关节成型执行器及外科手术系统的制作方法
1.本公开涉及医疗器械领域,具体涉及关节成型执行器及外科手术系统。
背景技术:
2.关节置换手术主要包括膝关节置换术和髋关节置换术。全膝关节置换术中,需要对构成膝关节的股骨远端和胫骨进行加工以形成适合假体植入的形状和尺寸。对股骨和胫骨的加工主要是用锯切割加工出多个平面。被加工后的骨的形状基本决定了膝关节假体植入的精度,因此每个平面的加工精度决定了假体植入的精度。全髋关节置换手术中,需要对构成髋关节的髋臼和股骨近端加工以形成适合假体植入的形状和尺寸。髋关节成型包括髋臼窝的磨削成型以及股骨头近端的截骨和扩髓。髋关节置换的精度涉及髋臼侧的假体植入精度和股骨侧的假体植入精度。髋臼侧的假体植入精度依赖于髋臼窝的加工精度和植入过程中对髋臼假体的植入角度和深度的控制精度。股骨侧的假体植入精度依赖于股骨侧的扩髓精度。
3.加工髋臼窝时,需要用磨削工具对髋臼窝进行磨削。磨削工具一般包括半球形的锉头、具有一定长度的接杆、套设在接杆外的握持套筒和手枪形的动力工具。接杆一端连接锉头,另一端连接在手枪形工具的动力输出端。使用时,外科医生一手握住手枪形动力工具的把手,另一手握住握持套筒,将锉头插入髋臼中并沿接杆的轴向施力以磨削髋臼表面的骨组织。磨削过程中,外科医生通过经验控制接杆与骨盆的角度以及磨削的深度以控制加工精度。
4.髋臼窝加工完成后,需要用持杯装置将假体杯植入髋臼。持杯装置包括直接杆或带弯头的接杆和锤子。接杆的一个末端连接假体杯,另一个末端用于接受锤子的打击,接杆中间供外科医生握持。使用时,外科医生握持住接杆中间以把握接杆相对于骨盆的角度,另一端由锤子锤击以将假体杯压入髋臼窝。植入过程中,伴随每次锤击持杯装置整体会随着假体杯进入髋臼窝而沿轴向位移。
5.近年来,使用机器人系统辅助手术的技术日趋成熟,如马可外科(mako surgical)公司销售的膝关节手术机器人。一般地,机器人系统包括机械臂、导航定位系统和控制系统。机械臂相当于外科医生的手臂,可以把持手术工具并以较高的精度定位手术工具。导航定位系统相当于外科医生的眼睛,可以实时测量手术工具和患者组织的位置。控制系统相当于外科医生的大脑,内部储存手术规划。控制系统根据术中通过导航定位系统获取的信息计算机械臂的路线和/或应达的位置,可以主动控制机械臂运动,或者通过力反馈模式设置机械臂的虚拟边界后由人工推动机械臂沿虚拟边界限定的路线、面或体移动。马可外科公司的机器人系统中,机械臂末端悬挂一台电动摆锯。手术中由机械臂将摆锯定位至膝关节附近,并由外科医生操作启动和推动电动摆锯切割骨骼,从而为假体植入准备出安装位置。机器人辅助操作的膝关节置换手术相对于传统膝关节置换手术有诸多优势。如,对外科医生的经验依赖降低;减少因传统机械定位结构使用造成的医源性伤害。
6.然而,上述机器人系统可能不适于髋关节置换手术等手术类型,因为如前所述髋
关节手术中需要多种操作(例如对髋臼扩孔、敲击髋臼杯、股骨侧扩髓),对应地需要不同构造的手术工具。设计成能适应多种工具的系统则需要多种末端执行器,而且在手术程序期间移除和安装不同类型的执行器到机械臂上会增长手术时间。另外敲击髋臼杯至髋臼窝的过程会产生高冲击力,其可能会损坏精密的机械臂。
7.因此需要一种适用于机器人系统的髋关节手术的执行器。
8.马可外科公司还提供了一种用于髋关节置换的手术机器人,中国发明专利cn102612350b公开了其构成。在使用该手术机器人进行髋臼磨削时,需要先将磨削工具安装至机械臂末端的把持结构,再将动力装置连接至磨削工具。该把持结构(套筒)还用于连接持杯器以进行髋臼假体安装的操作,因此在完成髋臼磨削操作后,需先将动力装置拆下,再拆下磨削工具,最后再将持杯器安装至把持结构。并且在安装过程中,连接磨削工具的杆需要贯穿套筒,上端连接动力装置,下端连接磨削工具(如髋臼锉)。安装或拆卸过程中,杆的一端需从套筒的一端插入或抽出,此时二者串连的长度很大,需要很大的操作空间。上述过程操作较为繁琐,安装过程或拆卸过程中需要较大的操作空间。
