手术机器人的开合关节的制作方法
1.本实用新型涉及医疗器械领域,尤其是一种手术机器人的开合关节。
背景技术:
2.近年来,随着医疗科技的进步,手术机器人越发广泛地应用于医疗领域内。手术机器人包括供医生直接操作的医生控制台以及受控于医生控制台的末端执行器。开合关节布置于医生控制台的主操作臂末端,医生通过开合关节遥操控末端执行器械完成夹持、剪切、缝合打结等操作。若开合关节不能对医生提供触觉或力的反馈,这会使得末端执行器接触到人体组织时,医生手部无法感知到力的变化。此外,长时间操控无触觉或力反馈的开合关节,还会降低医生手部的舒适度与稳定性,这些都在一定程度上降低了手术质量。
技术实现要素:
3.针对上述的无触觉或力反馈的开合关节存在的相关缺陷,本实用新型的目的是提供一种手术机器人的开合关节。
4.为了达到上述的目的,本实用新型提供以下技术方案:一种手术机器人的开合关节,包括:关节座(包括枢轴座和枢轴盖),安装在手术机器人的主操作臂末端;一对指夹,后端部分别可枢轴转动连接在所述的关节座上,所述的一对指夹之间相互传动且能够同步开合,所述的一对指夹包括第一指夹和第二指夹;第一储能部件,安装在所述的第一指夹与所述的关节座之间,当所述的第一指夹与所述关节座的夹角小于第一夹角时,所述的第一储能部件被压缩,并且所述的第一储能部件向所述的第一指夹提供一远离所述的关节座的第一作用力;第二储能部件,安装在所述的第二指夹与所述的关节座之间,当所述的第二指夹与所述关节座的夹角小于第二夹角时,所述的第一储能部件和第二储能部件均被压缩,并且所述的第一储能部件和第二储能部件提供的力形成合力,该合力向所述的第一指夹以及第二指夹提供一个远离所述的关节座的第二作用力,所述的第一夹角大于所述的第二夹角。
5.在一个实施例中,所述的第一储能部件和第二储能部件均为扭簧,所述关节座的后端开设有一对安装孔,所述的第一储能部件和第二储能部件分别固定安装在一对所述的安装孔内。
6.在一个实施例中,所述的第一储能部件包括第一固定端以及第一活动端,所述的第二储能部件包括第二固定端以及第二活动端,所述的第一固定端和第二固定端均固定连接在所述的关节座内,所述的第一活动端抵在所述的第一指夹上的凹槽内,所述的第二活动端相对于所述的第二指夹悬空。
7.还可以进一步优选地,所述的关节座限定有一轴心线,一对所述安装孔之间的连线垂直于所述的轴心线,所述的关节座上具有分别位于一对所述的安装孔侧部的第一限位台和第二限位台,自然状态下,所述的第一储能部件的第一活动端抵靠在所述的第一限位台的内侧面上,所述的第二储能部件的第二活动端抵靠在所述的第二限位台的内侧面上,
所述的第一夹角等于所述的第一限位台的内侧面与所述的轴心线的夹角,所述的第二夹角等于所述的第二限位台的内侧面与所述的轴心线的夹角。
8.在一个实施例中,所述关节座的后端部固定设置有一对销轴,所述的第一指夹和第二指夹的后端部分别可转动地套设在所述的一对销轴上,所述的第一指夹和第二指夹后端部的外周面至少部分为齿轮面,所述的第一指夹和第二指夹的齿轮面相互啮合传动。
9.在一个实施例中,所述的关节座具有一沿前后方向延伸的枢轴主体,所述的枢轴主体包括枢轴座与可拆卸地连接于枢轴座上的枢轴盖,所述的一对安装孔开设在所述的枢轴盖上,所述的一对销轴固定设置在所述的枢轴座上。
10.在一个实施例中,所述的第一储能部件和第二储能部件分别被施加以预紧力地安装在相应所述的安装孔内。还可以进一步优选地,所述的第一储能部件被配置成,当所述的第一指夹距离所述的关节座的角度等于所述的第二夹角时,所述的第一作用力等于所述的第二储能部件的预紧力。
11.在一个实施例中,所述的第一夹角在15-25
°
之间,所述的第二夹角在3-6
