一种上肢康复训练机器人的制作方法
本技术涉及康复医疗设备,具体涉及一种上肢康复训练机器人。
背景技术:
1、随着社会老龄化的发展,老年人由于中风等导致偏瘫的现象越来越多,针对治疗后的康复设备也越来越多,现有上肢康复训练装置大致可以分为两类,一类是基于关节模组传动的康复装置,另一类是采用绳驱单元传动的康复装置。
2、基于关节模组传动的康复装置存在以下缺点:
3、1、关节模组的安装方式会导致机器人自身惯量较大,动态性能较差
4、2、关节模组为了提供足够的输出力矩,通常采用较大的传动比,不借助力传感等设备,难以实现逆向可驱,即使采用力传感设备,由于其存在齿隙、齿面摩擦、润滑脂阻力等多种非线性摩擦阻力,其逆向可驱性能较差;
5、3、减速机采用齿轮传动,通常其噪声较大。
6、采用绳驱单元传动的康复装置在自身惯量分布、逆向可驱性能及产品噪音方面存在明显优势,如中国专利cn108472191 a提出了一种三自由度的绳驱传动康复设备,但是该专利只有三个自由度,只能实现肘关节及肩关节的部分活动范围的康复训练,无法实现肘关节及腕关节的旋前、旋后康复训练,以及腕关节及手指的康复训练。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种上肢康复训练机器人。
2、本实用新型采用的技术方案是:
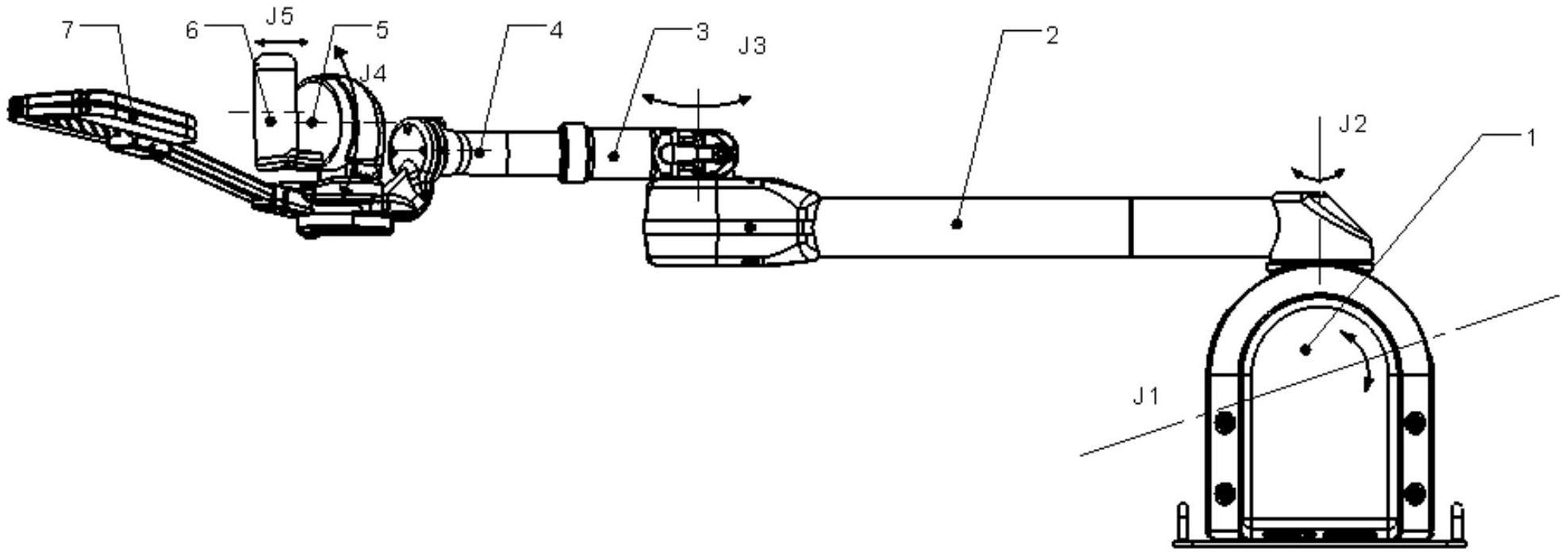
3、一种上肢康复训练机器人,包括底座部件、大臂部件、肘部部件、小臂部件、腕部部件、手柄部件及手托部件。
4、底座部件包括能够输出第一主动自由度和第二主动自由度的绳索差速器及j3轴电机。
5、大臂部件包括大臂本体及设于大臂本体内的大臂钢丝绳。
6、肘部部件包括肘部关节和小臂连接件,所述肘部关节包括肘部输入滑轮、肘部输出滑轮及肘部钢丝绳;j3轴电机通过大臂钢丝绳驱动肘部输入滑轮转动,肘部输入滑轮通过肘部钢丝绳带动肘部输出滑轮绕j3轴转动,输出第三主动自由度。
7、小臂连接件一端与肘部输出滑轮固定连接连接,另一端同轴固定连接小臂部件;所述小臂部件的另一端固定连接腕部部件。
8、腕部部件包括腕部固定架及安装在腕部固定架上的j4轴电机及行星减速机,手柄部件与行星减速机的行星架固定连接;所述j4轴电机驱动所述行星减速机转动,进而带动手柄部件绕j4轴转动,输出第四主动自由度;所述手柄部件设有第一被动自由度,所述第一被动自由度为手指沿j5轴抓握自由度。
9、手托部件包括用于在康复训练时承托患者小臂的手托板,所述手托板一端与腕部固定架固定连接。
10、进一步地,所述绳索差速器包括两个驱动电机、两个输入滑轮、两组输入钢丝绳、一个输出滑轮及两组输出钢丝绳;两个驱动电机分别通过两组输入钢丝绳驱动两个输入滑轮转动,两个输入滑轮通过两组输出钢丝绳与输出滑轮连接,两个输入滑轮同向转动实现所述大臂部件绕j1轴转动,两个输入滑轮反向转动实现所述大臂部件绕j2轴转动。
11、进一步地,所述手柄部件包括手柄支撑体、导向柱、螺旋弹簧、压力传感器、手柄前罩壳及手柄后罩壳;手柄前罩壳和手柄后罩壳通过套装螺旋弹簧的导向柱滑动连接,螺旋弹簧两端分别抵靠在手柄前罩壳和手柄后罩壳的内侧壁;通过压缩螺旋弹簧实现手指沿j5轴的开合运动,实现第一被动自由度的输出;所述压力传感器用于检测手指施加在手柄部件上的压力值的大小。
12、进一步地,小臂部件包括小臂本体,小臂本体通过小臂快换结构与小臂连接件连接;小臂快换结构包括内螺纹套筒及定位套,定位套固定套装在小臂本体的后端,内螺纹套筒套装在定位套上且螺纹连接小臂连接件。
