一种徒手牵引装置
本技术涉及医疗用具,具体为一种徒手牵引装置。
背景技术:
1、牵引疗法是应用外力对身体某一部位或关节施加牵拉力,使其发生一定的分离,周围软组织得到适当的牵伸,从而达到治疗目的的一种方法。脊椎牵引疗法根据使用外力牵拉的部位不同,分为脊柱牵引和四肢关节牵引。
2、目前的牵引操作(如腿部)一般需要两个以上的医护人员进行配合,有医护人员负责将病人的肢体抬起,还有医护人员负责固定绑带,另有医护人员加之细致的手法操作以辅助病人恢复,但是由于医院的病人较多,所以整个牵引工作较为繁重,也降低了医护人员的工作效率,为此我们提出一种可单人操作的牵引装置。
技术实现思路
1、本实用新型的目的在于提供一种徒手牵引装置,以解决上述背景技术中提出的问题。
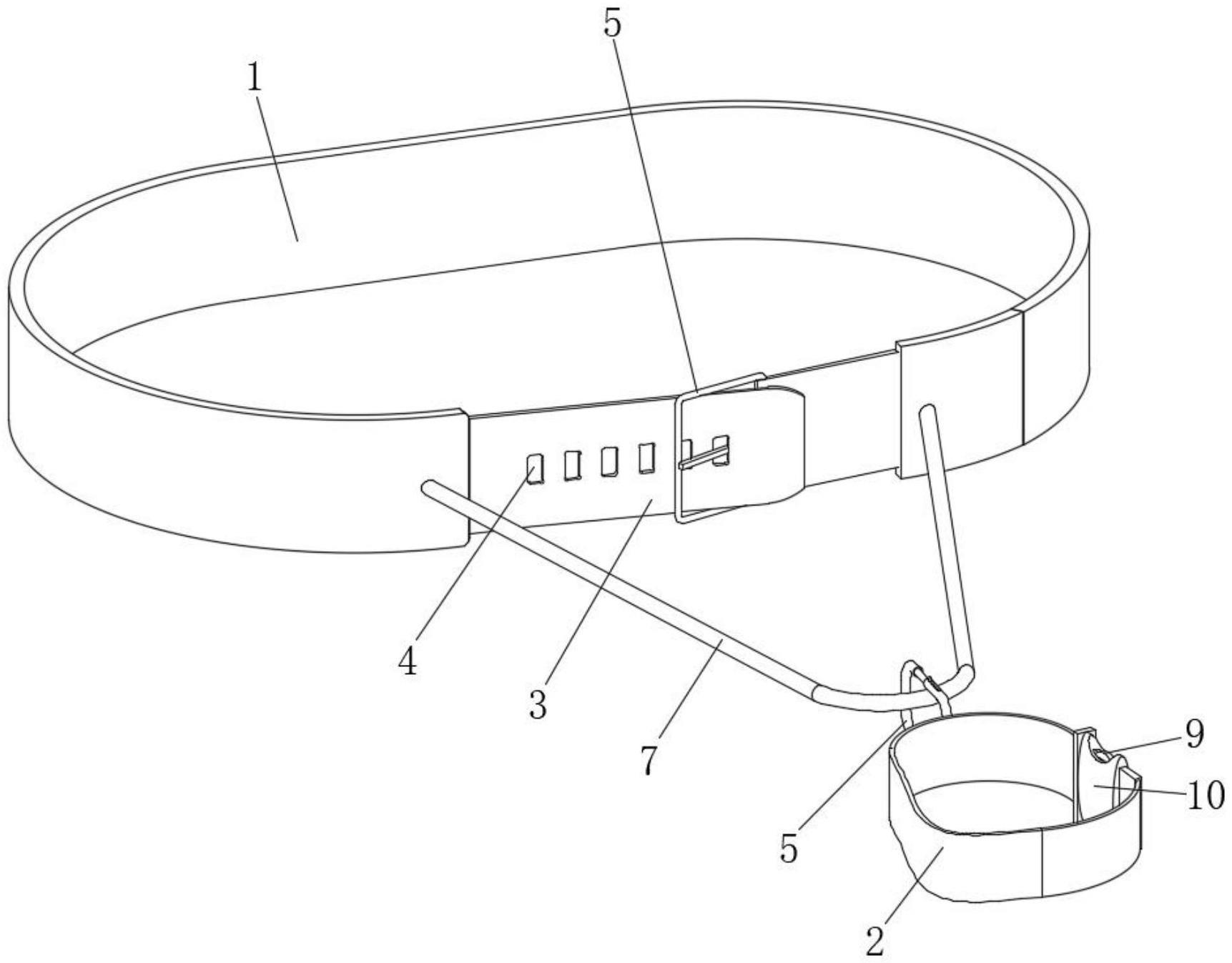
2、为实现上述目的,本实用新型提供如下技术方案:一种徒手牵引装置,包括腰带和固定带,所述腰带的一侧固定有限位带,所述限位带的表面开设有若干限位孔,所述限位带的另一端转动连接有固定环,所述固定环的表面转动连接有固定杆,所述固定杆与限位孔活动连接,所述限位带与固定环活动连接,所述腰带的正面固定有牵引绳,所述牵引绳的表面套设有固定环,所述固定带的内侧固定有凸块,所述固定环与凸块活动连接,所固定带的一侧固定有插口,所述固定带的另一端固定有卡扣,所述插口与卡扣活动连接,所述固定环的内部活动连接有限位结构。
3、优选的,所述限位结构包括滑动槽,所述滑动槽开设于固定环的内部,所述滑动槽的内部滑动连接有限位杆,所述限位杆与滑动槽之间设置有弹簧,所述限位杆的另一端与固定环活动连接。
4、优选的,所述限位杆的顶部固定有拉动块,所述拉动块与固定环滑动连接。
5、优选的,所述限位孔采用等距离设置,所述限位孔采用方形设计。
6、优选的,所述固定带采用弹力筋制成,所述固定带的宽度小于腰带的宽度。
7、优选的,所述牵引绳采用弹性材质制成,所述牵引绳的两端均与腰带固定连接。
8、与现有技术相比,本实用新型的有益效果如下:
9、本实用新型通过腰带配合固定带可以将病人的肢体与医护人员进行连接,在连接后通过医护人员自身活动即可对病人的肢体进行牵引,而且这样最少只需要一个人操作,降低了病人牵引所需的医护人员数量,该操作人员空出的双手也能进行手法辅助,大大提高了操作效率,而且固定杆配合限位孔可以调整腰带的内径,方便适用在不同体型的医护人员身上,解决了目前在对病人进行牵引操作时,需要多人同步配合,造成人员浪费的问题。
技术特征:
1.一种徒手牵引装置,包括腰带(1)和固定带(2),其特征在于:所述腰带(1)的一侧固定有限位带(3),所述限位带(3)的表面开设有若干限位孔(4),所述限位带(3)的另一端转动连接有固定环(5),所述固定环(5)的表面转动连接有固定杆(6),所述固定杆(6)与限位孔(4)活动连接,所述限位带(3)与固定环(5)活动连接,所述腰带(1)的正面固定有牵引绳(7),所述牵引绳(7)的表面套设有固定环(5),所述固定带(2)的内侧固定有凸块(8),所述固定环(5)与凸块(8)活动连接,所固定带(2)的一侧固定有插口(9),所述固定带(2)的另一端固定有卡扣(10),所述插口(9)与卡扣(10)活动连接,所述固定环(5)的内部活动连接有限位结构(11)。
2.根据权利要求1所述的一种徒手牵引装置,其特征在于:所述限位结构(11)包括滑动槽(111),所述滑动槽(111)开设于固定环(5)的内部,所述滑动槽(111)的内部滑动连接有限位杆(112),所述限位杆(112)与滑动槽(111)之间设置有弹簧(113),所述限位杆(112)的另一端与固定环(5)活动连接。
3.根据权利要求2所述的一种徒手牵引装置,其特征在于:所述限位杆(112)的顶部固定有拉动块(12),所述拉动块(12)与固定环(5)滑动连接。
4.根据权利要求1所述的一种徒手牵引装置,其特征在于:所述限位孔(4)采用等距离设置,所述限位孔(4)采用方形设计。
5.根据权利要求1所述的一种徒手牵引装置,其特征在于:所述固定带(2)采用弹力筋制成,所述固定带(2)的宽度小于腰带(1)的宽度。
6.根据权利要求1所述的一种徒手牵引装置,其特征在于:所述牵引绳(7)采用弹性材质制成,所述牵引绳(7)的两端均与腰带(1)固定连接。
技术总结
本技术涉及医疗用具技术领域,且公开了一种徒手牵引装置,包括腰带和固定带,所述腰带的一侧固定有限位带,所述限位带的表面开设有若干限位孔,所述限位带的另一端转动连接有固定环,所述固定环的表面转动连接有固定杆,所述固定杆与限位孔活动连接;本技术通过腰带配合固定带可以将病人的肢体与医护人员进行连接,在连接后通过医护人员自身活动即可对病人的肢体进行牵引,而且这样最少只需要一个人操作,降低了病人牵引所需的医护人员数量,大大提高了操作效率,而且该操作人员空出的双手也能进行手法辅助,解决了目前在对病人进行牵引操作时,需要多人同步配合,造成人员浪费的问题。
技术研发人员:丁智杰,田育魁,如司台木·买买提
受保护的技术使用者:新疆医科大学第四附属医院
技术研发日:20221209
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!