一种主从式遥操作骨科机器人系统的制作方法
本技术涉及一种骨科机器人系统,尤其是一种主从式遥操作骨科机器人系统。
背景技术:
1、在骨科手术中,手术控制的精准度和稳定性十分重要,手术成功的关键在于能否准确按照手术预设计划进行定位操作并且不损害人体神经组织,达到手术治疗目的。目前的骨科手术主要是由医生使用现有的骨科电磨或者超声骨刀,由徒手进行操作,一旦磨削的量或者超声骨刀的切入量控制不好,容易造成神经受损。
2、现有的骨科手术机器人一般分为两种:骨科手术纯定位机器人和骨科手术定位加纠错机器人。骨科手术纯定位机器人用在脊柱外科手术中,它只告诉医生植入脊柱钛钉的方向,具体钛钉植入的所有动作都由医生自己完成;骨科手术定位加纠错机器人用在关节置换手术中,它告诉医生切割患者膝关节和髋关节的方向,具体的切割动作还是由医生自己完成,如果医生在切割时,超出了术前计划的范围,机器人及时纠偏。也有部分骨科手术机器人的机械臂工具端安装工具,术中采用随动的方式,配合双目视觉导航系统,依然需要医生手握工具进行操作,虽然增加了工具在空间的稳定性,但是需要医生实时进行控制,这个过程中医生还需要不停观察一旁的ct图像或其它带有导航定位的辅助影像,用以辅助手术操作,判断当前的操作是否合适或到位。
3、对于主从遥控式手术机器人产品,目前仅用在普通的外科手术当中,还没有主从遥控式骨科手术机器人产品。
4、现有技术存在的问题:(1)普通随动式导航骨科手术过程中,依然需要医生手握工具进行操作,虽然增加了工具在空间的稳定性,但是需要医生实时进行控制,这个过程中医生还需要不停观察一旁的ct图像或其它带有导航定位的辅助影像,用以辅助手术操作,判断当前的操作是否合适或到位。这个过程需要医生的视觉在一侧的显示屏和手术部位之间不停切换,很容易造成医生分神,影响手术效果和效率;(2)随动操作的精度受限于人手的精度,存在精度低且人手存在难以控制的抖动的问题。
5、因此,需要提供一种操作方便精准、效率高、精度高、可主从甚至远程操作的且能降低手术伤害的机器人手术系统,来避免上述问题。
技术实现思路
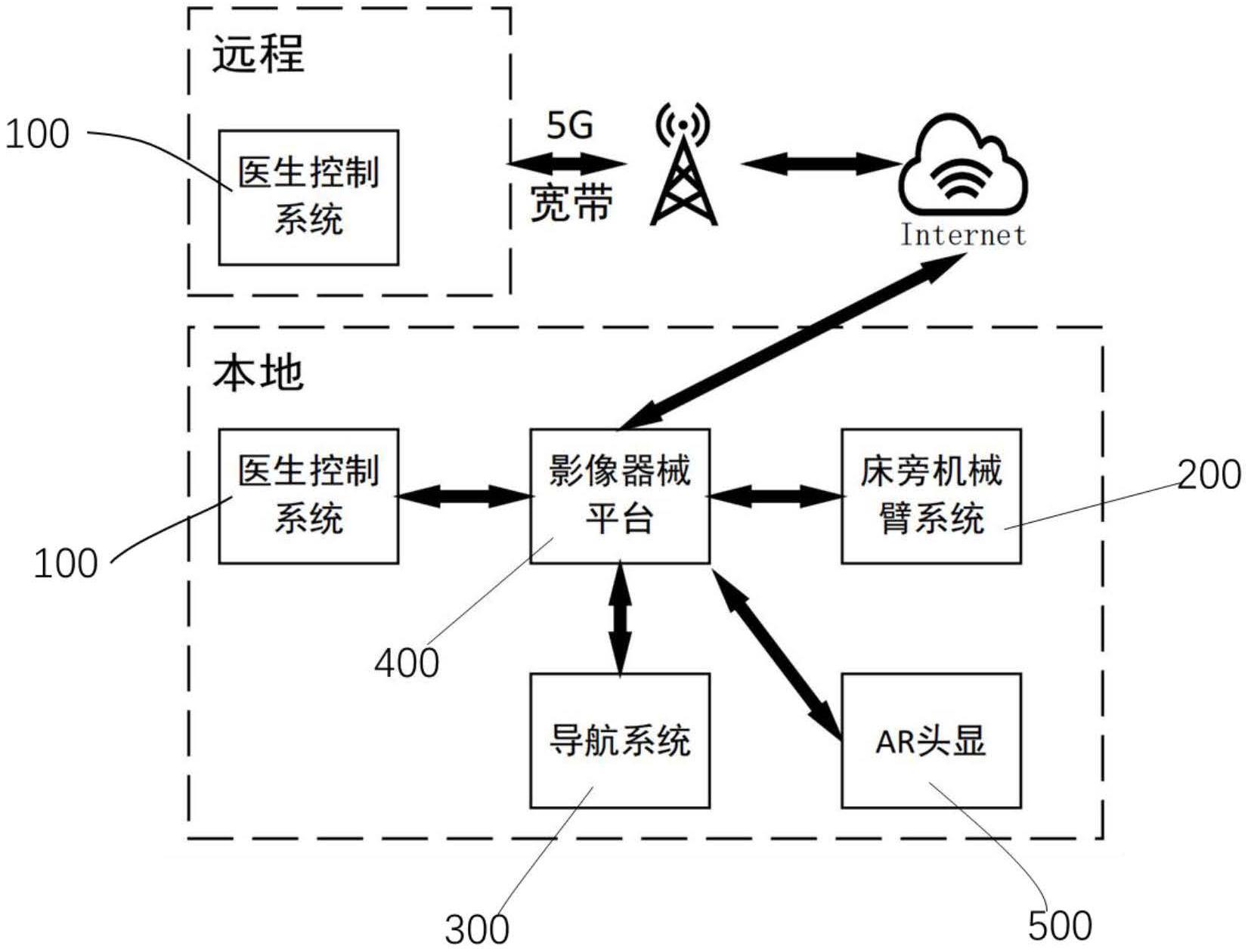
1、本实用新型提供一种主从式遥操作骨科机器人系统,包括医生控制系统,床旁机械臂系统,导航系统,影像器械平台,医生操作所述医生控制系统,所述医生控制系统控制所述床旁机械臂系统进行手术;所述医生控制系统为本地控制系统或远程控制系统。
2、优选地,所述医生控制系统包括两只遥操作主手、若干脚踏开关、显示装置;其中遥操作主手包括多个转动或摆动关节,每个转动或摆动关节包括编码器和关节驱动模组,编码器将关节运动信号同步传递给床旁机械臂系统,床旁机械臂系统包括多自由度的机械臂,所述床旁机械臂系统接收关节运动信号,驱动所述机械臂进行手术。
3、优选地,所述显示装置包括第一显示屏和第二显示屏,所述第一显示屏和第二显示屏显示偏振图像,医生通过偏振光眼镜查看3d效果的影像;所述第一显示屏显示实时手术影像,所述第二显示屏显示实时虚拟手术工具、手术部位骨骼的ct或核磁共振影像、手术部位的器官组织影像中的一种或多种。
4、优选地,所述床旁机械臂系统包括病床,一个或多个机器人台车;机器人台车上安装有多自由度机械臂、标定靶a;机械臂的末端设有机械臂卡口,机械臂卡口上带有标定靶b,所述机械臂卡口用于安装各种手术器械或摄像头;在手术时,骨骼上还设置标定靶c,上述标定靶上分别设有多个小球,所述导航系统根据上述标定靶进行定位和导航。