13、进一步地,小臂本体在水平面内向一侧弯曲,小臂连接件通过左右换侧结构与肘部关节连接;所述左右换侧结构包括:手轴、偏心把手、长螺钉、压块、u形肘部支架及固定套;固定套固定在肘部输出滑轮的顶面,u形肘部支架闭口端与小臂连接件固定连接,开口端延伸至固定套两侧的两个开口,手轴沿z轴方向设置在肘部输出滑轮的一端,偏心把手可转动地套装在手轴上,长螺钉轴向穿过固定套、u形肘部支架及压块,螺纹连接手轴;偏心把手用于通过压块将u形肘部支架压紧在固定套上,或者放松u形肘部支架使其绕长螺钉翻转。
14、进一步地,腕部部件通过手托翻转机构与小臂本体连接;所述手托翻转机构包括小臂定位套、防转销、压缩螺旋弹簧、手托架、轴承支撑件、轴承外圈固定环、轴承、及锁紧螺母;手托架一端与腕部固定架固定连接,另一端与轴承支撑件固定连接;轴承支撑件通过轴承与小臂定位套可转动连接,小臂定位套固定套装在小臂本体上,轴承外圈固定环与小臂定位套螺纹连接用于压紧轴承的外圈,锁紧螺母与轴承支撑件螺纹连接用于压紧轴承的内圈,套装有压缩螺旋弹簧的防转销轴向可滑动地穿过小臂定位套插装在手托架的一个销孔b内,销孔b设有两个且沿小臂本体轴线对称分布。
15、进一步地,手托部件还包括缓冲垫和板簧,缓冲垫粘结在手托板的上侧面,板簧的一端固定连接手托板,另一端固定连接腕部固定架。
16、本实用新型的有益效果:
17、1、本实用新型的j1、j2、j3轴运动采用绳驱单元传动,可实现机器人的逆向可驱功能,从而实现患者带动机器人的主动运动,且绳驱单元传动无间隙,运动时噪音小,使用时舒适度高;j4轴运动利用小减速比的行星减速机构,行星减速机构的结构紧凑,从而使机器人的运动更灵活,患者进行康复训练时与机器人的干涉更小;j5轴采用弹簧加导向柱实现手指的开合运动,可实现患者手指的康复训练。总之,本实用新型可实现由患者带动机器人或由机器人带动患者的主动运动和被动运动,从而实现患者腕部带动肘部绕j4轴旋前、旋后的康复运动训练,肘部及肩部绕j3轴、j2轴及j1轴上下、左右摆动的康复运动训练,运动范围大,自由度高,康复效果好。
18、2、本实用新型的机器人可与控制系统连接,由上位机软件运行的游戏,通过交互的方式以任务的形式引导患者进行主动、抗阻、助力、被动模式的康复训练,上位机通过实时同步机器人末端位置,并以光标的形式显示在游戏场景中,实现患者与游戏任务的交互。在进行主动、抗阻、助力、被动模式的康复训练过程中,患者通过按下手持的疼痛开关标注疼痛点,同时控制系统依据标注的疼痛点,生成虚拟安全球区域,防止患者运动到疼痛位置,避免运动损伤的发生;在进行主动、抗阻、助力、被动模式的康复训练过程中,上位机可根据患者连续完成任务的次数,自动增加或缩小训练范围,智能的调节患者训练的难度,而无需人工干预,防止患者因完成任务过于困难或简单而感到无聊,甚至于产生抵触情绪。另外,通过自动调节难度,可以使患者不断挑战自己当前的运动能力,以达到更好的康复训练效果。
技术特征:
1.一种上肢康复训练机器人,其特征在于,包括底座部件(1)、大臂部件(2)、肘部部件(3)、小臂部件(4)、腕部部件(5)、手柄部件(6)及手托部件(7);
2.根据权利要求1所述的一种上肢康复训练机器人,其特征在于,所述手柄部件(6)包括手柄支撑体、导向柱(601)、螺旋弹簧(602)、压力传感器(603)、手柄前罩壳(604)及手柄后罩壳(605);手柄前罩壳(604)和手柄后罩壳(605)通过套装螺旋弹簧(602)的导向柱(601)滑动连接,螺旋弹簧(602)两端分别抵靠在手柄前罩壳(604)和手柄后罩壳(605)的内侧壁;通过压缩所述螺旋弹簧(602)实现手指沿j5轴的开合运动,实现第一被动自由度的输出;所述压力传感器(603)用于检测手指施加在手柄部件(6)上的压力值的大小。
