用于移动医疗设备以治疗或诊断患者的系统和方法与流程
本发明涉及根据独立权利要求的前序部分的用于使医疗设备在脉管网中移动的系统和治疗或诊断患者的方法。
背景技术:
1、在现有技术中,在人体内部采用设备来执行某些治疗通常是已知的。
2、例如,us2009/0076536a1公开了可被引入人体并执行医学治疗、特别是在体腔中提供空间支撑的微型机器人或设备。
3、us2013/0282173a1公开了可在患者体内移动并在其中执行医疗动作的遥控外科手术机器人。
4、wo2020/064663公开了一种带有回收线的医疗设备。
5、pancaldi等人(nat.commun.11,6356(2020))公开了使用流体动能传输通过脉管网的系留血管内微观探针。利用磁性致动,探针头可以变形,以实现动态转向。
6、然而,已知的设备具有几个缺点。具体地,难以实现在脉管网、尤其是在曲折的脉管网中进行可靠导航。在流动推动下磁性导航医疗设备通过多个分叉具有挑战性,因为必须为每个分叉均设置磁场。在高流量的情况下,系统的磁场可能不足以改变设备的方向。此外,通过连续分叉的自动磁性导航需要控制医疗设备的位置和磁性致动器。
技术实现思路
1、因此,本发明的任务是克服现有技术的缺点,特别是提供一种在脉管网中导航医疗设备的简单且可靠的方式。特别是,该系统和方法旨在自动化和/或优化磁性设备的引导。
2、这些任务和其他任务是通过根据本发明独立权利要求的特征部分的系统和方法实现的。
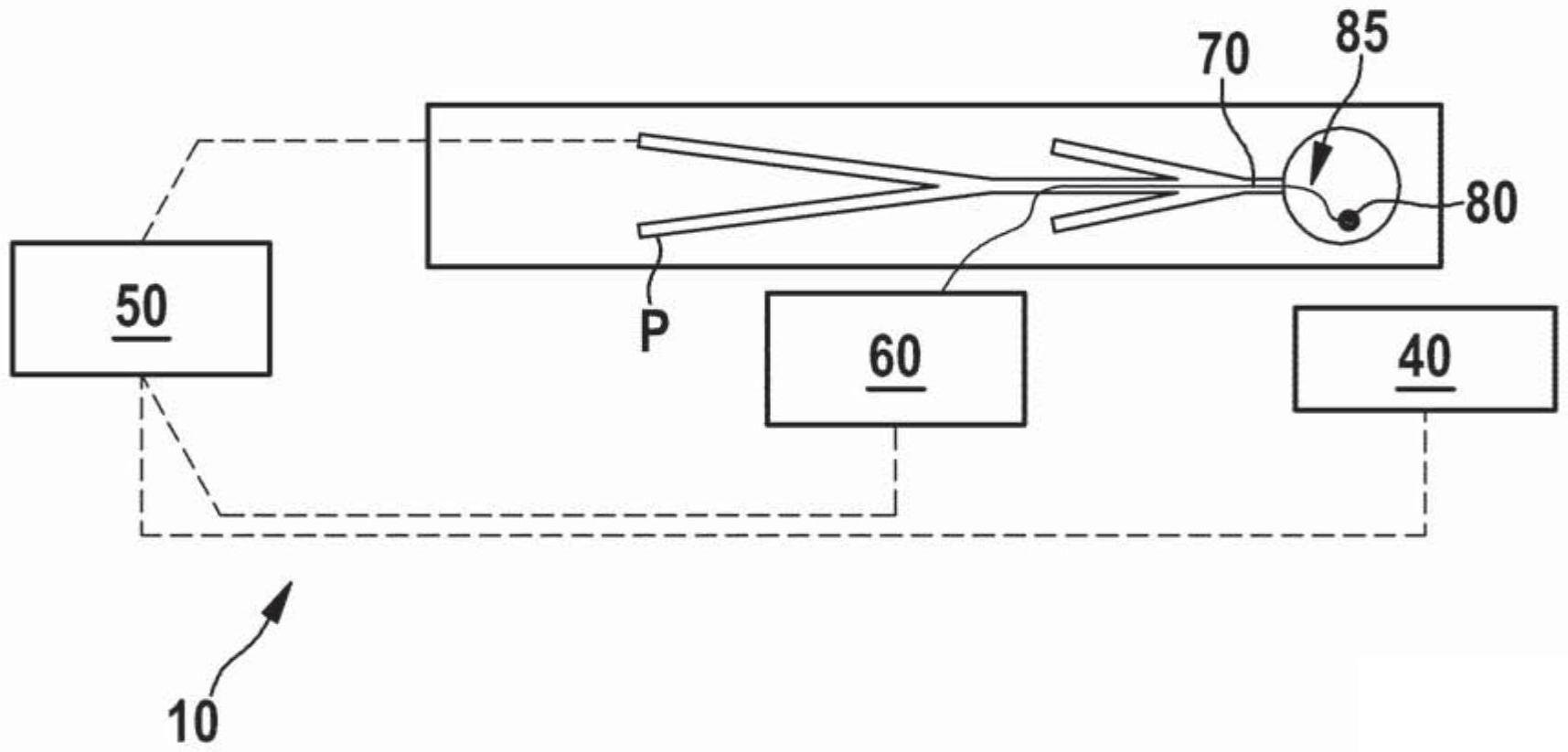
3、根据本发明的系统特别适于使医疗设备在脉管网中移动。该医疗设备尤其可以是可植入的设备。该医疗设备可以包括带有磁性部件的头部区段和带有控制线的后部区段。该医疗设备可以在脉管网中移动,以治疗或诊断患者。该系统包括磁性致动器、控制单元和控制线驱动器。控制线可以附接至控制线驱动器。控制线驱动器适于在所述控制线连接到控制线驱动器时,以不同的速度保持和/或释放控制线。磁性致动器适于在预定位置生成磁场。优选地,该磁场是预先确定的。磁场可以对医疗设备、特别是医疗设备的磁性部件施加力,从而沿预定方向拉动医疗设备。控制单元适于平衡施加至医疗设备的至少三个力。优选地,控制单元实时平衡这些力。优选地,这三个力包括由流体流(例如血管中的血液)作用至医疗设备的曳力、由控制线产生的力和由磁性致动器生成的磁力中的至少一个。控制线进一步操作磁性致动器和/或控制线驱动器。
4、控制线可以辅助磁性导航。本发明有助于在施加至医疗设备的以下不同力上找到良好的平衡:流动力、重力、控制力和磁力或作用至医疗设备以沿轨迹路径导航医疗设备的其他可能力。该系统可以自动计算这些力和这些力之间的关系,并限定由系统产生的力,特别是控制线力和磁力,以确保产生的力使医疗设备沿预定轨迹移动。
5、这种平衡模型还允许优化由磁性致动器和控制线引起的力的分布。力的平衡也可能有利于优化系统要求,例如像较低的磁场和/或较低的控制线力。
