辅助机器人或胸腔镜剑突下前纵隔手术的胸骨拉钩结构
1.本实用新型涉及一种辅助机器人或胸腔镜剑突下前纵隔手术的胸骨拉钩结构,属于医用设备技术领域。
背景技术:
2.前纵隔肿瘤包括胸腺上皮肿瘤,胸腺囊肿,畸胎瘤,生殖源性肿瘤,血液系统肿瘤等。这些分布于前纵隔区域的肿瘤,大多要求手术切除或手术活检。前纵隔位于心包前方胸骨后方,空间狭小,显露不佳,操作困难,容易损伤重要结构,发生术中大出血等并发症。传统的开放手术需要劈开胸骨,创伤大。目前微创手术已成为主流,其中包括胸腔镜辅助手术(即辅助胸腔镜剑突下前纵隔手术)和近几年出现的机器人辅助手术(即辅助机器人剑突下前纵隔手术)。胸腔镜辅助手术中,术者大多使用胸骨拉钩抬举胸骨,帮助扩大显露术区。机器人辅助手术尚缺乏可用的胸骨拉钩设计。由于机械臂及机器人设备平台的限制,胸腔镜辅助手术中的胸骨拉钩无法应用于机器人辅助手术,理由如下:
3.1、现有胸骨拉钩结构的直杆高度过高,容易干扰设备平台及机械臂;
4.2、现有胸骨拉钩结构的整体设计为横向安装固定,在机械臂使用时,胸骨拉钩结构会阻碍机械臂的使用。
技术实现要素:
5.本实用新型要解决的技术问题是:如何使得胸腔镜手术中使用的胸骨拉钩可以应用于机器人辅助手术中。
6.为了解决上述技术问题,本实用新型的技术方案是提供了一种辅助机器人或胸腔镜剑突下前纵隔手术的胸骨拉钩结构,其特征在于,包括可固定于手术床上的固定支架,固定支架与高度可调机构的一端连接,高度可调机构的另一端与连接折杆一端可拆卸连接,连接折杆另一端上设有可在连接折杆上滑动、可紧固、可拆卸的横杠位置调节器,横杠位置调节器上设有可在横杠位置调节器内滑动、可紧固、可拆卸的连接横杠,连接横杠上设有可在连接横杠上滑动、可紧固、可拆卸的拉钩调节器,拉钩调节器上设有可以升降的胸骨拉钩,胸骨拉钩通过拉线与拉钩调节器连接。
7.优选地,所述的高度可调机构包括连接直杆,固定支架与连接直杆一端可拆卸连接,连接直杆滑动设于固定支架内,固定支架上设有用于紧固连接直杆的紧固扳手。
8.优选地,所述的高度可调机构还包括延长杆,连接直杆另一端通过延长杆与连接折杆一端可拆卸连接。
9.优选地,所述的连接直杆另一端为六边形接口母口;连接折杆一端为六边形接口公口;延长杆一端为六边形接口公口,延长杆另一端为六边形接口母口;六边形接口母口与六边形接口公口相互匹配。
10.优选地,所述的固定支架包括固定支架本体,固定支架本体上设有可供连接直杆穿过的对穿孔,固定支架本体的一侧设有与对穿孔垂直且接通的直杆固定螺纹孔,直杆固
定螺纹孔内设有与其螺纹匹配的紧固扳手,固定支架本体上另一侧设有用于固定在手术床上的卡槽,卡槽与对穿孔相互垂直,卡槽上设有一个与其垂直且接通的卡槽螺纹孔,卡槽螺纹孔内设有用于压紧手术床的第一紧固旋钮。
11.优选地,所述的拉钩调节器包括拉钩基座,拉钩基座上设有可供连接折杆另一端和连接横杠对穿穿过的通道,拉钩基座的一侧设有与拉钩基座上通道垂直且相通的拉钩调节器螺纹孔,拉钩调节器螺纹孔内设有用于紧固连接折杆或连接横杠的第三紧固旋钮,第三紧固旋钮与连接横杠或连接折杆另一端上的孔相匹配;
12.横杠位置调节器包括横杠基座,横杠基座上分别设有可供连接折杆另一端对穿穿过的通道以及可供连接横杠对穿穿过的通道,横杠基座的一侧设有与横杠基座上通道垂直且相通的横杠位置调节器螺纹孔,横杠位置调节器螺纹孔内设有用于紧固连接折杆和连接横杠的第四紧固旋钮,第四紧固旋钮分别与连接横杠和连接折杆上的孔相匹配,横杠位置调节器螺纹孔与两个通道之间两两相互垂直,且横杠位置调节器螺纹孔贯穿横杠基座上的两个通道。
