机器人的过程,智能消毒机器人还配设工作站,工作站设置有加水模块和充电模块,在消杀工作完成后或电池电量不足或消毒液耗尽的情况下,在程序命令的引导下返回工作站,工作站相应的收容机器人进入待机状态或给机器人进行充电或对机器人的储液箱进行加水。
44.在使用智能消毒机器人进行消杀工作的过程中,可通过联网或遥控控制使得本实用新型开始工作。本实用新型支持ota在线升级和云端管理平台。
45.本实用新型的智能消毒机器人根据预设的程序进行工作,支持遥控、定时、定点、循航,可对工作时间进行设置。通过两个智能识别摄像头6检测环境状况,配合信息处理器14对环境状况进行分析实现智能避障,同时,电子设备可附加搭载人体红外感应、视觉监控等技术,再配合使用万向轮2,在遇到障碍时自动转向或调整路线前进,能够适应复杂的地面环境。安全触边条10和设计为圆台形状的机器人外壳体3使得整个装置在触碰环境时不会产生损伤。
46.智能紫外线灯带9和雾化器12同步工作,多条智能紫外线灯带9对装置周围环境紫外线杀毒,本实施例以四条智能紫外线灯带9为例;本实用新型以两个雾化气出口7为例,对装置周围环境喷洒含氯消毒剂;采用物理化学方法组合消毒,有效灭杀空间内空气中悬浮的病毒和设备上残留的病毒,同时可联网通过天线19定期发送消毒报告和环境信息给使用单位。消毒记录自动存档,可以通过监控系统了解消毒情况,记录在案,随时备查
47.配合工作台,智能消毒机器人能够实现自主充电和7x24小时连续作业,且无需人工充电、加水,能持续免维护作业。
48.本专利产品客服了现有产品的缺点,增加了消毒机器人的稳定性,灵活性和智能性,能更好的在狭小环境下展开和完成消杀工作,并且不受时间的限制,当内部结构需要更新时,可拆卸的结构能够实现快速简单的更替操作。
49.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1