6、控制线驱动器可以包括、优选地由以下内容中的任一个或组合构成:滑轮、线性致动器、卷轴、电机、主轴、齿轮、螺杆和/或螺母、线性齿轮导轨和连续轨道中。控制线驱动器也可以包括这些元件中的任何一个的两个或更多个,也可以与任何一个、两个或更多的任何其他元件结合。
7、另外地或替代地,控制线驱动器也可以包括适于在控制线驱动器和控制线之间提供可操作的连接的控制线连接器。
8、优选地,控制单元可以包括处理器和/或存储器。在一个特别优选的实施例中,控制单元与电机可操作地连接,并适于控制电机的速度、功率和扭矩中的至少一个。
9、该速度可以至少部分地预先确定、自动确定或手动选择。可以想到采用预先确定的、自动确定的和手动选择的速度的组合。例如,控制单元可以基于血管中的计划轨迹计算合适的速度曲线,同时考虑所述血管中的血液流数据,并将速度曲线保存在存储器中。另外地或替代地,控制线的速度可以在干预过程中例如通过考虑计划轨迹和实际位置数据的反馈回路进行自动调整,和/或由用户手动调整。为此,该系统优选地包括供用户使用的界面,例如适于允许输入速度参数的一个或多个触摸屏、旋钮、按钮、拉杆。可以使用相同的或另外的界面以输入与控制医疗设备的位置和速度有关的进一步参数。
10、优选地,控制单元适于在磁性元件在空间中的设备位置定位时,计算空间中设备位置的磁场和/或由所述磁场施加至磁性元件的力。控制单元具体可以考虑磁性致动器的位置、方向和/或功率中的至少一个。另外地或替代地,控制单元可以适于从位于设备位置处或接近设备附近的传感器接收数据,特别是与设备位置处的磁场和/或力有关的数据。
11、另外地或替代地,该设备可以计算出适于在设备位置处实现磁场和/或磁力的磁性致动器的位置、方向、功率中的至少一个。磁场和/或磁力可以被定性地(例如,仅方向)或定量地计算。
12、可以想到的是,控制单元适于执行与磁性致动器有关的闭合反馈回路,即基于所需的力和/或磁场计算磁性致动器的位置、方向和/或功率,并例如基于实际测量的磁场和/或力调整或纠正所述位置、方向和/或功率。
13、控制单元可进一步适于计算和/或确定通过控制线作用至医疗设备的力。为此,控制单元可以包括力传感器和/或与其可操作地连接,该力传感器适于测量作用至医疗设备的力。控制单元可以控制该控制线驱动器,例如以释放控制线,同时保持通过控制线作用至医疗设备的力不变。替代地或另外地,控制单元可适于控制该控制线驱动器,例如以恒定速度释放控制线。然而,另外地或替代地,控制单元可适于控制该控制线驱动器,例如以基于作用至医疗设备的磁力确定的速度和/或回拉力来释放控制线。
14、特别优选地,控制单元可以通过控制线驱动器经由控制线控制和/或限制医疗设备的速度和位置中的一个。
15、控制单元可以进一步计算和/或确定由于周围血液流而作用至医疗设备的曳力。该系统可包括适于测量设备位置(例如多普勒超声设备)处的血液流速度的传感器。另外地或替代地,可以考虑由力传感器提供的力数据。另外地或替代地,该系统可以包括存储设备,其包含在治疗前或治疗期间根据血管中的位置获得的血液流数据。