技术实现要素:
9.本公开提供一种关节成型执行器及手术系统,解决了现有技术中进行髋关节成型手术不便的问题。
10.本公开的第一方面提供一种关节成型执行器,包括动力装置及工具组件,动力装置包括机器人连接端和内设的动力组件,机器人连接端用于连接至机器人的机械臂末端,动力组件包括动力源和输出轴,输出轴与动力源连接;工具组件包括连接部和手术工具,手术工具可转动地设置于连接部,工具组件通过连接部可拆卸地设置于动力装置,其中,工具组件通过连接部与动力装置连接时,手术工具与输出轴形成接合以接收输出轴输出的转动运动。
11.在第一种可能的实施方式中,手术工具相对于输出轴沿轴向的插入或套接动作形成接合。
12.结合上述可能的实现方式,在第二种可能的实施方式中,手术工具和输出轴被构造为花键连接。
13.结合上述可能的实现方式,在第三种可能的实施方式中,手术工具与动力装置之间还设置有径向定位结构。
14.结合上述可能的实现方式,在第四种可能的实施方式中,径向定位结构设置于手术工具与输出轴之间。
15.结合上述可能的实现方式,在第五种可能的实施方式中,径向定位结构为输出轴与手术工具之间的轴孔配合。
16.结合上述可能的实现方式,在第六种可能的实施方式中,连接部与动力装置通过旋合结构连接以形成对连接部的轴向和周向限位。
17.结合上述可能的实现方式,在第七种可能的实施方式中,旋合结构包括设置于圆周面的旋槽和定位销,旋槽用于对定位销进行导向并包括对定位销的周向和轴向进行限位的限位部分。
18.结合上述可能的实现方式,在第八种可能的实施方式中,旋槽设置于动力装置,定
位销设置于连接部。
19.结合上述可能的实现方式,在第九种可能的实施方式中,旋槽包括连通的旋进段和定位段,定位销沿旋进段进入定位段后使连接部和动力装置具有周向定位关系和轴向定位关系。
20.结合上述可能的实现方式,在第十种可能的实施方式中,连接部与动力装置间设置有定位模块,定位模块使连接部和动力装置之间形成预定作用力。
21.结合上述可能的实现方式,在第十一种可能的实施方式中,定位模块包括弹性件,弹性件被动力装置和工具组件挤压以产生预定作用力,预定作用力的方向为输出轴的轴向。
22.结合上述可能的实现方式,在第十二种可能的实施方式中,弹性件设置于工具组件中的手术工具与连接部之间,弹性件挤压手术工具以使手术工具与输出轴沿轴向压紧。
23.结合上述可能的实现方式,在第十三种可能的实施方式中,手术工具为髋臼磨锉杆组件或髓腔铰刀。
24.结合上述可能的实现方式,在第十四种可能的实施方式中,还包括示踪组件,示踪组件设置于动力装置表面。
25.结合上述可能的实现方式,在第十五种可能的实施方式中,动力装置连接至机械臂的末端段时形成末端段的延伸,输出轴横向于末端段。
26.结合上述可能的实现方式,在第十六种可能的实施方式中,所动力装置还包括假体安装执行器接口。
27.结合上述可能的实现方式,在第十七种可能的实施方式中,机器人连接端和假体安装执行器接口分布于动力装置的两端。
28.结合上述可能的实现方式,在第十八种可能的实施方式中,动力装置还包括把手,把手被配置为与连接手术工具的杆基本平行。
29.结合上述可能的实现方式,在第十九种可能的实施方式中,把手和手术工具分布在动力装置的两侧。
30.本公开的第二方面提出一种外科手术系统,包括执行器、机械臂、导航系统和控制系统,执行器为本公开第一方面的关节成型执行器;机械臂用于搭载执行器;导航系统用于测量执行器的位置;控制系统用于根据手术计划驱动机械臂将执行器移动至目标位置。
31.本公开提出的关节成型执行器包括动力装置和工具组件;动力装置包括机器人连接端和内设的动力组件,机器人连接端用于连接至机器人的机械臂末端,工具组件可拆卸地设置于动力装置,工具组件与动力装置连接时,手术工具在动力装置的驱动下转动运动。动力组件设置于壳体内部并通过输出轴输出动力,输出轴与工具组件的一端接合以驱动手术工具,无需使用长的导向筒对手术工具进行导向,使执行器结构更加紧凑。这样降低了外接动力源对手术空间的干涉影响以及安全性影响;减少了在手术中组装外接动力源的操作,使手术流程更加顺畅。
