一种患者台车的制作方法
1.本实用新型涉及医疗器械领域,尤其涉及一种患者台车。
背景技术:
2.微创医疗技术的目的是要减少诊断或手术过程中无关组织受损,从而减少病人的恢复时间、不适以及有害的副作用。例如,微创手术的影响之一是手术后住院恢复时间的减少。由于标准开放手术的平均住院时间一般比类似的微创手术平均住院时间长的多,所以增加使用微创技术每年可节约上百万美元的医院费用。尽管每年进行的许多手术可以微创方式进行,但由于受限于掌握微创手术技术所需的微创手术器械以及额外手术培训,目前仅部分手术使用了该先进技术。
3.微创机器人手术或远程手术系统已被开发,以增加外科医生的技巧并避免传统微创技术的一些限制。在远程手术中,外科医生使用伺服机构等某种形式的遥控器操纵手术器械的移动,而不是直接手持并移动器械。在远程手术系统中,医生平台可为外科医生提供手术位置的图像。观察医生平台的显示器上手术位置的二维或三维图像的同时,外科医生通过操纵医生平台的主手对病人执行手术程序,主手又控制手术器械的移动。
4.目前,微创手术机器人包括主手和持器械的机械臂,主手采集到医生的操作信号经控制系统处理后生成机械臂的控制信号,由机械臂执行手术操作。
5.中国专利cn212522007u公开了悬吊盘摆位机构及手术机器人,该专利披露的所述悬吊盘摆位机构包括至少两个悬吊盘,每个所述悬吊盘分别具有一第一转轴,所述悬吊盘围绕所述第一转轴可转动地设置,至少两个所述悬吊盘的第一转轴沿相同的方向延伸;至少两个所述悬吊盘被配置为,沿垂直于所述第一转轴的方向移动;每个所述主悬吊盘分别用于供至少一个机械臂连接。该方案需要至少两个悬吊盘,结构比较复杂,每个悬吊盘都对应一个控制系统,操作比较复杂。
6.中国专利cn212415896u公开了悬吊盘摆位机构及手术机器人,该专利披露的所述悬吊盘摆位机构包括:第一悬吊盘、第二悬吊盘和第三悬吊盘;第一悬吊盘、第二悬吊盘及第三悬吊盘分别围绕第一转轴、第二转轴及第三转轴独立地可转动地设置;第一转轴、第二转轴及第三转轴的延伸方向相同;第一悬吊盘、第二悬吊盘及第三悬吊盘分别用于供至少一个机械臂连接。该方案需要三个悬吊盘,结构比较复杂,每个悬吊盘都对应一个控制系统,操作比较复杂。
7.中国专利cn212415897u公开一种悬吊盘摆位机构及手术机器人,该专利披露的所述悬吊盘摆位机构包括至少两个主悬吊盘,两个主悬吊盘分别围绕同一主转轴与一悬吊端可转动地连接;每个所述主悬吊盘分别用于供至少一个机械臂连接。该方案需要至少两个悬吊盘,结构比较复杂,每个悬吊盘都对应一个控制系统,操作比较复杂。
8.中国专利cn111374769a,公开了一种医疗机械手用升降移动平台,该升降移动平台包括平台本体和行走轮,所述行走轮包括两个分别设于平台本体底部前侧的前行走轮、以及两个分别设于平台本体底部后侧的后行走轮,还包括升降机构和安装在升降机构上由
升降机构驱动升降的支撑座,所述支撑座的数量与行走轮的数量相匹配,且分别位于平台本体底部的前后两侧;所述升降机构的数量与支撑座的数量和位置相匹配,位于其中一个后行走轮一侧的支撑座上安装有压力传感器,所述压力传感器和升降机构均由单片机控制其工作。所述升降机构包括驱动电机、与驱动电机之间带传动的蜗轮蜗杆升降机,驱动电机设置于蜗轮蜗杆升降机的一侧,且驱动电机的丝杆电机轴与蜗轮蜗杆升降机的动力输入轴的轴线相平行,所述支撑座通过轴承安装于蜗轮蜗杆升降机的升降丝杆上。本专利公开的技术方案虽然底座能移动,且通过升降机构实现平稳停车,但是存在升降机构机构比较复杂;且存在当失电时,升降机构无法实现上升,则医护人员无法推车行走的问题。
技术实现要素:
9.有鉴于此,本实用新型提供一种患者台车,能够解决上述问题。
10.为此目的,本实用新型提供一种患者台车,至少包括多模式车底座、可升降的立柱、伸缩臂、悬吊盘和机械臂;
11.所述伸缩臂具有旋转端和移动端;所述立柱的下端竖直安装在所述多模式车底座上;所述立柱的上端与所述伸缩臂的旋转端可旋转地连接;所述悬吊盘与所述伸缩臂的移动端可转动地连接;多个所述机械臂与所述悬吊盘的同侧分别可旋转地连接。
12.进一步地,所述立柱包括下立柱座、上立柱座,及丝杆;所述上立柱座的下端插设在所述下立柱座内;所述丝杆收容在所述下立柱座与所述上立柱座围合的空间内;所述丝杆的下端与所述下立柱座固定连接,且其上端通过螺母与所述上立柱座固定连接;所述丝杆连接丝杆电机,所述丝杆电机驱动所述丝杆运动时,所述螺母带动所述上立柱座作同向运动。
13.进一步地,所述丝杆的两侧设置有对所述丝杆提供导向作用的导向机构。
14.进一步地,所述多模式车底座至少包括底盘框架、模式切换组件,及可升降的支撑组件;
15.所述底盘框架的底面的两个前角分别安装有前行走装置,其两个后角分别安装有后行走装置;每个所述前行走装置和后行走装置的旁边分别布置有所述支撑组件;所述支撑组件安装在所述底盘框架的底面;