3.根据权利要求1所述的一种上肢康复训练机器人,其特征在于,小臂部件(4)包括小臂本体(401),小臂本体(401)通过小臂快换结构与小臂连接件(305)连接;小臂快换结构包括内螺纹套筒(402)及定位套(403),定位套(403)固定套装在小臂本体(401)的后端,内螺纹套筒(402)套装在定位套(403)上且螺纹连接小臂连接件(305)。
4.根据权利要求1所述的一种上肢康复训练机器人,其特征在于,小臂本体(401)在水平面内向一侧弯曲,小臂连接件(305)通过左右换侧结构与肘部关节连接;所述左右换侧结构包括:手轴(307)、偏心把手(306)、长螺钉(308)、压块(309)、u形肘部支架(310)及固定套(311);固定套(311)固定在肘部输出滑轮(304)的顶面,u形肘部支架(310)闭口端与小臂连接件(305)固定连接,开口端延伸至固定套(311)两侧的两个开口,手轴(307)沿z轴方向设置在肘部输出滑轮(304)的一端,偏心把手(306)可转动地套装在手轴(307)上,长螺钉(308)轴向穿过固定套(311)、u形肘部支架(310)及压块(309),螺纹连接手轴(307);偏心把手(306)用于通过压块(309)将u形肘部支架(310)压紧在固定套(311)上,或者放松u形肘部支架(310)使其绕长螺钉(308)翻转。
5.根据权利要求1所述的一种上肢康复训练机器人,其特征在于,腕部部件(5)通过手托翻转机构与小臂本体(401)连接;所述手托翻转机构包括小臂定位套(420)、防转销(513)、压缩螺旋弹簧(514)、手托架(515)、轴承支撑件(516)、轴承外圈固定环(517)、轴承(518)、及锁紧螺母(519);手托架(515)一端与腕部固定架(505)固定连接,另一端与轴承支撑件(516)固定连接;轴承支撑件(516)通过轴承(518)与小臂定位套(420)可转动连接,小臂定位套(420)固定套装在小臂本体(401)上,轴承外圈固定环(517)与小臂定位套(420)螺纹连接用于压紧轴承(518)的外圈,锁紧螺母(519)与轴承支撑件(516)螺纹连接用于压紧轴承(518)的内圈,套装有压缩螺旋弹簧(514)的防转销(513)轴向可滑动地穿过小臂定位套(420)插装在手托架(515)的一个销孔b内,销孔b设有两个且沿小臂本体(401)轴线对称分布。
6.根据权利要求1所述的一种上肢康复训练机器人,其特征在于,手托部件(7)还包括缓冲垫(703)和板簧(701),缓冲垫(703)粘结在手托板(702)的上侧面,板簧(701)的一端固定连接手托板(702),另一端固定连接腕部固定架(505)。
技术总结
本技术公开了一种上肢康复训练机器人,上肢康复训练机器人包括底座部件、大臂部件、肘部部件、小臂部件、腕部部件、手柄部件及手托部件;本技术的机器人具有逆向可驱功能,且具有四个主动自由度和一个被动自由度,可实现患者带动机器人或由机器人带动患者的主动康复训练运动或被动康复训练运动,从而实现患者腕部带动肘部绕J4轴的旋前、旋后康复运动训练,肘部及肩部绕J3轴、J2轴及J1轴的上下、左右摆动康复运动训练,以及手指沿J5轴的开合康复运动训练。本技术的机器人运动范围大,噪音小,使用时舒适度高,康复效果好。
技术研发人员:李子健,吴俣,付杰,臧家炜,袁浩强
受保护的技术使用者:埃斯顿(南京)医疗科技有限公司
技术研发日:20220805
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!