附图说明
32.图1为本公开实施例的手术系统示意图;
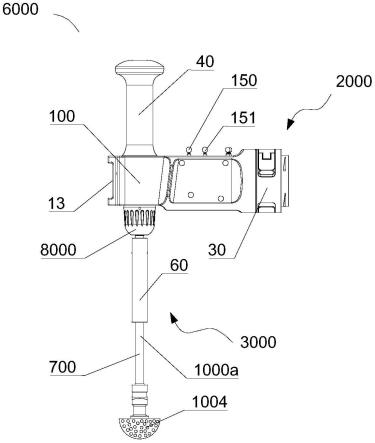
33.图2为本公开实施例的关节成型执行器结构示意图;
34.图3为本公开实施例的机器人连接端和第二接口连接假体安装执行器结构示意图;
35.图4为本公开实施例的动力装置结构示意图;
36.图5为本公开实施例的动力装置内部结构剖视图;
37.图6为本公开实施例的图3中动力装置中输出轴处结构示意图;
38.图7为本公开实施例的输出轴结构示意图;
39.图8为本公开实施例的联轴器结构示意图;
40.图9为本公开实施例的接头和输出轴结构示意图;
41.图10为本公开实施例的接头和输出轴结构的剖视图;
42.图11为本公开实施例的第一种工具组件示意图;
43.图12为本公开实施例的第一种工具组件的剖视图;
44.图13为本公开实施例的连接部结构示意图;
45.图14为本公开实施例的旋合结构以及花键连接示意图;
46.图15为本公开实施例的动力装置与第一种工具组件结构剖面示意图;
47.图16为本公开实施例的第一种工具组件与动力装置连接处结构示意图。
48.图17为本公开实施例的输出轴与转接轴另一种连接结构示意图;
49.图18为本公开实施例的输出轴与转接轴又一种连接结构示意图;
50.图19为本公开实施例的连接有第二种工具组件的关节成型执行器结构示意图;
51.附图标记:100-壳体,150-示踪组件,151-示踪元件,200-电机,300-减速器,400-输出轴,401-输入段,402-中段,403-输出段,4031-联轴花键,404-定位孔,500-联轴器,501-第一部分,502-第二部分,600-接头,601-孔,602-旋槽,6020-限位部分,6021-旋进段,6022-定位段,603-孔,610-旋合结构,700-接杆主轴,701-花键接头,702-接合孔,703-定位轴,710-花键连接,720-径向定位结构;800-接杆锁头,801-定位销,900-定位模块,901-卡托,902-弹性件,903-滑套,1000a、1000b-手术工具,1001-铰刀杆,1002-铰刀刃,30-机器人连接端,13-第二接口,40-手柄,50-绝缘罩,60-把持套,70-环槽,1004-髋臼锉,2000-动力装置,2100-动力组件,2200-动力源,3000-工具组件,4000-支撑组件,5000-调节组件,6000-关节成型执行器,7000-假体安装执行器,8000-连接部,9000-导航系统,9100-机械臂,9200-控制系统。
具体实施方式
52.下面将详细描述本公开的各个方面的特征和示例性实施例,为了使本公开的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本公开进行进一步详细描述。应理解,此处所描述的具体实施例仅意在解释本公开,而不是限定本公开。对于本领域技术人员来说,本公开可以在不需要这些具体细节中的一些细节的情况下实施。下面对实施例的描述仅仅是为了通过示出本公开的示例来提供对本公开的更好的理解。
53.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要
素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括
……”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
54.需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将结合附图对实施例进行详细描述。