13.优选地,所述的连接折杆另一端上均布有多个孔;连接横杠上均布有多个孔;连接折杆上的孔与连接横杠上孔大小且间距相同。
14.优选地,所述的连接横杠和连接折杆上的孔为通孔或螺纹孔;连接横杠和连接折杆上的孔分别至少穿过连接横杠和连接折杆的一侧侧壁。
15.优选地,所述的连接折杆包括固定杆和伸缩杆,固定杆为折弯直角结构,固定杆一端与高度可调机构连接,固定杆另一端为空心结构,伸缩杆的一端可伸缩地设于固定杆另一端内,固定杆另一端的端部且位于垂直于固定杆的方向设有固定杆螺纹孔,固定杆螺纹孔内设有第二紧固旋钮;连接折杆另一端的多个孔均设于伸缩杆上;第二紧固旋钮与伸缩杆上的孔相匹配。
16.优选地,所述的拉钩调节器内设有可以转动的转轴,转轴的一端穿至拉钩调节器的外侧,并与手柄固定连接,转轴与拉线一端固定连接,拉线绕在转轴上,拉线另一端固定连接胸骨拉钩;拉钩调节器上设有用于紧固或松开手柄的紧固件。
17.与现有技术相比,本实用新型具有以下有益效果:
18.本实用新型的胸骨拉钩结构具有两用性,即可用于传统的胸腔镜剑突下前纵隔手术,也可用于机器人剑突下前纵隔手术。
19.本实用新型解决了现有的胸骨拉钩结构无法适用于机器人剑突下前纵隔手术的问题,通过可调节的胸骨拉钩高度和拉钩走线,避免了与机器人设备平台及机械臂相互干扰。
20.本实用新型的胸骨拉钩结构用于术中抬举胸骨,可有效增加胸骨后前纵隔的手术操作空间;对部分胸骨凹陷、前纵隔空间狭小、手术操作困难的患者,极大提高了手术安全性;对肿瘤较大的病例,降低了手术难度,减少了中转开放的机会,扩大了微创手术的适应证。
21.无论是胸腔镜剑突下手术,还是机器人剑突下手术,本实用新型的胸骨拉钩机构均可用于术中抬举胸骨,从而扩大胸骨后间隙,增加手术空间,降低手术难度,减少手术并发症,提高手术安全性。
附图说明
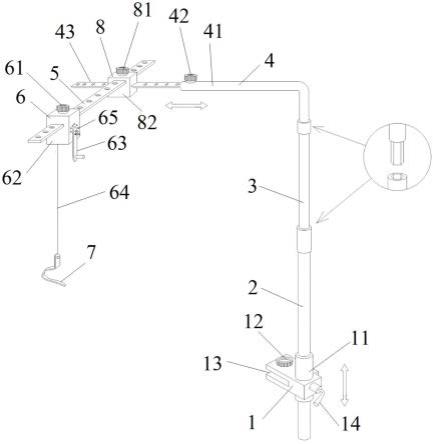
22.图1为本实用新型提供的一种辅助机器人或胸腔镜剑突下前纵隔手术的胸骨拉钩结构的示意图;
23.图2为本实用新型的胸骨拉钩结构应用在机器人手术中的使用示意图;
24.图3为图2的俯视图;
25.图4为图2的左视图。
具体实施方式
26.为使本实用新型更明显易懂,兹以优选实施例,并配合附图作详细说明如下。
27.本实用新型提供了一种辅助机器人或胸腔镜剑突下前纵隔手术的胸骨拉钩结构,如图1所示,其包括固定支架1、连接直杆2、延长杆3、连接折杆4、连接横杠5、拉钩调节器6、胸骨拉钩7,固定支架1与连接直杆2一端可拆卸连接,连接直杆2另一端通过延长杆3与连接折杆4一端可拆卸连接(或直接与连接折杆4一端可拆卸连接),连接折杆4另一端上设有可在连接折杆4上滑动、可紧固、可拆卸的横杠位置调节器8,横杠位置调节器8上设有可在横杠位置调节器8内滑动、可紧固、可拆卸的连接横杠5,连接横杠5上设有可在连接横杠5上滑动、可紧固、可拆卸的拉钩调节器6,拉钩调节器6上设有可以升降的胸骨拉钩7。胸骨拉钩7通过拉线64与拉钩调节器6连接。
28.固定支架1包括固定支架本体11,固定支架本体11上设有可供连接直杆2穿过的对穿孔,固定支架本体11的一侧设有与对穿孔垂直且接通的直杆固定螺纹孔,直杆固定螺纹孔内设有与其螺纹匹配的紧固扳手14,用于顶住连接直杆2,使得连接直杆2紧固在固定支架本体11内,固定支架本体11上另一侧设有与对穿孔垂直的卡槽13,卡槽13为周围三侧开口的开口槽,使得卡槽13可以夹在手术床的床架上,卡槽13上设有一个与其垂直且接通的卡槽螺纹孔,卡槽螺纹孔内设有用于压紧手术床的第一紧固旋钮12。