16.所述多模式车底座具有手动模式和电动模式,且手动操作所述模式切换组件能够完成所述手动模式与所述电动模式相互切换;当处于电动模式时,车底座的移动和支撑组件的升降能够分别由相应的电机带动;当处于手动模式时,车底座的移动或驻停,及支撑组件的上升可手动完成。
17.进一步地,所述前行走装置为万向轮;所述后行走装置包括驱动轮和用于驱动所述驱动轮的动力装置。
18.进一步地,所述动力装置包括具有第一抱闸的第一动力电机、第一动力减速机和第一动力离合器;所述第一动力电机与所述第一动力减速机相连,且所述第一动力离合器安装在所述第一动力减速机的前端,所述第一动力离合器的输出端安装有所述驱动轮;或者,所述第一动力电机与所述第一动力减速机通过所述第一动力离合器相连,所述第一动力减速机的输出端安装有所述驱动轮;当手动模式时,可以实现所述第一动力离合器断开或耦合。
19.进一步地,所述动力装置包括第二动力电机和第二动力减速机;所述第二动力电机与所述第二动力减速机相连,所述第二动力电机的输出轴或所述第二动力减速机的输出轴上安装有具有抱闸和离合作用的手动解锁装置;所述第二动力减速机与所述驱动轮相连。
20.进一步地,所述动力装置包括第三动力电机、第三减速器和第三动力离合器;所述第三动力电机与所述第三减速机相连,且两者之间安装有自锁装置;所述第三动力离合器安装在所述第三减速机的前端;或者,所述第三动力电机与所述第三减速机通过所述第三动力离合器相连。
21.进一步地,所述支撑组件包括螺杆,固定安装在所述螺杆底部的脚撑、电支撑动力组件和与所述电支撑动力组件相连接的手动支撑动力组件;所述电支撑动力组件包括第一动力电机齿轮和第一齿轮,所述第一齿轮套设在所述螺杆上,且所述第一齿轮与所述第一动力电机齿轮相啮合,且能够驱动所述脚撑进行上下运动;所述手动支撑动力组件配置为驱动所述脚撑向上运动。
22.进一步地,所述手动支撑动力组件包括电支撑电机、升降轴、手动齿轮组和与所述手动齿轮组相配合的传动件;所述手动齿轮组安装在所述升降轴上,所述的电支撑电机和传动件能够驱动所述手动齿轮组运动,所述手动齿轮组能够驱动所述脚撑进行上升运动;所述手动齿轮组中安装有支撑离合结构,且所述支撑离合结构能够与所述升降轴同步运动。
23.进一步地,所述传动件为齿连续的第一齿条;所述手动齿轮组包括第二齿轮和第三齿轮;所述第二齿轮与所述第一齿轮相啮合;所述第二齿轮安装在所述升降轴的一端,所述升降轴的另一端安装有所述第三齿轮,所述第三齿轮固定连接有抱闸,且所述抱闸配置为与所述升降轴同步转动;所述第三齿轮与所述第一齿条相啮合;所述第二齿轮或第三齿轮上安装有所述离合结构,且所述第二齿轮或第三齿轮能做单向运动。
24.进一步地,所述第二齿轮与所述第一齿轮通过惰轮组相啮合;所述惰轮组包括至少一个惰轮。
25.进一步地,所述第二齿轮、第三齿轮和/或惰轮可安装在第一单向轴承结构上。
26.进一步地,手动齿轮组为可单向传动的齿轮组单元;所述传动件为第二齿条,且所述第二齿条的工作面包括几个齿部和几个缺口部;几个所述的齿部和缺口部排成一列,且相邻的两个所述齿部通过所述缺口部连接在一起;所述模式切换组件处于休眠模式时,所述缺口部与所述齿轮组单元配合;所述模式切换组件处于工作模式时,所述齿部与所述齿轮组单元相啮合。
27.进一步地,所述齿轮组单元包括齿轮一、齿轮二和齿轮三;齿轮一与所述齿轮二相啮合;所述齿轮二安装在所述升降轴的一端,所述升降轴的另一端通过第二单向轴承与所述齿轮三安装在一起;所述齿轮三通过传动轴与所述电支撑电机固定连接;所述齿轮一与所述螺杆的上端可移动地连接。
28.所述传动件为第二齿条时,优选地,所述螺杆上套设有弹性件,且所述弹性件位于所述齿轮三的下方。
29.进一步地,所述模式切换组件包括第一连杆机构和操纵机构;所述第一连杆机构的两侧分别固定连接有所述传动件;所述操纵机构能够驱动所述第一连杆机构在所述底盘
框架的底面进行移动。
30.进一步地,所述第一连杆机构包括连杆和工字型架;所述工字型架包括后横杆、前横杆,及连接所述后横杆和前横杆的中间连杆;所述后横杆的两端分别可转动地连接有所述连杆;所述前横杆的两端分别与对应的所述传动件固定连接;所述工字型架与所述底盘框架的底面滑动连接,且滑动方向与所述传动件的长度方向相平行;所述操纵机构与所述工字型架可转动地连接。
31.进一步地,所述操纵机构包括操纵杆,所述模式切换组件还包括第二连杆机构;所述操纵杆通过第二连杆机构与所述工字型架可转动地连接。
32.进一步地,所述操纵机构还包括第一轴和第二轴;所述的第一轴和第二轴上分别套设有锥形齿轮,且两个所述锥形齿轮相啮合;所述操纵杆与所述第一轴固定连接;所述第二轴的下端与所述第二连杆机构连接。
33.进一步地,所述第二连杆机构包括第一支杆和第二支杆;所述第一支杆的首端与所述第二轴固定连接,其末端与所述第二支杆的首端可转动地连接,所述第二支杆的末端与所述工字型架可转动地连接。
34.进一步地,所述操纵机构还包括感应开关和安装架;所述的第一轴和第二轴安装在所述安装架上;且所述安装架的上端的两端分别安装有一个所述感应开关;所述操纵杆在两个感应开关之间移动。
35.本实用新型的有益效果如下:
36.(1)结构简单;
37.(2)操作方便;
38.(3)由于多模式车底座具有电动模式和手动模式,即使失电情况下,升降机构能够上升,医护人员可以推车行走的问题。
附图说明
39.为了更清楚地说明本实用新型实施例,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本实用新型的一个或几个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
40.图1显示为本实用新型的患者台车的示意图;
41.图2显示为本实用新型的患者台车的另一方向示意图;
42.图3显示为本实用新型的多模式车底座的立体图之一;
43.图4显示为本实用新型的多模式车底座的立体图之二;
44.图5显示为本实用新型的多模式车底座的侧视图之一;
45.图6显示为本实用新型的多模式车底座的侧视图之二;
46.图7显示为本实用新型的后行走装置第一种实施方式的立体图之一;
47.图8显示为本实用新型的后行走装置第一种实施方式的立体图之二;
48.图9显示为本实用新型的后行走装置第一种实施方式的剖视图;
49.图10显示为本实用新型的第一动力离合器的示意图;
50.图11显示为沿图10中a-a的剖视图,其中第一动力离合器处于耦合状态;
51.图12显示为沿图10中a-a的剖视图,其中第一动力离合器处于断开状态;
52.图13显示为本实用新型的支撑组件的第一种实施方式的立体图;
53.图14显示为本实用新型的支撑组件的第一种实施方式的俯视图;
54.图15显示为沿图14中c-c的剖视图;
55.图16显示为沿图14中e-e的剖视图;
56.图17显示为本实用新型的支撑组件的第一种实施方式的主视图;
57.图18显示为沿图17中a-a的剖视图;
58.图19显示为沿图18中b-b的剖视图;
59.图20显示为本实用新型的模式切换组件于处于电动模式时的俯视图,其中支撑组件显示第一种实施方式;
60.图21显示为本实用新型的模式切换组件于处于电动模式时的仰视图,其中支撑组件显示第一种实施方式;
61.图22显示为本实用新型的模式切换组件于处于手动模式时的俯视图,其中支撑组件显示第一种实施方式;
62.图23显示为本实用新型的模式切换组件于处于手动模式时的仰视图,其中支撑组件显示第一种实施方式;
63.图24显示为本实用新型的多模式车底座于处于电动模式时的仰视图,其中未安装底盘框架,及支撑组件显示第一种实施方式;
64.图25显示为本实用新型的多模式车底座于处于手动模式时的仰视图,其中未安装底盘框架,及支撑组件显示第一种实施方式;
65.图26显示为本实用新型的操纵机构的立体图之一;
66.图27显示为本实用新型的操纵机构的立体图之二;
67.图28显示为本实用新型的操纵机构的主视图;
68.图29显示为本实用新型的操纵机构的剖视图;
69.图30显示为本实用新型的支撑组件的第二种实施方式的立体图;
70.图31显示为本实用新型的支撑组件的第二种实施方式的俯视图;
71.图32显示为本实用新型的支撑组件的第二种实施方式的主视图;
72.图33显示为沿图32中a-a的剖视图;
73.图34显示为沿图33中b-b的剖视图;
74.图35显示为本实用新型的模式切换组件于处于电动模式时的俯视图,其中支撑组件显示第二种实施方式;
75.图36显示为本实用新型的模式切换组件于处于电动模式时的仰视图,其中支撑组件显示第二种实施方式;
76.图37显示为本实用新型的模式切换组件于处于手动模式时的俯视图,其中支撑组件显示第二种实施方式;
77.图38显示为本实用新型的模式切换组件于处于手动模式时的仰视图,其中支撑组件显示第二种实施方式。
78.附图标记:
79.1多模式车底座2立柱3伸缩臂
80.25导向机构21下立柱座4悬吊盘
81.251导向轨道22上立柱座5机械臂
82.252导向滑块23丝杆51移动关节
83.53动力盒24丝杆电机52旋转关节
84.142、142”支撑结构1421、1421”螺杆1511、1511”连杆
85.11底盘框架1422、1422”脚撑1514、1514”后横杆
86.12前行走装置143电支撑齿轮1515、1515”中间连杆
87.13后行走装置1431、1431”升降轴152、152”第二连杆机构
88.131驱动轮1432第一齿轮1522、1522”第一支杆
89.1311驱动轮安装架1433第二齿轮1521、1521”第二支杆
90.132动力装置1434第三齿轮153第一齿条
91.133第一动力电机1435惰轮1423脚撑支架
92.134减速机14350惰轮轴16操纵机构
93.135动力离合器1357弹性单元161操纵杆
94.1351第一离合齿轮1437单向轴承162第一轴
95.1352第二离合齿轮144抱闸163第二轴
96.1353第三离合齿轮1441转子164锥形齿轮
97.1354拨杆15模式切换组件165感应开关
98.1355离合齿轮箱151、151”第一连杆机构166安装架