55.髋关节置换手术涉及对髋臼窝的磨削和对股骨髓腔的扩髓。外科医生可以使用导航系统和机械臂系统辅助髋关节置换手术。如中国发明专利cn102612350b公开了一种用于髋关节置换手术的外科手术系统,该专利记载了导航系统和机械臂系统的基本构成和各自在手术中的具体作用和实现方式,本公开在此不再赘述。
56.如图1所示,本公开提出的机器人系统包括机械臂9100、导航系统9000、关节成型执行器6000和控制系统9200。机械臂9100相当于外科医生的手臂,可以把持手术工具并以较高的精度定位手术工具。导航系统9000相当于外科医生的眼睛,可以实时测量手术工具和患者组织的位置。控制系统9200相当于外科医生的大脑,内部储存手术规划。控制系统9200根据术中通过导航系统9000获取的信息计算机械臂的路线和/或应达的位置,可以主动控制机械臂9100运动,或者通过力反馈模式设置机械臂9100的虚拟边界后由人工推动机械臂9100沿虚拟边界限定的路线、面或体移动。
57.以关节成型执行器进行髋臼磨削为例进行说明,其中,手术工具1000a为髋臼磨锉杆组件。
58.关节成型执行器6000用于在髋关节上制备出的成型的髋臼窝或髓腔。关节成型执行器6000包括动力装置2000和工具组件3000。动力装置2000包括机器人连接端30和内设的动力组件2100。关节成型执行器6000通过机器人连接端30连接至机器人的机械臂9100末端,动力组件2100包括动力源2200和输出轴400,输出轴400与动力源2200连接。工具组件3000包括连接部8000和手术工具1000a,手术工具1000a可转动地设置于连接部8000。工具组件3000通过连接部8000可拆卸地设置于动力装置2000。工具组件3000通过连接部8000与动力装置连2000接时,手术工具1000a与输出轴400形成接合以接收输出轴400输出的转动运动。动力组件2100设置于动力装置2000内部并通过输出轴400输出动力。输出轴400与工具组件3000的一端接合以驱动髋臼磨锉杆组件,无需使用长的导向筒对接杆进行导向,使执行器结构更加紧凑。这样降低了外接动力源对手术空间的干涉影响以及安全性影响;减少了在手术中组装外接动力源的操作,使手术流程更加顺畅。
59.具体地,如图2、图4至图6所示,关节成型执行器6000包括动力装置2000和工具组件3000。动力装置2000包括壳体100和动力组件2100。壳体100是内部中空的零件,大致呈四棱柱状。壳体100的两端分别设置有机器人连接端30和第二接口13。机器人连接端30用于将关节成型执行器6000连接至机械臂9100。第二接口13作为假体安装执行器接口,用于可拆卸地连接假体安装执行器7000,以便在髋臼窝成型后通过假体安装执行器7000进行假体安装。壳体100上还设置有手柄40,手柄40内部中空,手柄40与壳体100为可拆卸连接。动力装置2000用于连接工具组件3000的结构为快装接口,设置在壳体100上与手柄40位置相对的另一侧。工具组件3000安装至快装接口时,手柄40与髋臼磨锉杆组件的轴线基本处于一条直线上,二者分布于动力装置2000的两侧。壳体100的各个表面用于连接示踪组件150以指示执行器的位置。
60.如图5所示,动力组件2100包括电机200、减速器300、输出轴400以及联轴器500。电机200和减速器300构成动力源2200,动力源2200集成于手柄40内部并与壳体100固定连接。减速器300的轴与输出轴400通过联轴器500连接。动力源2200和输出轴400均同轴设置,轴线垂直于壳体100。
61.如图7所示,输出轴400包括顺次设置的输入段401、中段402和输出段403。输入段401上设置有键槽4011,用于接收来自动力源2200的转动运动。中段402安装于动力装置2000中的轴承中。输出段403设置有联轴花键4031,联轴花键4031包括周向间隔分布的多个凸起,用于输出扭矩。联轴花键4031的长度小于输出段403的长度,即,输出段403的末段为一段光轴。