29.连接折杆4包括固定杆41和伸缩杆43,固定杆41为折弯直角结构,固定杆41一端与连接直杆2或延长杆3连接,固定杆41另一端为空心结构,伸缩杆43的一端设于固定杆41另一端内,固定杆41另一端的端部且位于垂直于固定杆41的方向设有固定杆螺纹孔,该固定杆螺纹孔内设有第二紧固旋钮42,伸缩杆43上均布有多个与第二紧固旋钮42大小相匹配的孔,伸缩杆43上的孔为通孔或螺纹孔。伸缩杆43上的孔至少穿过伸缩杆43的一侧侧壁,还可以直接对穿伸缩杆43径向的两侧侧壁。伸缩杆43可以在固定杆41另一端内伸缩,并通过第二紧固旋钮42紧固。
30.连接横杠5上设有多个与伸缩杆43上孔大小尺寸相同的孔。
31.拉钩调节器6包括拉钩基座62,拉钩基座62上设有可供伸缩杆43和连接横杠5对穿穿过的通道,拉钩基座62的一侧设有与拉钩基座62上通道垂直且相通的拉钩调节器螺纹孔,拉钩调节器螺纹孔内设有与连接横杠5或伸缩杆43上孔相匹配的第三紧固旋钮61,拉钩基座62内设有可以转动的转轴,转轴的一端穿至拉钩基座62的外侧,并与手柄63固定连接,转轴与拉线64一端固定连接,拉线64绕在转轴上,拉线64另一端固定连接胸骨拉钩7。其中,拉线64为钢丝线。伸缩杆43或连接横杠5可在拉钩基座62上的通道内伸缩活动,并在需要的位置,通过第三紧固旋钮61紧固连接。
32.手柄63上设有紧固件65,手柄63通过紧固件65与拉钩基座62紧固时,手柄63无法
相对拉钩基座62转动。
33.紧固件65包括销轴或螺钉,拉钩基座62上连接手柄63处的周围设有一圈小孔,手柄63上设有一个与小孔相匹配的孔,当手柄63转动至拉钩基座62上对应位置,通过销轴或螺钉依次插入手柄63上的孔以及拉钩基座62上其中的一个小孔内,即可将手柄63锁定。
34.横杠位置调节器8包括横杠基座82,横杠基座82上设有可供伸缩杆43对穿穿过的通道以及可供连接横杠5对穿穿过的通道,横杠基座82的一侧设有与横杠基座82上通道垂直且相通的横杠位置调节器螺纹孔,横杠位置调节器螺纹孔内设有与连接横杠5和伸缩杆43上孔相匹配的第四紧固旋钮81,横杠位置调节器螺纹孔与两个通道之间两两相互垂直,且横杠位置调节器螺纹孔贯穿横杠基座82上的两个通道,使得第四紧固旋钮81可以依次贯穿伸缩杆43上的孔和连接横杠5上的孔。伸缩杆43和连接横杠5分别可在横杠基座82上的两个通道内伸缩活动,并在需要的位置,通过第四紧固旋钮81将伸缩杆43和连接横杠5一起紧固连接。
35.固定支架1用于将本实用新型的胸骨拉钩结构固定于手术床上,固定支架1的中间可插入连接直杆2;
36.连接直杆2一端与固定支架1相连,以保持稳定,连接直杆2另一端与延长杆3或者连接折杆4相连,连接直杆2另一端上与延长杆3或连接折杆4连接处的接口为六边形接口母口,六边形结构的设计为了防止连接直杆2与延长杆3或连接折杆4的相对转动;
37.延长杆3仅用于胸腔镜剑突下手术中,增加连接折杆4的高度,从而增加胸骨拉钩7高度。延长杆3一端为六边形接口公口,六边形接口公口与连接直杆2另一端的六边形接口母口相连;延长杆3另一端与连接折杆4连接处的接口为六边形接口母口;
38.连接折杆4一端为六边形接口公口,该六边形接口公口与连接直杆2或延长杆3上的六边形接口母口相连。连接折杆4另一端为可伸缩结构,并有多个圆形螺纹口,可根据术中所需,选择伸缩长度和所需螺纹口,使用第二紧固旋钮42(固定螺丝)将连接横杆5或拉钩调节器6固定于该位置;