99.136后安装板1512、1512”工字型架1513、1513”前横杆
100.14支撑组件1356驱动轮轴1436”弹性件
101.141、141”电支撑电机153”第二齿条1541”齿部
102.1551滑块1432”齿轮一1542”缺口部
103.1552导轨1433”齿轮二1434”齿轮三
104.1435”单向轴承155、155”导向机构
具体实施方式
105.以下将结合实施例和附图对本实用新型的构思、具体结构及产生的技术效果进行清楚、完整的描述,以充分地理解本实用新型的目的、方案和效果。需要说明的是,在不冲突的情况下,本技术实施例中的特征可以相互组合。
106.还需要说明的是,在本实用新型的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
107.下面将结合附图,对本发明创造做进一步说明。
108.根据手术要求可以将本实用新型的一种患者台车移动到指定地方或驻停在指定地方。
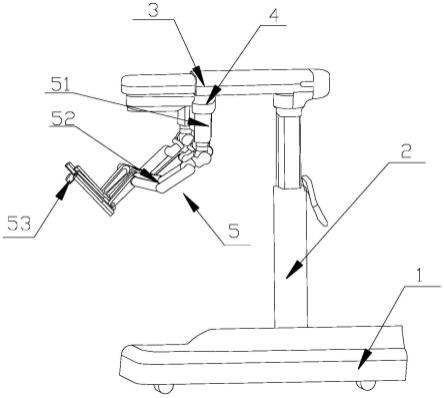
109.如图1所示,患者台车至少包括多模式车底座1、可升降的立柱2、伸缩臂3、悬吊盘4
和机械臂5。
110.所述伸缩臂3具有旋转端和与所述旋转端相对的移动端。所述伸缩臂3的旋转端与所述立柱2的上端可旋转地连接;所述伸缩臂3的移动端与所述悬吊盘4可转动地连接,见图1。
111.参考图1,所述悬吊盘4的同侧可旋转地连接有多个所述机械臂5,且多个所述机械臂5 的可围绕不同轴线的旋转轴进行旋转。其中至少一个机械臂5通过动力盒53安装器械(图中未示出),且一个机械臂5安装内窥镜(图中未示出)。内窥镜能够为外科医生提供手术位置的的二维或三维图像。外科医生观察上手术位置的二维或三维图像的同时,外科医生远程操纵器械以执行手术作业。
112.本发明创造的所述机械臂5由几个移动关节51结合几个转动关节52构成,利于术前机械臂5摆位。所述机械臂5的末端安装有器械的动力盒53。同时,由于只有一个悬吊盘4,结构简单且利于操作。
113.参考图2,所述立柱2的下端竖直安装在所述多模式车底座1上;所述立柱2可以沿着其长度方向进行升降运动。
114.如图2所示,所述立柱2包括下立柱座21、上立柱座22,及丝杆23;所述上立柱座22 的下端插设在所述下立柱座21内;所述丝杆23收容在所述下立柱座21与所述上立柱座围合的空间内;所述丝杆23的下端与所述下立柱座21固定连接,且其上端安装有螺母(图中未示出),所述螺母与所述上立柱座22固定连接;所述丝杆23连接丝杆电机24,所述丝杆电机24驱动所述丝杆23运动时,所述螺母3带动所述上立柱座22作同向升降运动。
115.为了提高上立柱座22升降的平稳性、及可靠性,在所述丝杆23的两侧设置有对所述丝杆23提供导向作用的导向机构25。优选地,所述导向机构25包括导向滑块252和导向滑轨 251,所述下立柱座21内壁对称固定安装有所述导向滑轨251,所述滑块与所述丝杆23相连,所述丝杆23上下运动时,所述导向滑块252沿着所述导向导轨251做同向滑动,起到导向的作用,确保所示立柱2上升和下降时比较平稳且可靠。
116.下面结合实施例详细阐述所述多模式车底座1。
117.图3和图4为多模式车底座的立体图,本多模式车底座至少包括底盘框架11、模式切换组件15,及可升降的支撑组件14。所述多模式车底座具有手动模式和电动模式,且手动操作所述模式切换组件15能够完成所述手动模式与所述电动模式相互切换;当处于电动模式时,车底座由第一动力电机133驱动可以进行移动,支撑组件14由电支撑电机141驱动可以进行升降运动;当处于手动模式时,车底座的移动、驻停,及支撑组件14的上升可通过手动完成。可见,由于多模式车底座具有电动模式和手动模式,即使失电情况下,支撑组件14能够上升,医护人员可以推车行走,使用方便。
118.参考图3和图4,底盘框架11是一个整体,用于装配零部件,以及整体的固定支撑。所述底盘框架11的底面安装有四个行走装置,安装在其底面的两个前角的行走装置是前行走装置12,安装在其底面的两个后角的行走装置是后行走装置13。
119.为了方便驻停,在每个所述前行走装置12和后行走装置13的旁边分别布置有所述支撑组件14;所述支撑组件14安装在所述底盘框架11的底面,见图7和图8。图5显示了多模式车底座驻停时所述多模式车底座的侧视图。当驻停时,四个所述支撑组件14下降,并与地面接触,起到稳定支撑多模式车底座的作用,确保驻停的可靠性。图6显示了多模式车底座
行走时所述多模式车底座的侧视图,行走时,四个所述支撑组件14上升,其悬空,与地面保持距离。
120.参考图5和图6,所述前行走装置12为万向轮;所述后行走装置13包括驱动轮131和动力装置132,所述动力装置132为所述驱动轮131提供动力,驱动所述驱动轮131移动,从而本发明创造的多模式车底座实现轻松移动。优选地,所述驱动轮131可设计为万向轮或定向轮。