62.如图8所示,联轴器500为梅花联轴器。联轴器500包括第一部分501和第二部分502,第一部分501和第二部分502均设置有用于固定轴的锁紧螺钉,并且第一部分501和第二部分502间设置有绝缘套。减速器300输出端的轴通过联轴键和锁紧螺钉与第一部分501连接,输出轴400同样通过键连接和锁紧螺钉与第二部分502连接。联轴器500和减速器300输出端的轴以及输出轴400的键连接,一方面在锁紧螺钉的基础上增加了传动的可靠性,另一方面键连接提高了能够传递的最大扭矩。
63.参考图5和图6,在关节成型执行器6000内部,联轴器500的外围设置有绝缘罩50。绝缘罩50可以隔绝壳体100与减速器300,避免电机200的漏电通过减速器300传导至壳体100。绝缘罩50具有隔离电线/导线的作用,防止壳体100内部的电线/导线与转动的联轴器500摩擦或缠绕。
64.一并参考图5至图7、图9至图10,壳体100上还设置有接头600,接头600与壳体100固定。
65.接头600用于连接工具组件3000以及安装输出轴400。接头600主体呈柱状,内开设有孔601,外周设置有四个旋槽602,旋槽602用于对销轴件进行导向并包括对销轴件的周向和轴向进行限位的限位部分6020,接头600一端沿径向设置有两个翼板。孔601内用于安装轴承并接纳输出轴400的中段402。旋槽602包括旋进段6021和定位段6022,旋进段6021在第一轴向上螺旋延伸,定位段6022在旋进段6021延伸的末端朝第二轴向延伸,其中第一轴向和第二轴向方向相反。定位段6022的侧壁即形成限位部分6020定位段6022的侧壁用于对槽中的容纳物形成第二轴向的限位和沿周向的限位。翼板用于将接头600与壳体100固定。输出轴400安装于接头600时,联轴花键4031伸出孔601并位于壳体100之外。
66.如图11至图13所示,工具组件3000包括连接部8000和手术工具1000a。手术工具1000a通过其一端可转动地设置于连接部8000。手术工具1000a为髋臼磨锉杆组件,另一端连接髋臼锉。髋臼磨锉杆组件包括接杆主轴700、臼锉连接部件和把持套60。接杆主轴700的一端与连接部8000可转动连接,另一端设置臼锉连接部件。把持套60套合在接杆主轴700外。接杆主轴700与连接部8000连接的一端设置有花键接头701和接合孔702。花键接头701与联轴花键4031能够嵌合匹配,以实现转动运动的传递。但二者并不是紧配合,在轴向上可以分离。接合孔702的直径与输出段403上的光轴部分的直径相同。
67.连接部8000包括接杆锁头800和接杆连接模块。接杆锁头800为内部中空的杯状,底部设置有圆孔。接杆锁头800内圆周面靠近开口的位置设置有四个沿周向分布的定位销801。接杆连接模块设置于接杆锁头800的内部,用于将髋臼磨锉杆组件可转动地连接至接
杆锁头800。
68.接杆连接模块包括卡托901、定位模块900和一对滑套903,均同轴地保持在接杆锁头800内。卡托901为环状,设置于最外侧(接杆锁头800的开口侧)。定位模块900包括弹性件902,用于使连接部8000和动力装置2000之间形成预定作用力,在本实施例中弹性件902为推力弹簧。两个滑套903均为环状,在轴向上位于卡托901与接杆锁头800的底部之间。滑套903的外圆周面与接杆锁头800内圆周面配合,内孔与接杆主轴700等径。推力弹簧设置于两个滑套903之间。
69.接杆主轴700套设在卡托901、推力弹簧和滑套903内。接杆主轴700外周面还设置有两个具有预定间距的环槽70,环槽70用于安装挡环。装配关系下,卡托901、推力弹簧、滑套903和接杆锁头800均位于两个挡环之间,因此接杆锁头800与接杆主轴700形成一个整体。推力弹簧可压缩,因此接杆锁头800沿接杆主轴的轴向有一定的活动量。