39.连接横杠5仅用于机器人剑突下手术,可调整胸骨拉钩7的横向位置。其上预留多个圆形螺纹口,通过使用固定螺丝,一端与连接折杆4相连,另一端固定拉钩调节器6;
40.拉钩调节器6包括固定于连接折杆4或连接横杠5上的拉钩基座62,拉钩基座62上半部横向预留连接折杆4或连接横杠5穿过的通道,纵向预留使用固定螺丝(即第三紧固旋钮61)的通道(即与第三紧固旋钮61相匹配的螺纹孔)。拉钩基座62下方外侧设有手柄63,用于控制拉线64,调整胸骨拉钩7高度;
41.胸骨拉钩7上端与拉线64连接,下端为钩子。钩子上半部分为弧形结构,下半部分为直线结构,直线结构的尖端稍尖,便于穿破胸壁。
42.本实用新型的胸骨拉钩结构用于辅助胸腔镜剑突下前纵隔手术时:
43.安装过程如下:
44.将固定支架1夹在手术床右侧(即为躺在手术床上病人的右侧),并转动第一紧固旋钮12,使得固定支架1夹紧在手术床上,连接直杆2一端插入固定支架1内,并通过转动紧固扳手14将两者紧固,延长杆3一端插入连接直杆2另一端内,连接折杆4一端插入延长杆3另一端内,使用螺丝(即第三紧固旋钮61)固定拉钩调节器6于连接折杆4上的伸缩杆43上,使得拉钩调节器6上的胸骨拉钩7悬挂在患者上方。
45.使用过程如下:
46.松开第三紧固旋钮61,使得第三紧固旋钮61下端从伸缩杆43的孔内出来,将胸骨拉钩7沿着伸缩杆43向手术床左侧水平展开,患者呈剪刀位平卧于手术床上。当胸骨拉钩7位于患者胸骨旁第二肋位置时,旋拧第三紧固旋钮61,使得第三紧固旋钮61下端进入伸缩杆43上此时对应的孔内,并将固定手柄63的紧固件65松开,并下拉胸骨拉钩7,于患者胸骨旁第二肋间,并置入胸腔内,从胸骨后方向上提拉胸骨,转动手柄63,使得钢丝线(即拉线64)拉动胸骨拉钩7,至合适位置后,将手柄63通过紧固件65固定,从而使胸骨进一步上提后,使得术中可见胸骨后前纵隔空间明显增大。
47.如图2-图4所示,本实用新型的胸骨拉钩结构用于辅助机器人剑突下前纵隔手术时:
48.安装过程如下:
49.将固定支架1夹在手术床头端(即手术床上位于患者头部处),并转动第一紧固旋钮12,使得固定支架1夹紧在手术床上,连接直杆2一端插入固定支架1内,并通过转动紧固扳手14将两者紧固,连接折杆4一端插入连接直杆2另一端内,使用螺丝(即第四紧固旋钮81)固定连接横杠5于连接折杆4上的伸缩杆43上,使用螺丝(即第三紧固旋钮61)固定拉钩调节器6于连接横杠5上,使得拉钩调节器6上的胸骨拉钩7悬挂在患者上方。
50.使用过程如下:
51.患者平卧于手术床上,松开第四紧固旋钮81,使得第四紧固旋钮81下端从伸缩杆43的孔内出来,将横杠位置调节器8带动连接横杠5沿着伸缩杆43向手术床足端水平展开,直至手术时需要的纵向位置,旋拧第四紧固旋钮81,使得旋拧第四紧固旋钮81下端进入伸缩杆43上此时对应的孔内。再松开第三紧固旋钮61,使得第三紧固旋钮61下端从连接横杠5的孔内出来,将胸骨拉钩7沿着连接横杠5向手术床左右两侧横向水平移动,当胸骨拉钩7位于患者胸骨旁第二肋位置时,旋拧第三紧固旋钮61,使得第三紧固旋钮61下端进入连接横杠5上此时对应的孔内,并将固定手柄63的紧固件65松开,并下拉胸骨拉钩7,于患者胸骨旁第二肋间,并置入胸腔内,从胸骨后方向上提拉胸骨,转动手柄63,使得钢丝线(即拉线64)拉动胸骨拉钩7,至合适位置后,将手柄63通过紧固件65固定,从而使胸骨进一步上提后,使得术中可见胸骨后前纵隔空间明显增大。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1