5、优选地,所述导航系统包括导航模组和导航支架车,所述导航模组是基于双目视觉测距原理的用于手术导航和定位的装置。
6、优选地,所述影像器械平台包括多个显示屏,影像处理模块,器械中控模块。
7、优选地,所述系统还包括ar头显装置,所述ar头显装置用于显示手术部位的三维虚拟影像,并将虚拟影像和人眼看到的真实场景对应叠加。
8、本实用新型具有以下技术效果:(1)医生通过屏幕观察手术影像并通过遥操作主手来控制手术机械臂的运动,避免了医生视觉在手术部位和多块屏幕之间切换造成分神的影响,安全性更好,效果更高;(2)在骨科手术中采用主从操作方式,可按比例缩放人的操作,提高手术操作精度;此外通过抖动滤波算法来把人操作的抖动滤除,增强手术安全性;(3)遥操作主手可通过5g或宽带接入网络,实现床旁机械臂系统的远程控制,医生可在几千公里之外对偏远地区进行手术,让优质医疗资源更为容易获得。
技术特征:
1.一种主从式遥操作骨科机器人系统,包括医生控制系统(100),床旁机械臂系统(200),导航系统(300),影像器械平台(400),其特征在于,医生操作所述医生控制系统(100),所述医生控制系统(100)控制所述床旁机械臂系统(200)进行手术;所述医生控制系统(100)为本地控制系统或远程控制系统;
2.根据权利要求1所述的系统,其特征在于,所述医生控制系统(100)包括两只遥操作主手(101)、若干脚踏开关(102)、显示装置;其中遥操作主手(101)包括多个转动或摆动关节,每个转动或摆动关节包括编码器和关节驱动模组,编码器将关节运动信号同步传递给床旁机械臂系统(200),床旁机械臂系统(200)包括多自由度的机械臂(211),所述床旁机械臂系统(200)接收关节运动信号,驱动所述机械臂(211)进行手术。
3.根据权利要求2所述的系统,其特征在于,所述显示装置包括第一显示屏(103)和第二显示屏(104),所述第一显示屏和第二显示屏显示偏振图像,医生通过偏振光眼镜查看3d效果的影像;所述第一显示屏显示实时手术影像,所述第二显示屏显示实时虚拟手术工具、手术部位骨骼的ct或核磁共振影像、手术部位的器官组织影像中的一种或多种。
4.根据权利要求3所述的系统,其特征在于,所述导航系统(300)包括导航模组(301)和导航支架车(302),所述导航模组是基于双目视觉测距原理的用于手术导航和定位的装置。
5.根据权利要求4所述的系统,其特征在于,所述影像器械平台(400)包括多个显示屏(401,402),影像处理模块(403),若干器械中控模块(404)。
6.根据权利要求3所述的系统,其特征在于,所述系统还包括ar头显装置(500),所述ar头显装置用于显示手术部位的三维虚拟影像,并将虚拟影像和人眼看到的真实场景对应叠加。
技术总结
本技术一种主从式遥操作骨科机器人系统,包括医生控制系统(100),床旁机械臂系统(200),导航系统(300),影像器械平台(400),医生操作所述医生控制系统(100),所述医生控制系统(100)控制所述床旁机械臂系统(100)进行手术;所述医生控制系统(100)为本地控制系统或远程控制系统。
技术研发人员:史文勇,何达,高恒瑞,刘学锋,王玉渊
受保护的技术使用者:科弛医疗科技(北京)有限公司
技术研发日:20221031
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!