70.如图14所示,连接部与动力装置2000将通过旋合结构610连接以形成对连接部的轴向和周向限位,其中旋合结构610由定位销801和旋槽602构成,即工具组件3000通过定位销801与旋槽602旋合配合连接至壳体100。
71.如图15和图16所示为髋臼磨锉杆组件安装至动力装置2000的结构示意图。装配关系下,定位销801插接在旋槽602的定位段6022中。定位段6022的沿轴向延伸的两个侧壁对定位销801形成周向限位、端壁对定位销801形成沿轴向的限位。因此不受外力情况下接杆锁头800不会沿轴向掉落,也不会沿周向旋转。连接部8000与接杆主轴700和壳体100之间均形成径向定位,相当于接杆主轴700与输出轴400(其定位在壳体100上)之间形成径向定位。具体参考图14和图16,输出轴400的光轴部分与接杆主轴700的接合孔702形成径向定位结构710,径向定位结构710为等径的轴孔配合结构,即输出轴400与接合孔702之间形成直接的径向定位。受限于形成连接部8000与接杆主轴700之间径向定位的配合段的长度和配合精度,接杆主轴700可能会存在一定的径向活动量。而输出轴400的光轴部分与接杆主轴700的接合孔702之间的径向定位,能够提高径向定位精度。
72.接杆主轴700的花键接头701与输出轴400的联轴花键4031对准并接合以接收转动运动。推力弹簧对接杆锁头800轴向的作用力使定位销801被沿轴向压紧在定位段6022的端壁上。由于推力弹簧被压缩,连接部8000与动力装置2000之间的连接存在内应力,该内应力使得工具组件3000与动力之间形成稳定的轴向定位,并且不会增加为保证轴向定位精度的设计难度或安装难度,连接更稳固,不易因振动等原因发生松动。并且,在轴向上接杆主轴700被推力弹簧推动抵靠在输出轴400上形成轴向定位。
73.相对于螺纹旋合连接,定位销801与旋槽602的配合更省力,便于术中快速拆装;定位段6022对定位销801的直接的物理限位相对于摩擦锁紧也更可靠。在一些可选的实施方式中,定位销801可设置于接杆锁头800的外圆周面,旋槽602设置于接头600的内圆周面。在另一些可选实施例中,定位销801可以设置于接头600的内/外圆周面上,旋槽602可以设置于接杆锁头800的外/内圆周面上,通过这样的设置同样保证定位销801与旋槽602配合时能够旋合,并进一步实现接头600和接杆锁头800的轴向和周向定位。
74.输出轴400与接杆主轴700之间的接合为花键连接710,花键连接710在接合过程中只需接杆主轴700在轴向上对准输出轴400即可,操作便利。在一些可选实施例中,输出轴400与接杆主轴700之间还可以通过端面的相互嵌合形成可传递扭矩的连接。
75.如图17所示,在一些可选实施例中,可以以其他径向定位结构替代输出轴400的光轴部分与接杆主轴700的接合孔702间的径向定位。如,在接杆主轴700的端部设置定位轴703,在输出轴400上设置定位孔404,二者的轴孔配合形成径向定位。或者,如图18所示,在接头600和接杆主轴700之间设置轴孔配合结构,如,在接头600端部设置直径大于输出轴400的花键部分直径的孔603,对应的接杆主轴700的末端设置为相等直径,二者之间形成轴孔配合。
76.在一些可选实施例中,还可以在其他位置设置作为定位模块900中弹性件902的弹簧以形成工具组件3000与动力装置2000之间的内应力。如,在动力装置2000上固定压簧。工具组件3000安装至动力装置2000时,接杆锁头800压缩压簧,压簧的反作用力将接杆锁头800的定位销801压紧在旋槽602中,使接杆锁头800与动力装置2000之间保持预压力,形成较稳固的连接。在最终使用状态下,接杆主轴700会受到患者组织反作用力而在轴向上与输出轴压紧。压簧可采用普通螺旋弹簧、碟簧、波纹弹簧等,当然弹性件902也不限于弹簧的形式,也可以是具有弹性的弹片。