121.图7为从上面看所述后行走装置底面时的立体图,图8为从底面看所述后行走装置底面时的立体图。从参考图7和图8可知所述动力装置132通过后安装板136安装在所述底盘框架11底面。
122.所述动力装置132主要作用是驱动所述驱动轮运行。本发明创造的动力装置132主要有如下三种实施方式。
123.参考图9,本发明创造的动力装置132第一种实施方式:所述动力装置包括第一动力电机133、第一动力减速机134和第一动力离合器135;所述第一动力电机133的后端安装有第轮131通过驱动轮安装架1311安装在所述底盘框架11的底面。当处于电动模式时,所述第一动力电机133通电,所述第一动力电机133带动所述第一动力减速机134转动,所述第一动力减速机134带动所述第一动力离合器135,所述第一动力离合器135带动驱动轮131转动,从而保证多模式车底座移动到指定位置。当手动模式时,可以实现所述第一动力离合器 135断开或耦合。
124.本发明创造的动力装置132第二种实施方式:所述动力装置包括第二动力电机(图中未示出)和第二动力减速机(图中未示出);所述第二动力电机与所述第二动力减速机相连,所述第二动力电机的输出轴或所述第二动力减速机的输出轴上安装有具有抱闸和离合作用的手动解锁装置(图中未示出);所述第二动力减速机与所述驱动轮相连。
125.本发明创造的动力装置132第三种实施方式:所述动力装置包括第三动力电机(图中未示出)、第三减速器(图中未示出)和第三动力离合器(图中未示出);所述第三动力电机与所述第三减速机相连,且两者之间安装有自锁装置(图中未示出);所述第三动力离合器安装在所述第三减速机的前端;或者,所述第三动力电机与所述第三减速机通过所述第三动力离合器相连。
126.本发明创造的动力装置132不局限于上述三种实施方式,通过改变上述零部件的连接关系,以及对抱闸和/或离合器集成在上述零部件上,均落入本发明创造的保护范围。
127.参考图13至图19,本发明创造的所述支撑组件包括螺杆1421,固定安装在所述螺杆1421 底部的脚撑1422、脚撑支架1423、电支撑动力组件和与所述电支撑动力组件相连接的手动支撑动力组件;电支撑动力组件相和手动支撑动力组件安装在支撑结构142上。在电动模式,所述的电支撑动力组件能够驱动所述螺杆1421上下运动,所述脚撑1422跟随所述螺杆1421 做同向运动。在手动模式,手动操作所述手动支撑动力组件,能够驱动所述螺杆1421向上运动,所述脚撑1422跟随所述螺杆1421做同向运动。
128.参考图15至图19,所述手动支撑动力组件包括升降轴1431、手动齿轮组,及与所述手动齿轮组啮合的传动件;所述手动齿轮组安装在所述升降轴1431上,所述手动齿轮组中安装有支撑离合结构,且所述支撑离合结构能够与所述升降轴1431同步运动。优选地,所述离合结构为支撑抱闸或支撑离合器。
129.在本实施例中,参考图18至图23,所述传动件为齿连续的第一齿条153,所述第一齿条 153朝向所述手动齿轮组的一侧具有连续的齿,所述齿能够与所述手动齿轮组啮合。当然所述第一齿条153也可以是仅仅与所述手动齿轮组配合的部分具有连续的齿;换句话说,仅仅所述第一齿条153的工作面具有连续的齿。所述手动齿轮组包括第二齿轮1433和第三齿轮 1434;所述第二齿轮1433或第三齿轮1434均可以安装在所述支撑离合结构上,只要满足所述支撑离合结构能够与所述升降轴1431同步运动即可。
130.具体地,参考图17至图19,所述第二齿轮1433与所述第一齿轮1432相啮合;所述第二齿轮1433安装在所述升降轴1431的一端,所述升降轴1431的另一端安装有所述第三齿轮 1434;所述第三齿轮1434与所述第一齿条153相啮合。当所述支撑离合结构为支撑抱闸144;安装时,先将所述第三齿轮1434通过紧固件与支撑抱闸144安装在一起,再安装在所述升降轴1431上;所述升降轴1431和螺杆1421均安装在所述脚撑支架1423上。所述支撑抱闸144 包括支撑抱闸144的主体和转子1441。
131.具体地,参考图17至图19,所述第三齿轮1434与所述支撑抱闸144的主体固定连接,所述支撑抱闸144内部的转子1441与所述升降轴1431采用径向固定连接,且轴向可以滑动。通电状态,只有转子1441与所述升降轴1431同步转动;失电状态,所述支撑抱闸144的主体和转子1441均与所述升降轴1431同步转动。当所述第二齿轮1433安装在所述支撑抱闸 144上时,其与所述支撑抱闸144的装配方式与上述第三齿轮1434安装在所述支撑抱闸144 上时的安装方式相同。
132.优选地,所述支撑抱闸144具有方内孔,所述升降轴1431一端为方型头,所述方内孔与所述方型头相配合,以实现支撑抱闸144与所述升降轴1431能够同步转动。
133.所述电支撑动力组件包括与电支撑电机141的电支撑齿轮143和第一齿轮1432,所述第一齿轮1432套设在所述螺杆1421上,且所述第一齿轮1432与所述电支撑齿轮143相啮合。