16、因此,控制单元适于平衡可能作用至医疗设备的三个力。平衡多个力可以具体理解为响应于和/或基于多个力中的至少一个其它力、优选是所有其它力来调整至少一个力的大小。
17、控制单元可以适于增加或减少作用至医疗设备的磁力,方式为根据血液流和/或控制线施加至医疗设备的力调整磁性致动器的位置、方向和/或功率中的至少一个。例如,如果血液流施加至医疗设备的力太小不足以使医疗设备沿血管的纵轴移动,那么控制单元可以调整磁性致动器的运行,例如以至少部分地沿大致平行于纵轴的方向施加力,例如从而推动医疗设备前进。
18、另外地或替代地,控制单元可以被调整为提高或降低控制线的释放速度,这取决于血液流施加至医疗设备的曳力和/或磁性致动器施加至医疗设备的磁力。例如,控制单元可以确定,由于空间限制或组织与磁性致动器之间的距离,可用的磁力可能是有限的,和/或由于血液流施加的曳力足够大,以至于可用的磁力不足以使医疗设备沿预定方向移动。因此,控制单元可以操作控制线驱动器,以减慢和/或停止控制线的释放,例如以减慢和/或停止医疗设备。因此,由于医疗设备的速度较低(特别是与周围的血液流相比),较小的磁力足以使医疗设备沿预期方向移动。
19、该系统可包括用于定向磁场的定向装置。定向装置可以与控制单元可操作地连接。对于由永磁体生成的磁场,可以通过移动磁性致动器来定向,特别是通过使用具有臂、铰链、叠缩器、轮子、齿轮、导轨和其他及其组合的定向装置来定向。特别地,这些定向装置可以包括用于移动永磁体的、具有六个自由度的机器人手臂。
20、在由非永磁体生成的磁场的情况下,磁场的定向可以通过改变电磁铁的电流和/或通过使用所述用于永磁体的定向装置来完成。
21、在根据本发明的一个实施例中,该系统另外地或替代地用于通过使用优选是可植入的医疗设备来治疗或诊断患者,该医疗设备具有磁性部分,其形状、尺寸和表面结构限定了该医疗设备被体液拖动时的运动部件。该系统包括磁性致动器、控制单元和控制线驱动器。控制线可以附接至控制线驱动器。控制线驱动器与或能够与控制单元可操作地连接,以便在控制线附接至控制线驱动器时,沿着控制线的轴线的位置、运动和速度中的至少一个能够通过控制单元经由控制线驱动器控制。另外地或替代地,控制单元可适于至少部分地控制医疗设备的位置和/或速度,当通过附接至控制线驱动器的控制线与控制单元可操作地连接时,在血管内通过控制线驱动器的位置、速度和运动中的至少一个来控制。
22、控制单元可进一步适于优选地在垂直于血管纵轴线的平面内和/或在平行于血管纵轴线的方向上通过磁力驱动器控制医疗设备在血管内的位置。优选地,控制单元适于考虑由血液流施加至医疗设备的曳力,其用于致动磁性致动器和/或控制控制线的运动或位置。另外地或替代地,控制单元可以进一步适于基于控制线的速度驱动磁性致动器,或者基于由磁性致动器生成的磁场调节控制线的速度。特别优选地,控制单元适于确定分别由血液流、磁力和控制线施加至医疗设备上的三个力分量,并控制控制线驱动器和磁性致动器,例如以平衡这三个力分量,从而实现医疗设备的预期运动。