77.下面对髋关节成型器的使用过程进行具体说明。
78.在使用时,关节成型执行器6000通过机器人连接端30与机械臂9100连接,此时关节成型执行器6000未安装工具组件3000。首先,机械臂9100按照预定的手术计划进入准备位置。医生将搭载有髋臼锉1004的髋臼磨锉杆组件通过接头600安装至关节成型执行器6000。具体为,医生手持接杆锁头800将接杆主轴700的接合孔沿轴向套设于输出轴400的输出段403,并使联轴花键4031与花键接头701对准接合。完成输出轴400和接杆主轴700的周向接合后,接杆主轴700与输出轴400抵接,医生向靠近执行器的方向提拉和转动接杆锁头800,使接杆锁头800的定位销801在旋槽602内沿旋进段6021最终进入定位段6022。
79.这样,联轴花键4031与花键接头701的接合实现了输出轴400和接杆主轴700的周向接合,输出段403和接合孔702的配合则提高了连接的同轴度,也与接杆锁头800一起增长了对接杆主轴700的径向定位长度,提高输出轴400和接杆主轴700传递转动时的同轴度。定位销801位于定位段6022内时,定位销801受限于定位段6022的两个沿轴向延伸的侧壁不能相对于接头600周向转动。推力弹簧使接杆锁头800相对于接头600具有朝向接杆主轴700运动的趋势,该运动趋势阻止定位销801沿轴向脱出定位段6022到达旋进段6021。推力弹簧使接杆主轴700沿轴向抵靠在输出轴400,即推力弹簧推动接杆主轴700与输出轴400保持轴向接合。上述操作过程,接杆主轴700被径向定位的部分为顶端,沿轴向移动髋臼磨锉杆组件的行程较小,所需操作空间也相应较小。
80.至此,髋臼磨锉杆组件与壳体100完成连接,在预定手术计划的指导下,关节成型执行器6000在机械臂9100及医生的控制下运动至预定目标位置。启动电机200,电机200的转动依次经过减速器300、联轴器500传递至输出轴400。由于输出轴400和接杆主轴700通过联轴花键4031和花键接头701连接,接杆主轴700在输出轴400的带动下产生转动,转动过程中由于接杆锁头800与接头600固定连接,接杆锁头800不会产生转动。转动的接杆主轴700带动髋臼锉1004转动以进行髋臼窝的磨削和成型。
81.按照预定的手术计划完成髋臼窝的磨削成型后,机械臂9100进入可以拆卸髋臼磨锉杆组件的位姿,医生克服推力弹簧的弹力提拉接杆锁头800,定位销801脱出定位段6022的限制,旋转接杆锁头800,定位销801经由旋进段6021后脱离旋槽602,接杆锁头800与接头
600脱离。沿接杆主轴700的轴向使髋臼磨锉杆组件远离接头600即完成拆卸。
82.综上所述,电机200、减速器300、联轴器以及输出轴400集成在壳体100内部,电机200的电源线可以通过壳体100与机械臂9100之间的接口引入。关节成型执行器6000结构紧凑,不用设置外接动力源,也避免了外接动力源及其电源线对手术空间的干涉影响以及电源线外露的安全隐患。无须在手术中组装外接动力源也减少了手术的操作步骤。工具组件3000由连接部8000和髋臼磨锉杆组件组成,作为预装的模块化零件,能够方便地实现手术工具1000a与输出轴400的可拆卸连接。
83.如图19所示,在一种可选的实施方式中,手术工具1000b为髓腔铰刀,工具组件3000包括连接部8000以及髓腔铰刀。其中,髓腔铰刀包括铰刀杆1001和与铰刀杆1001连接的用于扩髓的铰刀,铰刀杆1001端部设置有花键接头701,用于与联轴花键4031连接;铰刀上开设置有铰刀刃1002,用于在旋转运动下对股骨髓腔进行扩髓。连接部8000与上述连接髋臼磨锉杆组件的连接部8000结构相同,接杆连接模块将铰刀杆1001与接杆锁头800连接。并且,连接有髓腔铰刀的工具组件3000与接头600以及输出轴400的连接与上述同理,接杆锁头800与接头600连接后,髓腔铰刀通过花键接头701与联轴花键4031接合至输出轴400,输出轴400在电机200的驱动下带动髓腔铰刀旋转并执行股骨近端的扩髓任务。
