髓内钉定位装置的制作方法
1.本实用新型涉及医疗器械设备技术领域,尤其是一种髓内钉定位装置。
背景技术:
2.髓内钉是医疗器械中的骨科内固定器械,相较于其他髓外固定的方式具有以下优点:1、可以控制骨折部位的轴向力线、带锁髓内钉可以防止骨折旋转畸形、降低了内置物断裂的风险;2、采用闭合及微创技术,能够有效减少手术感染率;3、可减少对骨膜血运的破坏、保留血肿内的有成骨作用的生长因子、扩髓碎屑具有自体植骨效应、肌肉收缩产生微动提供力学刺激等因素促进骨折愈合;4、通过中心固定、弹性固定、应力分散来避免应力遮挡作用,再骨折的发生率较低;5、固定牢固可以早期功能锻炼和负重;6、内固定取出通过小切口,微创。因此髓内钉一般都作为股骨干骨折的首选内固定器械。
3.在使用髓内钉时,为了防止骨折的两部分产生旋转,需要用数枚螺钉横向穿过骨干及髓内钉以进行锁定,医生会在髓内钉插入骨髓腔之前将一个钻孔导向器与髓内钉结合在一起,理论上导向器的导向孔应正对髓内钉的远端孔即锁定螺钉孔,这样钻头穿过导向孔可以正对锁定螺钉孔钻入,但由于髓内钉插入骨髓腔后经常会受长骨形状影响而使位置发生偏移或者髓内钉自身发生转动,会导致钻头在实际应用的时候并不能对准锁定螺钉孔,从而出现锁钉困难。
技术实现要素:
4.本实用新型所要解决的技术问题是:提供一种能够精准锁钉的髓内钉定位装置。
5.为解决上述技术问题本实用新型所采用的技术方案是:髓内钉定位装置,包括固定导向臂,固定导向臂的两端分别安装有髓内钉和植入工具臂,髓内钉未与固定导向臂相连接的一端设有远端孔,所述髓内钉可轴向转动的连接在固定导向臂上,所述髓内钉设有远端孔的一端为磁性端;所述植入工具臂与固定导向臂可转动连接,植入工具臂朝向髓内钉的一端设有磁定位器。
6.进一步的是:所述磁定位器由显示屏、mcu芯片和三轴磁传感器电气连接组成。
7.进一步的是:所述髓内钉与固定导向臂相连接的一端设有第一角度编码器。
8.进一步的是:还包括第一锁紧螺钉,所述第一锁紧螺钉螺纹连接在固定导向臂与髓内钉相连接的一端,第一锁紧螺钉插入固定导向臂后压紧在髓内钉伸入固定导向臂内的一端周面上。
9.进一步的是:所述固定导向臂通过可调导向臂与植入工具臂相连接,所述可调导向臂可轴向转动的连接在固定导向臂上,可调导向臂未与固定导向臂相连的一端与植入工具臂可转动连接;所述可调导向臂为长度可调的导向臂。
10.进一步的是:所述可调导向臂与固定导向臂相连接的一端设有第二角度编码器。
11.进一步的是:还包括第二锁紧螺钉和第三锁紧螺钉;所述第二锁紧螺钉螺纹连接在固定导向臂与可调导向臂相连接的一端,第二锁紧螺钉插入固定导向臂后压紧在可调导
向臂伸入固定导向臂内的一端周面上;所述可调导向臂与植入工具臂相连接的一端固定有连接块,所述植入工具臂可轴向转动的连接在连接块上且植入工具臂与连接块之间为可转动连接,所述第三锁紧螺钉螺纹连接在连接块上并抵靠在植入工具臂上。
12.进一步的是:所述髓内钉的磁性端安装有永磁体,所述永磁体可拆卸的设置在远端孔内。
13.进一步的是:所述髓内钉的磁性端安装有电磁体。
14.进一步的是:所述电磁体包括可拆卸设置在远端孔内的螺线管以及缠绕在螺线管上的导线,螺线管内设有铁磁性物质,所述导线的两端穿过髓内钉内腔后与外接电源电性连接。
15.进一步的是:所述髓内钉磁性端的磁性由靠近远端孔设置的励磁线圈对髓内钉励磁而得。
16.进一步的是:所述磁定位器内设有无线通讯模块。
17.进一步的是:所述无线通讯模块为蓝牙通讯模块。
18.本实用新型的有益效果是:本实用新型将髓内钉设有远端孔的一端设为磁性端,同时在固定导向臂上设置磁定位器来对髓内钉的远端孔进行定位,在髓内钉插入骨髓腔后通过磁定位器对髓内钉的磁性端进行监控,根据磁性端三维磁场分布的变化情况来判断远端孔的方向和位置,再根据磁定位器上的监控数据对植入工具臂的植入角度和旋转方向进行调整,从而使得植入工具臂能够准确对准髓内钉的远端孔,实现快速定位,降低了手术时间,同时也减少了麻醉时间,有效提高了手术的效率。
附图说明
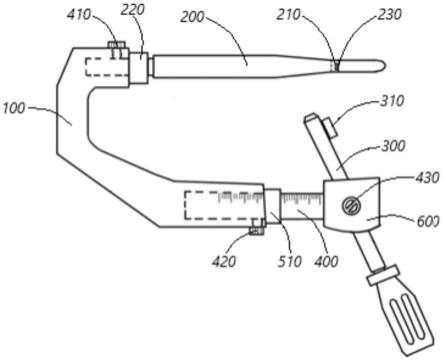
19.图1为本实用新型第一种实施例的结构示意图;
20.图2为本实用新型第二种实施例的结构示意图;
21.图3为本实用新型第三种实施例中电磁铁的示意图;
22.图4至图6为本实用新型中磁定位器的工作示意图;
23.图7为本实用新型励磁后的磁场分布情况示意图;
