仿生手术器械的制作方法
1.本技术实施例涉及医疗器械技术领域,尤其涉及一种手柄控制器械。
背景技术:
2.微创外科手术是指通过在人体体表穿刺形成若干手术通道,对腹腔、胸腔、盆腔或关节腔内的器官病灶进行切除或修补等;或经人体自然腔道如口腔、尿道、直肠、阴道等,将内窥镜和操作器械通过上述途径进入体腔内,由术者在内窥镜的监视下,通过术者在病人体外操作器械,借助器械工作端伸入病人体腔内,并对腔内的病灶进行切除或对器官进行修补、缝合等操作,并于术毕后将内窥镜和器械取出,缝合体表的小孔或自然腔道切口即可完成整个手术。
3.有鉴于此,本技术的主要目的在于提供一种用于辅助执行微创外科手术的手术器械。
技术实现要素:
4.鉴于上述问题,本技术提供一种仿生手术器械,以克服上述问题或者至少部分地解决上述问题。
5.本技术实施例提供一种仿生手术器械,包括:本体,具有定位环和手柄,所述手柄自所述定位环朝远端延伸;延伸件,其活动连接所述本体并朝远端弯曲延伸,所述延伸件可相对于所述本体挠动;功能件,其设于所述延伸件的端部;其中,术者可将腕部定位于所述定位环中并握持于所述手柄上,以使所述本体受力相对于所述延伸件挠动,以调节所述功能件的操作位置。
6.可选地,所述延伸件包括:第一连杆,其连接所述定位环,并自所述定位环朝远端弯曲延伸,且所述第一连杆远离所述定位环的端部位于所述手柄的轴向延伸线上;第二连杆,其连接所述第一连杆和所述功能件,并沿所述手柄的轴线朝远端延伸。
7.可选地,所述器械还包括可弯曲结构,其设于所述第二连杆的端部并连接所述功能件;所述第二连杆可受力沿不同方向弯曲,以调节所述功能件的轴向方向。
8.可选地,所述器械还包括导向件,其连接所述可弯曲结构与所述定位环;所述本体可受力相对于所述延伸件挠动,以经由所述导向件驱动所述可弯曲结构沿不同方向弯曲。
9.可选地,所述可弯曲结构包括周向分布的多个穿设单元;所述定位环包括周向分布的多个连接单元;其中,各所述连接单元相对于所述定位环的设置位置与各所述穿设单元相对于所述可弯曲结构的设置位置一一对应。
10.可选地,所述导向件还包括多根导向丝,其中,每一根导向丝分别连接具有对应位置关系的一个所述穿设单元与一个所述连接单元;通过驱动所述本体相对于所述延伸件挠动,使得所述导向丝中的至少一根产生联动,以驱动所述可弯曲结构沿不同方向弯曲。
11.可选地,所述定位环包括环形定位腔,所述延伸件包括连通所述环形定位腔的延伸通道;连接各所述连接单元的各所述导向丝可沿所述环形定位腔延伸,并在所述环形定
位腔与所述延伸通道的连通处聚拢,以经由所述延伸通道连接所述可弯曲结构的各所述穿设单元。
12.可选地,所述器械还包括设于所述手柄上的操作件,其经由所述延伸件连接所述功能件,并可相对于所述手柄在作用位置与非作用位置之间往复移动,以驱动所述功能件在作用状态与非作用状态之间切换。
13.可选地,所述器械还包括连接所述操作件与所述功能件的牵引丝;所述牵引丝可自所述操作件进入所述延伸通道内,并经由所述延伸通道连接所述功能件。
14.可选地,所述功能件包括手术钳、手术剪中的一个。
15.综上所述,本技术的仿生手术器械,符合人体设计工学,可以提高术者的操作感受。
16.再者,本技术的仿生手术器械还可提供直觉式的控制形式,无需特殊培训即可上手操作,可降低手术壁垒,扩大适应症范围。
附图说明
17.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术实施例中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
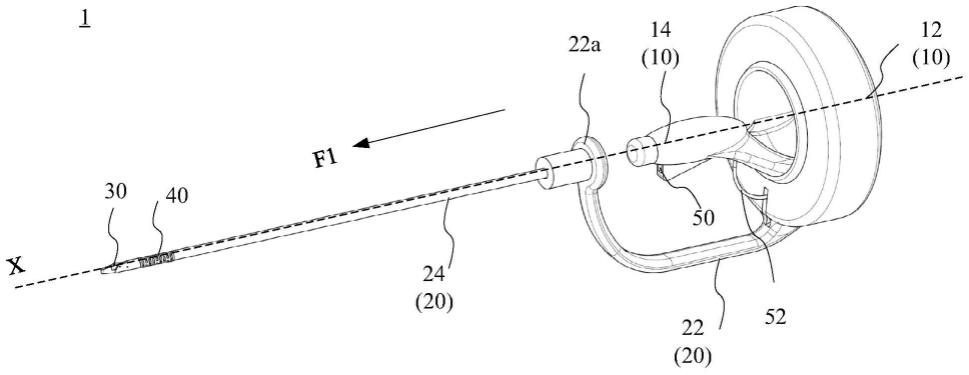
18.图1至图2为本技术仿生手术器械的整体结构示意图。
19.图3为本技术仿生手术器械的握持姿势的示意图。
20.图4为本技术仿生手术器械的局部结构侧视图。
21.图5a至图5b为本技术仿生手术器械的一实施例的局部结构示意图。