23、该系统优选地包括医疗设备,该医疗设备具有磁性部件,其形状、尺寸和表面结构限定出了医疗设备被体液拖动时的运动部件。
24、优选地,该医疗设备是适于在患者体内执行功能的微型机器人。该微型机器人可以例如机械地去除组织、释放药物、提供热或冷、引起血栓形成和/或去除血栓。
25、特别优选地,该医疗设备包括至少一个第一表面部分,其被配置成在水状介质中、特别是在血液中使曳力最大化。该表面部分可以至少部分地布置在医疗设备的周向、特别是在垂直于由该线限定的纵轴的平面内。因此,血液的前向推进力(即曳力)可以被最大化。另外地或替代地,有利的是包括第二表面的孔、特别是布置在尖端/与由控制线限定的纵轴相交的孔,该孔最小化与水介质的摩擦力,以减少引导所需的磁力。
26、优选地,医疗设备头部区段和/或控制线的密度、特别优选地是医疗设备整体的密度大致与水或血液、特别是生理条件下的水或血液(即在37℃和生理盐浓度下)的密度相同。因此,该医疗设备可以无需考虑重力地在血管中导航。
27、另外地或替代地,该系统可以进一步包括控制线。控制线连接或可连接至控制线驱动器,以便与控制单元形成可操作的连接。
28、特别优选地,控制线连接或可连接至医疗设备头部区段。
29、在一些实施例中,控制线驱动器可适于特别是以受控的速度和/或受控的力控制控制线的释放。特别优选地,控制线驱动器可适于拉回控制线。为此,控制线可以适于特别通过材料选择和/或尺寸和/或结构使其具有一定的强度,特别是抗拉强度或屈服强度,当医疗设备沿与血液流相反的方向移动时,足以承受由血液流引起的曳力。
30、根据前述权利要求中任何一项所述的系统,其中该系统具有检测部件,该部件适于检测血管系统中的分叉。例如,该检测部件可包括成像分析软件和/或用于接收成像数据的接口。替代地或另外地,该系统可以包括在存储器中代表分叉的位置和方向的数据,其中检测部件适于通过接口读取这些数据。
31、优选地,系统被配置成确定用于移动医疗设备所需的最小磁力,例如以在分叉处引导磁性设备,该确定基于医疗设备的当前速度和医疗设备、特别是医疗设备头部区段与分叉之间在血管内流动方向上的间距完成。
32、优选地,磁性致动器包括电磁铁和永磁体中的至少一个。磁性致动器可以产生具有梯度的磁场。电磁铁尤其有利,因为它们提供了可调磁场。
33、根据本发明的系统由此允许在血管中简单且可靠地导航。特别地,为了引导、导航或转向医疗设备,该系统不一定要求医疗设备(特别是其头部区段)响应于磁性驱动地发生形状改变,例如弯曲。替代地,该系统允许不受流动特性影响地调整磁性致动。例如,如果血液流几乎为零或非常快,医疗设备仍可在血管中导航。此外,该系统可以允许在磁性驱动设备及其操作中具有更高的灵活性,因为不依赖于形状变化地使用由磁场施加的力,来实现水动能的方向变化。因此,可能没有必要实现磁场相对于医疗设备、特别是医疗设备头部区段的特定取向。然而,可以理解的是,适于响应磁性致动而改变形状的医疗设备可以与根据本发明的系统相结合。