134.电动模式时,参考图14至图21,所述支撑抱闸144电枢吸合,转子1441处于松开状态。所述电支撑齿轮143转动,带动第一齿轮1432,第一齿轮1432带动所述第二齿轮1433,所述第二齿轮1433通过升降轴1431带动支撑抱闸144转动,而支撑抱闸144其余部分不动。此时与支撑抱闸144的主体相固定的所述第三齿轮1434不会进行运动。
135.手动模式时,即失电时,参考图14至图19,及图22和图23,所述支撑抱闸144内的电枢松开,所述支撑抱闸144内的转子1441处于抱紧状态,该状态支撑抱闸144的主体及转子 1441相当于一个整体。此时拉动所述第一齿条153,由于所述第一齿条153与所述第三齿轮 1434啮合,进而在拉动所述第一齿条153时,能带动所述第三齿轮1434运动;由于所述支撑抱闸144的主体与第三齿轮1434固定在一起,故在所述第三齿轮1434运动时,能够带动所述支撑抱闸144动作,所述升降轴1431同时跟随所述支撑抱闸144做同步运动;在所述升降轴1431运动时会带动所述第二齿轮1433运动;由于所述第二齿轮1433与所述第一齿轮 1432啮合,故在所述第二齿轮1433运动时,能够带动所述第一齿轮1432运动,所述第一齿轮1432会带动所述螺杆1421运动,所述脚撑1422跟随所述螺杆1421进行运动,从而实现了车驻停或运行。
136.优选地,为了配合安装空间,参考图18和图19,所述手动齿轮组还包括惰轮组,所述惰轮组设置在所述第二齿轮1433与所述第一齿轮1432之间;所述惰轮组包括至少一个惰
轮 1435和惰轮轴14350;所述惰轮1435安装在所述惰轮轴14350上;当包含一个惰轮1435时,所述第二齿轮1433与所述惰轮1435啮合,所述惰轮1435与所述第一齿轮1432啮合。在本实施例中,不对所述惰轮1435的个数做限制,可以根据空间及传动需要而设计惰轮1435的数目。
137.手动模式,所述支撑抱闸144的电枢松开,转子1441处于抱紧状态,该状态时转子1441 及支撑抱闸144的其余部分相当于一个整体。拉动所述第一齿条153,所述第一齿条153带动所述第三齿轮1434运动,所述第三齿轮1434带动所述支撑抱闸144运动,所述支撑抱闸 144驱动所述升降轴1431运动,所述升降轴1431带动所述第二齿轮1433运动,所述第二齿轮1433驱动所述惰轮1435运动,所述惰轮1435带动所述第一齿轮1432运动,所述第一齿轮1432带动所述脚撑1422上升。
138.参考图4、图24和图25,本发明创造的所述模式切换组件15包括第一连杆机构151和操纵机构16;所述第一连杆机构151的两侧分别固定连接有传动件;所述传动件与对应的所述动力装置132配合;当处于手动模式时,所述传动件能驱动对应的所述动力装置132进行运动;所述操纵机构16能够驱动所述第一连杆机构151在所述底盘框架11的底面进行移动。
139.进一步地,所述第一连杆机构151包括连杆1511和工字型架1512,见图17至图20。
140.如图17至图21所示,所述工字型架1512包括后横杆1514、前横杆1513,及连接所述后横杆1514和前横杆1513的中间连杆1515;所述后横杆1514的两端分别可转动地连接有所述连杆1511;所述前横杆1513的两端分别与对应的所述传动件固定连接;所述工字型架 1512与所述底盘框架11的底面通过导向机构155滑动连接,且滑动方向与所述传动件的长度方向相平行;所述操纵机构16与所述工字型架1512可转动地连接。优选地,所述中间连杆1515顶面设置有几个滑块1551和与所述滑块1551相匹配的导轨1552,所述滑块1551可以沿着所述导轨1552滑动,所述导轨1552通过紧固件固定在所述底盘框架11的底面。进一步地,所述后横杆1514和前横杆1513的中间连杆1515为一体成型机构。
141.参考图22至图25,当处于电动模式时,所述连杆1511能够使得所述动力装置132的离合器处于耦合状态;当处于手动模式时,所述连杆1511能够使得所述动力装置132的离合器处于断开状态。
142.下面将对所述动力装置132的第一种实施方式进行阐述。
143.参考图10至图13,所述第一动力离合器135包括离合齿轮箱1355、第一离合齿轮1351、第二离合齿轮1352、第三离合齿轮1353、拨杆1354,及驱动轮轴1356;所述的第一离合齿轮1351、第二离合齿轮1352、第三离合齿轮1353均安装在所述离合齿轮箱1355内;所述的第一离合齿轮1351和第二离合齿轮1352由花键连接,所述的第一离合齿轮1351、第二离合齿轮1352活动地安装在相应的轴上,具体地,所述的第一离合齿轮1351、第二离合齿轮1352 是活动件,可以沿着相应的轴发生移动。所述第一动力减速机134带动所述第一动力离合器 135时,所述第一动力减速机134先驱动所述第三离合齿轮1353运动,所述第三离合齿轮 1353驱动所述第二离合齿轮1352运动,然后所述第二离合齿轮1352驱动所述第一离合齿轮 1351运动。