24.图中标记为:100-固定导向臂、200-髓内钉、210-远端孔、220-第一角度编码器、230-永磁体、241-螺线管、242-导线、250-励磁线圈、300-植入工具臂、310-磁定位器、410-第一锁紧螺钉、420-第二锁紧螺钉、430-第三锁紧螺钉、500-可调导向臂、510-第二角度编码器、600-连接块。
具体实施方式
25.为了便于理解本实用新型,下面结合附图对本实用新型进行进一步的说明。
26.如图1和图2所示,本实用新型所公开的髓内钉定位装置包括固定导向臂100,固定导向臂100上安装有髓内钉200和植入工具臂300;髓内钉200和植入工具臂300都与固定导向臂100可转动连接,髓内钉200和植入工具臂300分别安装在固定导向臂100的两端端头。髓内钉200未与固定导向臂100相连接的一端设有远端孔210,此远端孔210即为植入工具臂300应对准的锁定螺钉孔,髓内钉200能够以自身的轴线为中心线进行轴向转动。本实用新型中为了在髓内钉200插入骨髓腔后实现植入工具臂300与髓内钉200上远端孔210之间快
速、准确的定位,将髓内钉200设有远端孔210的一端设置为磁性端,同时在植入工具臂300上安装磁定位器310,磁定位器310安装在植入工具臂300朝向髓内钉200的一端上。
27.本实用新型中的磁定位器310由电气连接的显示屏、mcu芯片和磁传感器组成;其中显示屏选用小型的oled显示屏,显示屏可实时显示所监控的三维磁场强度;磁传感器为三轴磁传感器,三轴磁传感器对髓内钉200的磁性端的磁场分布情况进行监控并传递磁场信号给mcu芯片,mcu芯片再将磁场信号转化为数字、图像或文字信号显示在显示屏上。
28.由于人体长管状骨的骨髓腔不是规则的圆柱孔,当髓内钉200插入骨髓腔后,髓内钉200的插入端会随骨髓腔的形状而发生位移,这就造成了远端孔210的方向或位置会与植入工具臂300的朝向不一致,导致植入工具臂300无法准确定位远端孔210,打孔位置很容易发生偏差,螺钉不易找准方向植入远端孔210内,从而会延长手术时间,增加病人的创口面积,并且会增加引发并发症的几率。本实用新型通过髓内钉200的磁性端与磁定位器310的配合来对远端孔210的角度和方向进行准确的定位,在骨头上钻出与远端孔210准确对齐的通孔,使植入工具臂300能够快速、准确地将螺钉植入髓内钉200的远端孔210内。
29.本实用新型中髓内钉200与固定导向臂100之间为可转动连接,而髓内钉200转动的具体角度则可通过第一角度编码器220来进行监控。如图1和图2所示,在髓内钉200与固定导向臂100相连接的一端设有第一角度编码器220,通过设置第一角度编码器220可在髓内钉200插入骨髓腔后对髓内钉200是否发生轴向转动进行实时观察,并且能够详细了解到髓内钉200的具体转动角度。髓内钉200与固定导向臂100之间的具体连接方式为在髓内钉200与固定导向臂100相连接的一端端头轴向开设一个可供髓内钉200端头插入的盲孔,髓内钉200的此端端头插入盲孔中。而髓内钉200的固定则依靠第一锁紧螺钉410来实现,如图1和图2所示,第一锁紧螺钉410螺纹连接在固定导向臂100与髓内钉200相连接的一端,第一锁紧螺钉410插入固定导向臂100后压紧在髓内钉200伸入固定导向臂100内的一端周面上;通过转动第一锁紧螺钉410可对髓内钉200进行锁紧以阻止髓内钉200在定位完成后再次发生轴向转动。
30.如图1和图2所示,本实用新型中的固定导向臂100通过可调导向臂500与植入工具臂300相连接,可调导向臂500可轴向转动的连接在固定导向臂100上,可调导向臂500未与固定导向臂100相连的一端与植入工具臂300可转动连接;可调导向臂500为长度可调的导向臂。可调导向臂500与固定导向臂100相连接的一端设有第二角度编码器510,通过设置第二角度编码器510可对可调导向臂500的转动角度进行实时监控,即可对安装在可调导向臂500上的植入工具臂300的转动角度进行实时监控。可调导向臂500与固定导向臂100之间的可转动连接以及可调导向臂500的长度调节都依靠以下具体结构来实现:在固定导向臂100与可调导向臂500相连接的一端轴向开设一个可供可调导向臂500插入的盲孔,可调导向臂500的此端端头插入盲孔中,通过转动可调导向臂500即可对植入工具臂300的转动角度进行调节,而通过抽拉可调导向臂500即可对可调导向臂500的伸出长度进行调节。