22.图6a至图6b为本技术仿生手术器械的另一实施例的局部结构示意图。
23.图7a和图7b为本技术仿生手术器械的可弯曲结构的示意图。
24.元件标号
25.1:仿生手术器械;
26.10:本体;
27.12:定位环;
28.122:连接单元;
29.124:环形定位腔;
30.14:手柄;
31.20:延伸件;
32.200:延伸通道;
33.22:第一连杆;
34.22a:端部;
35.24:第二连杆;
36.30:功能件;
37.40:可弯曲结构;
38.41:穿设单元;
39.42:导向件;
40.422:导向丝;
41.50:操作件;
42.52:牵引丝。
具体实施方式
43.为了使本领域的人员更好地理解本技术实施例中的技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术实施例一部分实施例,而不是全部的实施例。基于本技术实施例中的实施例,本领域普通技术人员所获得的所有其他实施例,都应当属于本技术实施例保护的范围。
44.微创外科手术是指通过在人体体表穿刺形成若干手术通道,对腹腔、胸腔、盆腔或关节腔内的器官病灶进行切除或修补等;或经人体自然腔道如口腔、尿道、直肠、阴道等,将内窥镜和操作器械通过上述途径进入体腔内,由术者在内窥镜的监视下,通过手在病人体外操作器械,借助器械工作端伸入病人体腔内对腔内的病灶进行切除或对器官进行修补、缝合等操作,术毕将内窥镜和器械取出,缝合体表的小孔或自然腔道切口即可完成整个手术。
45.微创外科与传统外科相比,以其手术创伤小,术中并发症少,术后疼痛减轻,住院时间短等优点,现已成为众多外科常见疾病的首选治疗方案。该术式通常以3-5个5mm-20mm左右的切口作为手术通道,医生需借助细长型的专用腹腔镜手术器械进行手术操作。
46.目前全球最常用的腹腔镜手术器械通常为细长型的直式手术器械,相对传统开放手术来说具有以下弊端:1、直式器械的操作角度严重受限,在人体内仅可作以体表切口为运动支点的杠杆式运动;2、对于需要精细分离、缝合、打结等复杂操作的手术,这种直式器械很难做到,通常需要医生经过大量的模型训练或动物实验训练才能够掌握;3、对于经胸腔、腹腔的单一切口手术或经人体自然腔道的微创手术,普通的长直器械难以适应狭小空间的操作需求,对操作医生的训练水平提出了很大的挑战,虽然这种手术方式非常受患者青睐,但是能完成该术式的手术医生数量非常稀少。究其原因,主要是缺乏具有灵活运动控制性能的,可以通过简单逻辑、凭直觉控制的多自由度手术器械。
47.随着科技的进步,以达芬奇(da vinci)手术机器人为代表的智能手术器械系统逐渐在全球各个国家推广使用开来,因其轻便的直觉式控制形式,舒适的医生远程操控方式,以及仿手腕式的器械运动形式,让缝合、打结这些复杂操作变得非常简单;但是该技术所使用的手术器械为消耗性产品,平均每台手术仅耗材费用就在3-5万人民币之间,目前平均每年在中国完成的机器人辅助微创手术数量不足10万例,这与每年千万余例胸、腹腔镜微创手术的需求量相比,远不能满足人民对这一高新科技的需求。
48.近年来,国际上出现了一种新型的手控可弯曲手术器械,在传统直式腹腔镜器械的基础上加入了可控弯曲的关节,除了可以做杠杆式撬动以外,还可通过手臂和手腕的联合运动,控制器械头端进行多自由度弯曲和旋转。例如:第cn101909526a号专利和第cn102525659a号专利中提供的器械形式。但通过多年的临床应用证实,由于该类器械的施力件运动运动中心位于手掌前侧,在操作时的人机功效学方面并不理想,器械的控制除了需要手腕运动之外还需要手前臂、甚至大臂和肩膀的大幅度运动才能操控好器械,让外科
医生感到非常困惑,截至目前两种产品均已退出市场。