34、此外,根据本发明的系统更加可靠,因为借助于控制线对医疗设备的位置和速度的另外控制允许更长的反应时间,使程序不容易出错。此外,控制线可用于手动或自动地至少部分缩回医疗设备,允许简单地纠正导航路径。
35、由于借助控制线可实现的对医疗设备速度的限制,可采用较弱的磁力/磁场导航。因此,空间和能量需求均降低,形成更便宜且更简单的治疗选择。此外,本领域已知设备通常需要的强磁场可能不适于具有某些类型植入物(如心脏起搏器)的患者。
36、特别地,在流体中致动所需的磁力和由此的磁性致动器的重量通常随着流体的流速而增加。相比之下,减缓和/或停止医疗设备可以允许不受流体流速影响地使用恒定的和/或较低的磁力来驱动医疗设备,从而可以减少磁性致动器和系统的总重量。
37、因此,优选地,磁性致动器被配置成例如生成不足以使医疗设备抵抗血流流动的磁力。磁性致动器尤其可以是对应进行尺寸设计的永磁体或电磁铁。只提供有限磁场强度的磁性致动器可能更小、更便宜、对患者更安全。
38、优选地,控制单元适于平衡施加至医疗设备的至少四个力。至少四个力中的一个可以是优选医疗设备头部区段和/或控制线的重力或与血管壁的接触的接触力。
39、为此,控制单元可以进一步适于由医疗设备的特性和位置计算重力和/或检测(例如基于成像数据)医疗设备的运动方向和/或医疗设备头部区段和/或控制线是否与血管壁接触。特别优选地,控制单元可适于定量计算由于医疗设备头部区段和/或控制线与血管接触而作用至医疗设备的力中的至少一个。另外地或替代地,控制单元可以适于接收来自测量作用至医疗设备的接触力的传感器的数据。
40、优选地,控制单元适于考虑控制线与血管壁之间的摩擦力。
41、控制单元可以以上述任何方式(例如从成像数据、特别是三维成像数据)确定摩擦力。控制单元也可以基于存储在存储器中的数据来计算摩擦力。例如,平均或正常的摩擦力分量可以存储和/或计算并单独或与成像数据结合使用。另外地或替代地,该系统可以包括适于测量摩擦力的传感器和优选地通过存储器向控制单元提供摩擦力数据的接口。
42、优选地,控制单元适于平衡由头部部分与血管壁引起的接触力,特别是摩擦力、粘附力和穿透力。
43、优选地,表示摩擦力、粘附力和穿透力中的至少一个的数据被存储在存储器中,其中控制单元适于通过接口访问这些数据。摩擦力、粘附力和穿透力这些不同的力可以由数值模型计算出来,这些数值模型可以存储在通过系统可访问的存储器中。这些数值模型可以使用血管的几何数据,特别是从术前和/或术后成像中提取的。
44、优选地,该系统包括至少两个磁性致动器。控制单元优选地适于控制至少两个磁性致动器。
45、两个或更多个磁性致动器可以提供更精确的磁力调整,特别是如果只采用弱磁力的话。此外,多个磁动器允许更加灵活性地引导医疗设备,并且可以沿由于空间限制磁性致动器的移动而可能无法进入的方向进行导向。
46、优选地,控制单元包括成像系统和用于从成像系统接收术中数据的接口、优选用于接收成像数据的输入接口中的至少一个。控制单元可以适于定位医疗设备的位置,特别是医疗设备头部区段的位置。