144.优选地,为了提高所述的第一离合齿轮1351和第二离合齿轮1352耦合和解锁的效果,本案设计一个弹性单元1357抵在所述第一离合齿轮1351上,或抵在所述第二离合齿轮
1352 上。或者,在所述第一离合齿轮1351和第二离合齿轮1352都分别抵一个弹性单元1357。其中,当只有一个弹性件1357抵在所述第二离合齿轮1352上的时候,所述第一离合齿轮1351 和驱动轮轴1356需要固定连接或是做成一个整体。
145.参考图11、当处于电动模式时,所述拨杆1354使得第一离合齿轮1351、第二离合齿轮 1352和第三离合齿轮1353相配合,能实现传动,即所述第一动力离合器135处于耦合状态。
146.参考图12、图22和图23,当从电动模式处于向手动模式切换时,所述工字型架1512沿着所述底盘框架11的底面向着所述底盘框架11的底面的前端滑动,进而带动所连杆1511绕着所述连杆1511与所述后横杆1514的连接点转动,这时所述连杆1511带动所述拨杆1354 到解耦位置,使得所述拨杆1354使得第一离合齿轮1351、第二离合齿轮1352和第三离合齿轮1353失去配合,无法进行传动,即所述第一动力离合器135处于解耦状态。
147.当从电动模式处于向手动模式切换时,所述工字型架1512沿着所述底盘框架11的底面向着所述底盘框架11的底面的前端滑动,由于所述第一齿条153与所述前横杆1513固定连接,所述前横杆1513会带动所述第一齿条153向前运动。
148.从电动模式切换到手动模式的过程中,参考图12、图22和图23,拨杆1354由所述第一连杆机构151带动,使得第一动力离合器135断开。同时,带动所述第一齿条153运动,所述第一齿条153运动时能带动所述第三齿轮1434运动;所述第三齿轮1434运动时带动所述支撑抱闸144动作,所述升降轴1431同时跟随所述支撑抱闸144做同步运动;在所述升降轴 1431运动时会带动所述第二齿轮1433运动;所述第二齿轮1433运动时会所述第一齿轮1432 运动,所述第一齿轮1432带动所述螺杆1421运动,所述脚撑1422跟随所述螺杆1421进行运动,从而实现了车驻停或运行。
149.优选地,参考图14至图16,所述第二齿轮1433、第三齿轮1434和/或惰轮1435可安装在第一单向轴承1437结构上。若拉第一齿条153一次使得万向脚撑1422的抬升高度不够,因增加了第一单向轴承1437,故可以循环拉动第一齿条153,以达到万向脚撑1422到达要求的高度。
150.参考图4、图20和图23,本发明创造的所述模式切换组件15还包括第二连杆机构152。所述第一支杆1522的末端与所述第二支杆1521的首端可转动地连接,所述第二支杆1521的末端与所述工字型架1512可转动地连接。
151.如图26至图28所示,本发明创造的所述操纵机构16包括操纵杆161,所述操纵杆161 通过第二连杆机构152与所述工字型架1512可转动地连接。本发明创造对所述第二连杆机构 152包含的支杆数量不做限制,只要能达到拉动或推动所述第一连杆机构151移动即可。优选地,所述第一支杆1522的首端与所述第二轴163可转动地连接,其末端与所述第二支杆 1521的首端固定连接,所述第二支杆1521的末端与所述工字型架1512可转动地连接。
152.参考图28至图31,所述操纵机构16还包括操纵杆161、第一轴162和第二轴163;所述的第一轴162和第二轴163上分别套设有锥形齿轮164,且两个所述锥形齿轮164相啮合;所述操纵杆161与所述第一轴162固定连接;所述第二轴163的下端与所述第二连杆机构152 连接。模式切换时,只需手动推拉所述操纵杆161,推拉所述操纵杆161时,通过两个所述锥形齿轮配合可以带动所述第二连杆机构152运动。当所述第二连杆机构152的长度最长时,
所述第一齿条与齿轮组配合,此时保持电动模式;当所述第二连杆机构152的长度最短时,所述齿部1541与齿轮组配合,此时保持手动模式,医护人员可以推车行走。
153.参考图26至图29,所述操纵机构16还包括感应开关165和安装架166;所述的第一轴 162和第二轴163安装在所述安装架166上;且所述安装架166的上端的两端分别安装有一个所述感应开关165,其中一个所述感应开关对应当处于电动模式时所述操纵杆所在的位置,另一个所述感应开关对应当处于手动模式时所述操纵杆所在的位置;所述操纵杆161在两个感应开关165之间移动。
154.参考图30至图38,在本发明创造中,所述传动件除了设计为齿连续的第一齿条外,所述传动件还可以设计为工作面包括几个齿部1541”和几个缺口部1542”的第二齿条153”,几个所述的齿部1541”和缺口部1542”排成一列,且相邻的两个所述齿部1541”通过所述缺口部 1542”连接在一起,见图15至图18,同时所述手动齿轮组为可单向传动的齿轮组单元。
155.当所述模式切换组件15处于电动模式时,所述缺口部1542”与所述齿轮组单元配合,见图;所述模式切换组件15处于手动模式时,所述齿部1541”与所述齿轮组单元相啮合。