°
之间。
12.在一个实施例中,至少一个所述的指夹上设置有磁性元件,所述的关节座上设置有能够根据所述的磁性元件远近生成相应大小的电信号的编码器。
13.相较于现有技术,本实用新型技术方案所提供的手术机器人开合关节布置有第一、第二储能部件,该第一、第二储能部件能够随医生手势角度的变化,向一对指夹提供变化的二级阻力,以反馈医生的手部操作。
附图说明
14.图1为本实用新型所提供的手术机器人开合关节的立体示意图1;
15.图2为图1所示的手术机器人开合关节的立体示意图2;其中,手柄未被示出;
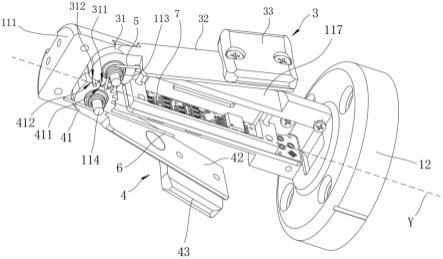
16.图3为图1所示的手术机器人开合关节的立体示意图3,其中,手柄与枢轴盖均未被示出;
17.图4为图1所示的手术机器人开合关节的枢轴盖与第一、第二储能部件的装配示意图;
18.图5为图4所示的枢轴盖的立体示意图;
19.图6为图4所示的第一、第二储能部件处于自然状态时的示意图。
20.图中标志:
21.100、手术机器人开合关节;
22.1、关节座;11、枢轴主体;111、枢轴座;112、枢轴盖;113、第一销轴;114、第二销轴;115、第一安装孔;116、第二安装孔;117、指夹槽;118、第一限位台;119、第二限位台;12、安装座;
23.2、手柄;21、控制键;
24.3、第一指夹;31、第一近轴端;311、第一齿轮面;312、第一限位齿;
25.32、第一夹臂;33、第一远端;34、第一指套;
26.4、第二指夹;41、第二近轴端;411、第二齿轮面;412、第二限位齿;
27.42、第二夹臂;43、第二远端;44、第二指套;
28.5、第一储能部件;51、第一固定端;52、第一活动端;
29.6、第二储能部件;61、第二固定端;62、第二活动端;
30.7、信号输出器;
31.y、轴心线;α1、第一夹角;α2、第二夹角。
具体实施方式
32.为详细说明实用新型的技术内容、构造特征、所达成目的及功效,下面将结合实施例并配合附图予以详细说明,其中本说明书中所述的“上”、“下”等位置关系分别与附图1中的上、下方对应。
33.本实用新型公开一种手术机器人开合关节(以下简称开合关节),该开合关节能够捕捉医生的手部动作并将其输出给手术机器人的末端执行器械,从而控制末端执行器进行夹持、剪切、止血、缝合、打结等操作。
34.图1-3示出了本实用新型所提供的开合关节100,该开合关节100包括安装于手术机器人的操作端的关节座1、位于关节座1后部位置的手柄2、可转动地连接于关节座1上的第一指夹3与第二指夹4以及用于提供力反馈的第一储能部件5与第二储能部件6。
35.如图2所示,关节座1限定有一轴心线y并包括安装座12以及可绕轴心线y转动地连接于安装座12上的枢轴主体11。轴心线y穿过安装座12的中心处,安装座12位于枢轴主体11的前侧,枢轴主体11沿着该轴心线y延伸且大致呈一圆柱体。所述安装座12与手术机器人的主操作臂末端连接。
36.结合图3-4,枢轴主体11包括枢轴座111与可拆卸地连接于枢轴座111上的枢轴盖112。枢轴座111的后部固定设置有左右相对的第一销轴113与第二销轴114,枢轴盖112的后部开设有左右相对的第一安装孔115与第二安装孔116,第一销轴113与第二销轴114均沿着上下方向延伸并伸入相应侧的安装孔内。其中,第一、第二销轴的连线以及第一、第二安装孔中心处的连线均垂直于轴心线y。
37.第一指夹3包括位于后部的第一近轴端31、远离第一近轴端31的第一远端33以及位于第一近轴端31与第一远端33之间的第一夹臂32。第一远端33固定连接有第一指套34,第一指套34可供医生手指穿过,以便于医生开合第一指夹3。