47、成像系统可以是本领域已知的任何成像设备,特别是介入系统,比如,cath lab、超声成像系统、磁共振设备、荧光镜、x射线成像设备和/或计算机断层扫描。
48、优选地,控制单元通过相对于医疗设备布置的定位元件检测医疗设备的位置。
49、另外地或替代地,控制单元可以包括成像分析软件,其适于检测医疗设备在生成的成像数据上的位置。
50、控制单元可以在存储器中存储定位数据,特别是用于计算如上所述的磁力和曳力。
51、优选地,控制单元适于基于代表预定血管路径的轨迹数据计算至少一个力,特别是上述任何一个力。
52、优选地,控制单元包括供用户输入轨迹数据的界面,其中轨迹数据被存储在存储器中。
53、优选地,控制单元适于控制控制线驱动器,以便在将至少一个磁性致动器移动至下一个位置时减缓和/或停止医疗设备的位移。
54、特别是当随后的分叉彼此较近时,减缓和/或停止医疗设备可以提供更多的时间来准确定位磁性致动器。
55、此外,根据患者的解剖结构和沿计划路径的分叉位置,可能无法在不沿非预期方向移动医疗设备的情况下直接将磁性致动器移动至下一位置。在这种情况下,停止医疗设备可能允许磁性致动器的移动,而不会无意中推动医疗设备前进。类似地,通过减慢和/或停止医疗设备获得的另外时间可以允许在必要时移开磁性致动器,即避免医疗设备沿非预期方向移动的位置。
56、另外地或替代地,该系统可以被配置成在分叉的上游位置停止医疗设备相对于分叉的运动。
57、优选地,控制线驱动器包括力传感器。该传感器可适于测量血液或其他介质施加至医疗设备的曳力。该力传感器可以功能性地布置在控制线和控制线驱动器之间,并至少部分地形成用于连接控制线驱动器和控制线的接口。
58、力传感器可以是本领域内已知的任何力传感器,特别是压电传感器、弹簧传感器、扭矩传感器、电容器或其他传感器。
59、力传感器可以提供实时的力数据,例如,通过接触血管壁或血液流施加至控制线的力。
60、另外地或替代地,该系统可以包括并非为控制线驱动器的部分的其他力传感器。例如,力传感器可以布置在医疗设备、医疗设备头部区段和控制线之间的接口或其他位置处或者形成上述内容的部分。
61、优选地,控制线驱动器包括至少一个接口,以触发医疗设备的至少一个功能和/或为其供电。
62、控制线驱动器可以包括电源,比如电插头、电池或本领域已知的任何其他电源。另外地或替代地,控制线驱动器可以适于以无线方式向医疗设备传输电力。例如,可以使用rfid技术向医疗设备供电。
63、控制线驱动器的尺寸、形状和材料优选能够可以连接在患者侧。特别地,控制线驱动器可以适于在无菌环境中使用。
64、控制线优选地嵌入无菌特征中。无菌特征是一种保护控制线驱动器不与非无菌元件接触的物理元件。无菌特征可以是袋子、盒子。在一个实施例中,控制线支架和控制线被嵌入无菌特征中。
65、控制线驱动器的无菌特征可以填充有无菌溶液,特别是等渗溶液。
66、优选地,该系统包括多个控制线驱动器,优选是两个、三个或四个控制线驱动器。控制单元可适于操作磁性致动器和多个控制线驱动器,以控制多个医疗设备的导航,特别优选其中一个医疗设备分别可附接至或附接至一个控制线驱动器。