49.微创手术器械,作为医生必须凭借的手术操作工具,其控制与效应机理的人机工效学设计决定了其临床可用性的高低,在专利us20170095922a1 中(flexdex surgical inc.),出现了以人体手腕中心点为可弯曲控制中心点的设计,其通过在医生手上佩戴手环,再通过手环与器械施力件接合,让整个施力件的旋转运动中心刚好位于手腕截面的中心点,这与人手抓握物体并通过旋转手腕摆动物体的直觉运动习惯是一致的,做到了比较简单的控制和效应逻辑,提高了控制功效,无需长时间的适应性培训,降低了使用操作门槛。但是,通过临床应用后医生们发现,这种器械施力件的抓握形式让医生无法单手完成器械抓持和脱离动作,在术中出现出血等紧急状况时难以让主刀医生快速释放器械施力件,从而造成可能的风险。另外由于不同目标脏器的手术或者同一脏器,不同手术入路的选择会导致手术器械插入人体内的角度多变,以至于对手臂与器械主体之间的夹角具有多变的要求,既医生的手握持器械施力件的角度和方向并非固定不变的,但上述器械的施力件握持方式单一,不能适应多种握持方式的变化,以至于在手术操作时会造成医生手腕或手臂由于不能选择灵活的抓握方式和角度而较容易产生劳损,使用感受较差;最后上述器械的另一大缺陷是用于运动控制的多根牵拉联动丝所容置的施力件连接桥体积过大,以至于经常存在器械之间或器械与手术内窥镜碰撞干涉的情况,给手术操作的效率带来了较大影响。
50.在us20180110577a1,us20200237466a1,us10363055b2专利中,提供了一种多关节的多自由度手术器械,其器械头端由两个正交布置的运动枢轴组成了可以模拟人手运动形式的器械头端,施力件上设置了对应的正交轴,用于直觉控制器械头端的运动形式,能够将类似达芬奇手术机器人(intuitive surgical operations,inc.)形式的器械(例如专利: us5792135a,us6312435b1,us6746443b1中提供的手术器械),通过机械传动施力件实现多自由度控制,上述器械较好的实现了人手运动形式的仿生控制,控制逻辑比较简单,容易让医生快速适应,无需长时间的适应性培训,降低了使用操作门槛。该器械的特点是施力件运动中心位于手腕正上方,使用时手掌包绕握住柱状施力件,食指与大拇指插入操作环内,用于控制器械头的开合和左右运动,手掌握持施力件俯仰运动时可实现对器械头端的俯仰运动控制,器械头端沿器械杆的旋转需要医生手腕握住器械施力件做1:1角度的转动方能实现。该器械的主要弊端表现在施力件握持方式严格受限,不能适应多种目标器官或手术入路选择对器械握持方式的多样性要求,导致医生的手腕和手臂容易发生劳损;其次,器械头端不能独立控制旋转,以至于在缝合或打结操作时医生需要通过不断旋转手腕或前臂来进行旋转控制,增加了手腕和手臂负担,当器械头端已经处于偏置状态时,既手腕已经处于左、右或上、下弯曲时,很难再行叠加手腕和前臂的旋转,致使需要叠加弯曲和旋转的运动无法实现,从而限制了器械在手术中的适用性;再次,上述专利所述技术方案的施力件体积较大,容易发生施力件之间或器械施力件与内窥镜施力件之间的碰撞,从而影响手术进程。
51.有鉴于此,本技术提供一种手柄控制器械,可至少部分地解决上述现有技术中存在的种种问题。
52.以下将结合各附图详细描述本技术的各实施例。
53.请参考图1至图2,本技术的仿生手术器械1包括本体10、延伸件20、功能件30。
54.本体10具有定位环12和手柄14,其中,手柄14自定位环12朝远端 (参考图1所示f1
方向)延伸。
55.延伸件20活动连接本体10并朝远端f1弯曲延伸,延伸件20可相对于本体10挠动(即360转动)。
56.于本实施例中,延伸件20活动连接于定位环12的底部,并朝远端f1 弯曲延伸,且可相对于定位环12挠动。
57.功能件30设于延伸件20的端部。
58.于本实施例中,功能件30可包括手术钳、手术剪中的一个。
59.于本实施例中,术者可将腕部定位于定位环12中并握持于手柄14上 (参考图3),以使本体10受力相对于延伸件20挠动,以调节功能件30的操作位置。
60.可选地,延伸件20可包括第一连杆22和第二连杆24。