38.第一近轴端31位于枢轴主体11的内侧并可转动地套接于第一销轴113上。第一近轴端31的外周壁面上布置有第一齿轮面311以及邻接于该第一齿轮面311后侧的第一限位齿312。第一齿轮面311被配置朝向第二销轴113且其转动中心与第一销轴113的中心位置相重合,第一限位齿312相对第一齿轮面311径向向外凸出。
39.第二指夹4包括位于后部的第二近轴端41、远离第二近轴端41的第二远端43以及位于第二近轴端41与第二远端43之间的第二夹臂42。第二远端43固定连接有第二指套44,第二指套44可供医生手指穿过,以便于医生开合第二指夹4。
40.第二近轴端41位于枢轴主体11的内侧并可转动地套接于第二销轴114上。第二近轴端41的外侧壁面上布置有第二齿轮面411以及邻接于该第二齿轮面411后侧的第二限位齿412。第二齿轮面411被配置朝向第一销轴113且其转动中心与第二销轴114的中心位置相重合,第二限位齿412相对第二齿轮面411径向向外凸出。
41.第一齿轮面311与第二齿轮面411相啮合,从而实现第一指夹3与第二指夹4同步转动。第一指夹3与第二指夹4以轴心线y为界呈对称布置,即在同一时间,第一指夹3与第二指
夹4分别同枢轴主体11所呈的夹角相等。
42.枢轴主体11的左右两侧开设有分别适配于第一指夹3与第二指夹4的一对指夹槽117。第一、第二指夹均具有远离枢轴主体11的起始位置(如图2)与收纳于相应侧指夹槽117内的终止位置(图中未示出)。当第一、第二指夹位于起始位置时,第一限位齿312与第二限位齿412相互抵接,以限定第一、第二指夹与关节座1的最大夹角;当第一、第二指夹位于终止位置时,第一、第二指夹分别与关节座1呈大致0
°
的夹角。
43.第一指夹3与第二指夹4中的至少一个布置有磁性元件(图中未标示出)。开合关节100还包括位于枢轴主体11内部的信号输出器7,该信号输出器7上集成有编码器(图中未标示出),该编码器能够基于磁性元件与自身的距离对外生成强弱不同的电信号。可以理解地,基于该编码器与磁性元件的配合,信号输出器7便可识别第一、第二指夹与枢轴主体11所呈夹角的角度,从而向末端执行器发出相应的命令。在实际实现时,该编码器可采用霍尔传感器。
44.参阅3-5,第一储能部件5为一扭簧,其包括固定安装于第一安装孔115内的第一固定端51以及伸出关节座1的第一活动端52,第一活动端52位于第一夹臂32与枢轴主体11之间。当第一指夹与枢轴主体之间的夹角等于第一夹角时,第一活动端52刚好位于在第一指夹内侧的凹槽内。
45.枢轴盖112在第一安装孔115的外围处设置有第一限位台118,第一活动端52与该第一限位台118的内壁面相抵接。第一限位台118被配置成其内壁面与轴心线y呈一第一限位夹角(图中未示出),以限定第一活动端52与枢轴主体11所成的最大夹角。
46.结合图6,第一储能部件5在自然状态下,第一活动端52与枢轴主体11呈一第一夹角α1,可以理解地,该第一夹角α1的角度与第一限位夹角的角度相等。第一储能部件5被配置成,当第一活动端52被压缩时,即第一活动端52与枢轴主体11所呈角度小于第一夹角α1时,第一储能部件5向外提供一个远离枢轴主体11的第一作用力,第一作用力从关节座指向外侧。可以理解地,第一活动端52与枢轴主体11所呈角度越小,该第一作用力越大,即第一作用力是一个随第一储能部件变形而变化的力,第一作用力成为医生在闭合一对指夹时的阻力。
47.在一个实施例中,第一夹角α1角度位于15
°‑
25
°
之间。再进一步地,为使得第一、第二指夹在外力撤销时能够自动回复至起始位置,第一、第二指夹在起始位置时与枢轴主体11所呈的最大角度与该第一夹角α1相等。在该情况下,第一指夹3始终与第一活动端52相抵接。