156.参考图35和图36,所述第一连杆机构151”包括连杆1511”和工字型架1512”,所述工字型架1512”包括后横杆1514”、前横杆1513”,及连接所述后横杆1514”和前横杆1513”的中间连杆1515”。当处于电动模式时,所述第二齿条153”的缺口部1542”与所述齿轮组单元配合,在这种情况下,即使所述齿轮组单元运动,也不会带动所述齿轮运动。当从电动模式处于向手动模式切换时,所述工字型架1512”通过导向机构155”沿着所述底盘框架11的底面向着所述底盘框架11的底面的前端滑动,由于所述第二齿条153”与工字型架1512”固定连接,所述工字型架1512”带动所述第二齿条153”向前运动。
157.参考图图35、37和图38,当切换为手动模式时,所述第二齿条153”与所述齿轮组单元由缺口部1542”与齿轮组单元配合,变为齿部1541”与齿轮组单元配合。当推动多模式车底座时,由于齿部1541”与齿轮组单元配合,第二齿条153”会带动所述齿轮组单元运动。所述齿轮组单元驱使所述支撑结构142”向远离地面的方向运动,所述支撑结构142”离开地面到上升至初始位置,这时只要对多模式车底座施加一推力,就可以多模式车底座移动,见图 4。
158.在本实施例中,参考图30至图34,所述齿轮组单元包括升降轴1431”、齿轮一1432”、齿轮二1433”和齿轮三1434”;齿轮三1434”与所述齿轮二1433”相啮合;所述齿轮二1433”安装在所述升降轴1431”的一端,所述升降轴1431”的另一端通过第二单向轴承1435”与所述齿轮一1432”安装在一起;所述齿轮三1434”与所述电支撑电机141”上的电机齿轮(图中未标出)啮合;所述支撑结构142”包括螺杆1421”和脚撑1422”;所述螺杆1421”的上端与所述齿轮三1434”连接,其下端与所述脚撑1422”固定连接;当所述齿轮三1434”转动时能够带动所述螺杆1421”进行上升。
159.进一步地,所述齿轮三1434”套设在所述螺杆1421”上,且所述螺杆1421”的下方套设有弹性件1436”,所述弹性件1436”上端抵在所述齿轮三1434”下端,所述弹性件1436”不仅能够起到限位的作用,还能通过改变自身长度起到调整位置的作用,避免在拉动第二齿条 153”过程中,发生第二齿条153”被卡主的情况。优选地,所述弹性件1436”为碟簧。
160.所述螺杆1421”的下端与所述脚撑1422”固定连接。故所述齿轮三1434”转动时会带动所述螺杆1421”向上运动,进而带动所述脚撑1422”上升以离开底面。
161.参考图37和图38,当从电动模式向手动模式切换时,所述工字型架1512”沿着所述底盘框架11的底面向着所述底盘框架11的底面的前端滑动,由于所述第二齿条153”与所述前横杆1513固定连接,所述前横杆1513会带动所述第二齿条153”向前运动。
162.从电动模式切换到手动模式的过程中,参考28至图32,及图35至图38,所述第二齿条 153”的齿部1541”与所述齿轮一1432”配合,所述第二齿条153”带动所述齿轮一1432”转动,所述齿轮一1432”带动第二单向轴承1435”转动,第二单向轴承1435”通过升降轴 1431”带动齿轮二1433”转动,齿轮二1433”带动齿轮三1434”转动,齿轮三1434”带动螺杆1421”以及固定在螺杆1421”下端的脚撑1422”一起上升,且只能上升。同时,拨杆 135”4由所述第一连杆机构151带动,使得离合器135”断开,且脚撑1422”也向上上升。
163.因所述齿轮二1433”安装在所述升降轴1431”的一端,所述升降轴1431”的另一端通过第二单向轴承1435”与所述齿轮一1432”安装在一起;故第二齿条153”带动所述齿轮一1432”转动时,只能带动万向脚撑1422”上升,高度不够的话,可以多次循环切换作业,以使得脚撑1422”上升至合适的高度。
164.第二连杆机构152”包括所述第一支杆1522”和所述第二支杆1521”。模式切换时,只需手动推拉所述操纵杆161,推拉所述操纵杆161时,通过两个所述锥形齿轮配合可以带动所述第二连杆机构152”运动。当所述第二连杆机构152”的长度最长时,所述缺口部1542”与齿轮组单元配合,此时保持电动模式;当所述第二连杆机构152”的长度最短时,所述齿部 1541”与齿轮组单元配合,此时保持手动模式,医护人员可以推车行走。
165.本发明创造还可以将所述手动齿轮组的齿和传动件上的齿之间的距离设计为可调的,这样两者可以自己调整齿以进行啮合。具体方案:一是把手动齿轮组或齿条上的齿做成活动的,或是两个上面的齿都做成活动的,就可以调节两者之间的相对位置;二是把手动齿轮组与齿条其中之一做成活动的,或是两者都做成活动的,也可以实现调节相对位置。
166.以上具体实施方式仅用以说明本实用新型的技术方案而非限制,尽管参照实例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1