31.可调导向臂500与植入工具臂300之间的可转动连接依靠设置在二者之间的连接块600来实现,如图1和图2所示,在可调导向臂500与植入工具臂300相连接的一端固定有连接块600,植入工具臂300可轴向转动的连接在连接块600上且植入工具臂300与连接块600之间为可转动连接。本实用新型中还设置了第二锁紧螺钉420和第三锁紧螺钉430分别对可调导向臂500和植入工具臂300进行锁紧,第二锁紧螺钉420和第三锁紧螺钉430的具体安装
方式与上述的第一锁紧螺钉410相似,在此就不再赘述;第二锁紧螺钉420螺纹连接在固定导向臂100与可调导向臂500相连接的一端,第二锁紧螺钉420插入固定导向臂100后压紧在可调导向臂500伸入固定导向臂100内的一端周面上;第三锁紧螺钉430螺纹连接在连接块600上并抵靠在植入工具臂300上。
32.本实用新型中髓内钉200磁性端的实现采用以下三种具体实施方式:
33.实施例1
34.如图1所示,在髓内钉200上安装永磁体230,永磁体230可拆卸的安装在髓内钉200的远端孔210内。为了便于进行永磁体230的拆装,永磁体230的形状可为内六角圆柱螺钉型,通过螺纹连接的方式将永磁体230安装在髓内钉200的远端孔210中。在进行手术时,将髓内钉200沿导向针植入骨髓腔中;以图4至图6中所示坐标系为基准,此时磁定位器310与永磁体230之间的相对位置示意图如图4所示,磁定位器310先在远端孔210附近绕髓内钉200在yoz平面上进行测量,如果远端孔210的方向与打孔方向不一致,则磁传感器310在z方向上的值较大;然后对旋转角度进行调节,此时磁定位器310与永磁体230之间的相对位置示意图如图5所示,远端孔210的方向与打孔方向一致,即在同一水平面内,但未进行定位,磁传感器310在z方向上的值最小;最后以垂直孔的方向沿x轴方向移动磁定位器310进行测量,当y轴方向上的磁场强度达到预定的阈值以后,可认定此时监控到永磁体230在磁定位器310下方,此时磁定位器310与永磁体230之间的相对位置示意图如图6所示,完成了孔方向的定位和孔位置的定位,磁定位器310上同时会出现文字提醒,然后即可进行打孔操作。
35.实施例2
36.此实施例中不采用磁体,而是使用励磁线圈250对髓内钉200的远端孔210附近进行励磁,可利用励磁激励加载例如频率、相位等信息,检测到的磁信号可根据励磁激励加载的特征信息进行信号处理,消除周围干扰磁场的影响,提高检测精度。如图2所示,在靠近髓内钉200的远端孔210处放置励磁线圈250对髓内钉200进行励磁。磁定位器310内设有无线通讯模块,由于传输距离较小,无线通讯模块可选用蓝牙通讯模块,通过无线通讯模块可实时传输所监控的三维磁场强度。在进行手术时,将髓内钉200沿导向针植入骨髓腔中,然后在骨头外放置励磁线圈250队髓内钉200进行励磁。在定位时,植入工具臂300首先在远端孔210附近在yoz平面上进行测量,根据三维磁场分布变化情况,确定远端孔210的方向是否与植入工具臂300的打孔方向一致,若不一致,则旋转角度进行调整再次测量;当远端孔210的方向与植入工具臂300的打孔方向一致后,将可调导向臂500在远端孔210附近沿x方向移动,植入工具臂300上的磁定位器310随之移动,扫描产生的信号通过无线通讯模块传输至监测设备。如图7所示,由监测设备上的波形图,通过计算峰值差的算法来定位远端孔210的位置。满足设定的条件及阈值时,监控设备自动提醒,实现定位。
37.实施例3
38.此实施例中在髓内钉200上安装电磁铁。如图3所示,电磁体包括可拆卸设置在髓内钉200的远端孔210内的螺线管241以及缠绕在螺线管241上的导线242,螺线管241内设有铁磁性物质,铁磁性物质可采用铁芯,导线242的两端穿过髓内钉200内腔后与外接电源电气连接。通过设置电磁铁可施加特定频率的电流来产生特定频率的空间磁场,从而能够避免周围磁场对定位的影响。当电流通过导线242时,会在导线242的周围产生均匀磁场;在通电后的螺线管241内插入铁芯后,铁芯被螺线管241通电后产生的磁场所磁化,两个磁场相
互叠加,使得螺线管241处的磁性大大增强,则可通过磁传感器310对髓内钉200远端孔210处磁场大小的变化进行监控来判断定位是否准确。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1