48.继续参阅3-5,第二储能部件6为一扭簧,其包括固定安装于第二安装孔116内的第二固定端61以及伸出关节座1的第二活动端62,第二活动端62位于第二夹臂42与枢轴主体11之间,且第二活动端62与第二夹臂以及枢轴主体均不构成连接关系,而是自由悬空的。
49.枢轴盖112在第二安装孔116的外围处设置有第二限位台119,第二活动端62的后部与该第二限位台119的内壁面相抵接。第二限位台119被配置成其内壁面与轴心线y呈一第二限位夹角(图中未示出),以限定第二活动端62与枢轴主体11所成的最大夹角。
50.结合图6,第二储能部件6在自然状态下,第二活动端62与枢轴主体11呈一第二夹角α2,可以理解地,该第二夹角α2与第二限位夹角角度相等。第二储能部件6只有在第二指夹与枢轴主体之间的夹角小于第二夹角α2时,才会被压缩。当第二指夹向内挤压第二活动
端62时,第二储能部件释放一个回复力,此时,第一储能部件和第二储能部件均被压缩,由于第一指夹与第二指夹之间是传动连接且同步转动的,因此设计时只需要考虑第一、第二储能部件向一对指夹提供的合力大小即可,本文将第一、第二储能部件回复力的合力称为第二作用力。可以理解地,第二活动端62与枢轴主体11所呈角度越小,该第二作用力越大,且第二作用力是一个大于第一作用力的力,因此本技术的开合关节可以在医生闭合一对指夹,使第二指夹与枢轴主体之间的夹角小于第二夹角时,提供一个非线性的跳跃增加的阻力,成为二级阻力。
51.在一个实施例中,第二夹角α2角度位于3
°‑6°
之间。当第二指夹4与枢轴主体11所呈夹角大于第二夹角α2时,第二活动端62相对第二指夹4悬空。
52.需要说明的是,本技术中的自然状态,意指第一、第二储能部件安装于相应的安装孔内且无其它外力施加的状态。可以理解地,由于第一、第二限位台对相应活动端的限制作用,在该自然状态下,第一、第二储能部件仍然处于压缩状态,即第一、第二储备部件分别被施加一预紧力地安装于相应的安装孔内。其中,当第一活动端52与枢轴主体11所呈的夹角与第二夹角α2相等时,其提供的第一作用力与施加于第二储能部件6的预紧力相等。
53.继续参阅图1,手柄2呈c型并从上下两侧包覆枢轴主体11的后侧,第一、第二指夹分别从左右两侧露出。手柄2的上部设置有多个控制键21,各控制键21均被配置成适于医生单指操作。控制键21的具体功能可视实际需求而定,如控制末端执行器切割的电切键、控制手术器械连通以及断开的离合键等等。
54.以下说明开合关节100的工作原理:当医生握持开合关节100时,医生手心朝向手柄2并可通过手柄2控制枢轴主体11绕轴心线y转动;食指位于手柄2的上侧,以控制多个控制键21;其拇指与中指分别穿过第一指套34与第二指套44,以开合第一、第二指夹。
55.当第一、第二指夹与枢轴主体11所呈的夹角小于第一夹角α1时,第一储能部件5向外提供第一作用力,借由该第一作用力的大小变化,医生可通过手部感知末端执行器的动作幅度;当第一、第二指夹与枢轴主体11所呈的夹角小于第二夹角α2时,第一、第二储能部件合力向外提供第二作用力,以提醒医生末端执行器处于接触或即将接触人体组织;当医生的手部脱离第一、第二指夹时,第一、第二指夹即在第一作用力的作用下回复至起始状态。
56.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本技术的核心思想和范围的前提下,本实用新型还会有各种变化和改进,本实用新型要求保护范围由所附的权利要求书、说明书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1