84.在一种可选的实施方式中,第一执行器6000设置有三组示踪组件150。三组示踪组件150分别设置在壳体100的三个面上,每组中包含四个位于同一平面的示踪元件151。如图2至图4所示,壳体100上设置有三个平面,三组示踪元件151分别设置在三个平面上。其中,示踪元件151可以是无源的反光球或反光片,也可以是有源的电磁发生器或传感器。
85.可以理解的是,髋关节成型手术中,示踪器件150向定位器发送关节成型执行器6000的位置信息,而定位器在手术空间中通常固定设置定位器为导航系统9000中接收位置信息的装置,通过三组示踪元件151的设置,使得关节成型执行器6000在多种位姿下均能够被定位器识别到位置信息。与示踪元件151对应的,定位器可以是识别反射光的光学导航仪,也可以是识别电磁信号的接收器。
86.继续参考图1,本公开的第二方面提出一种外科手术系统,用于执行髋关节成型手术。包括执行器、机械臂9100、导航系统9000和控制系统9200,执行器为本公开第一方面的关节成型执行器6000;机械臂9100用于搭载关节成型执行器6000并控制执行器的方位。机械臂9100既可以完全主动地控制执行器的方位,也可以以协作的方式限制执行器的部分活动自由度或活动范围。具体地,经控制系统9200编程可以控制机械臂9100,使机械臂9100完全自主地按照手术计划移动,或通过提供触觉反馈或力反馈以限制外科医生手动移动手术工具1000a或1000b超出预定虚拟边界,或提供虚拟导向以引导外科医生沿某个自由度移动。虚拟边界和虚拟导向可以来自于手术计划,也可以在术中通过输入装置设置。执行器与机械臂9100之间为可拆卸连接;导航系统9000用于测量关节成型执行器6000和患者的位置。导航系统9000一般包括定位器和示踪器。示踪器安装在执行器、手术工具和患者身体上。示踪器一般为由多个示踪元件组成的阵列,每个示踪元件可以以主动或被动的方式发出光学或电磁等信号。定位器(如双目相机)通过3d测量技术测量上述示踪器的方位。控制系统9200用于根据手术计划驱动机械臂9100将关节成型执行器移动至目标位置。手术计划中可以包括机械臂移动路径、移动边界等。
87.具体的,在手术系统中,未安装工具组件3000的关节成型执行器通过机器人连接
端30连接至机械臂9100后,机械臂9100在控制系统9200的控制下按照预定的手术计划进入准备位置,在准备位置下,医生将工具组件3000安装至动力装置2000。接着执行器根据预定的手术计划运动。内置动力源,即电机200和减速器300,手术工具1000a或1000b在电机200和减速器300的驱动下进行旋转,并且,控制系统控制机械臂9100对手术工具1000a或1000b的运动空间进行限制。医生通过壳体100上的手柄40推动关节成型执行器使6000手术工具1000a或1000b在允许的运动空间内进给。在临床手术中,以通常的手术顺序来说,会首先进行髋臼窝的磨削,再进行股骨近端的扩髓。在进行两种手术时可以通过更换预装的工具组件3000来实现手术工具的方便更换,其中,第一组工具组件3000中安装的手术工具1000a为髋臼磨锉杆组件,第二组工具组件3000中安装的手术工具1000b为髓腔铰刀。工具组件3000的安装原理及过程在上述实施方式中已具体体现,这里不在赘述。
88.虽然,上文中已经用一般性说明及具体实施方案对本公开作了详尽的描述,但在本发申请基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本公开精神的基础上所做的这些修改或改进,均属于本公开要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1