61.第一连杆22连接定位环12,并自定位环12朝远端f1弯曲延伸,且第一连杆22远离定位环12的端部22a位于手柄14的轴向延伸线(参考图1 的x轴)上。
62.于本实施例中,第一连杆22可连接至定位环12的底端,并自定位环 12朝远端f1弯曲延伸。
63.第二连杆24连接第一连杆22和功能件30,并沿手柄14的轴线(参考图1的x轴)朝远端f1延伸。
64.可选地,器械还包括可弯曲结构40,设于第二连杆24的端部并连接功能件30。
65.于本实施例中,第二连杆24可受力沿不同方向弯曲,以调节功能件 30的轴向方向。
66.可选地,仿生手术器械1还包括导向件42,其连接可弯曲结构40与定位环12(结合参考图4)。
67.其中,本体10可受力相对于延伸件20挠动,以经由导向件42驱动可弯曲结构40沿不同方向弯曲。
68.具体地,可弯曲结构40可包括周向分布的多个穿设单元41(参考图 7a),定位环12包括周向分布的多个连接单元122(参考图5a至图5b),其中,各连接单元122相对于定位环12的设置位置与各穿设单元41相对于可弯曲结构40的设置位置一一对应。
69.于本实施例中,各连接单元122设置在定位环12的顶端、底端、左端、右端,对应的各穿设单元41设置于可弯曲结构40的顶端、底端、左端、右端。
70.可选地,导向件42还包括多根导向丝422,其中,每一根导向丝422 分别连接具有对应位置关系的一个穿设单元41与一个连接单元122。
71.于本实施例中,导向件42可包括4根导向丝422,第一根导向丝422 可连接位于定位环12的顶端的连接单元122和位于可弯曲结构40的顶端的穿设单元41;第二根导向丝422可连接位于定位环12的底端的连接单元122 和位于可弯曲结构40的底端的穿设单元41;第三根导向丝422可连接位于定位环12的左端的连接单元122和位于可弯曲结构40的左端的穿设单元41;第四根导向丝422可连接位于定位环12的右端的连接单元122和位于可弯曲结构40的右端的穿设单元41。
72.其中,可通过驱动本体10相对于延伸件20挠动,使得导向丝422中的至少一根产生联动,以驱动可弯曲结构40沿不同方向弯曲。
73.可选地,定位环12包括环形定位腔124,延伸件20包括连通环形定位腔124的延伸
通道200(参考图5a至图5b)。
74.其中,连接各连接单元122的各导向丝422可沿环形定位腔124延伸,并在环形定位腔124与延伸通道200的连通处聚拢,以经由延伸通道200连接可弯曲结构40的各穿设单元41(参考图5b和图7b)。
75.可选地,连接各连接单元122的各导向丝422也可外露于定位环12,并在延伸通道200处聚拢并进入延伸通道200中,以经由延伸通道200连接可弯曲结构40的各穿设单元41(参考图6a至图6b)。
76.可选地,仿生手术器械1还包括设于手柄14上的操作件50(参考图1、图2、图4),其经由延伸件20连接所述功能件30,并可相对于手柄14在作用位置与非作用位置之间往复移动,以驱动功能件30在作用状态与非作用状态之间切换。
77.例如,当功能件30为手术钳时,其可在操作件50的控制下在夹合状态(作用状态)与开启状态(非作用状态)之间切换。
78.可选地,仿生手术器械1还包括连接操作件50与功能件30的牵引丝 52。
79.于本实施例中,牵引丝52可自操作件50进入延伸通道200内,并经由延伸通道200连接功能件30。
80.综上所述,本技术各实施例提供的仿生手术器械,符合人体工学设计,可提高术者的操作手感,并提高器械操作控制的准确性。
81.再者,本技术的仿生手术器械可提供直觉式控制形式,无需特殊培训即可上手操作,可降低手术壁垒,并提高手术器械的控制准确性。
82.最后应说明的是:以上实施例仅用以说明本技术实施例的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1