67、在一个优选的实施例中,该系统进一步包括流动构件,其适于至少在医疗设备附近加速或减缓血液流。例如,流动构件可以机械地或通过释放药物压缩或扩大血管,局部升高或降低血压,或局部限制或扩大血管的横截面。
68、该系统优选地包括用于控制和/或减少和/或增加血管中血液流的机构。特别优选地,使用附接至输送导管和独立导管的球囊。然而,也可以想到使用外部设备,例如压缩设备。
69、可以理解的是,流量的局部变化可能会导致在不同区域中(可能是远程的和/远侧的)发生流量方向和/或强度的变化。
70、可以理解的是,用于控制和/或减少血液流的机构可以附接至或可附接至医疗设备和/或输送导管的任何部分。替代地,该机构可以被配置成单独的设备。
71、减少或增加特定血管中的血液流可以是有利的,并在整个导航过程中提供更好的控制。
72、该系统可进一步包括至少两个控制线驱动器。每个控制线驱动器可由控制单元独立控制。一条控制线附接至或可附接至每个控制线驱动器,因此可以被独立控制。
73、当至少两条控制线附接至同一医疗设备时,此构型允许使用控制线另外转向和/或旋转医疗设备。
74、然而,可以理解的是,至少两个控制线驱动器也可用于独立控制至少两个单独的医疗设备的运动。
75、本发明还涉及一种治疗或诊断患者的方法。优选地,该方法使用本文所述的系统进行。该方法包括以下步骤:
76、-在患者的血管中引入医疗设备。
77、-计算施加至医疗设备的平衡力,以生成合力,其中该合力能够使医疗设备沿预定路径移动。
78、-优选地通过控制单元操作至少一个磁性致动器,以在至少一个预先确定的位置生成至少一个磁场。
79、-调整附接至医疗设备头部区段的控制线的释放速度。
80、优选地,通过控制单元计算通往目标区域的最佳路径。替代地,代表由用户确定的最佳或期望路径的数据可以通过接口输入存储器。
81、优选地,该方法进一步包括使医疗设备沿预定路径移动的步骤。
82、优选地,该方法包括使医疗设备在分叉前停下来的另一个步骤。
83、另外地或替代地,该方法可以进一步包括以下步骤中的任何一个或其任何组合:
84、-基本仅通过血液流施加的曳力,使医疗设备在血管内沿着与血液流基本一致的方向移动;
85、-通过施加力至连接至医疗设备头部区段的控制线来控制医疗设备的速度,其中该力优选地朝着与血管内血液流动方向相反的方向导向;
86、-检测血管中的分叉;
87、-通过控制控制线在分叉的上游位置降低医疗设备的速度,优选地使医疗设备停下来;
88、-通过磁性致动器,沿垂直于血管纵轴的方向移动医疗设备,以朝向分叉的一个分支引导医疗设备。
89、-优选地释放该线,以便通过血液流施加的曳力来加速医疗设备。
90、本发明进一步涉及一种医疗设备,优选微型机器人。该医疗设备特别适合与上述系统一起使用和/或在如上所述的方法中使用。可以理解的是,该医疗设备可以具有本文中系统背景下描述的任何特征。该医疗设备可以包括磁性部件,该磁性部件可以与磁性致动器可操作地连接,并且优选地至少有一个表面部分适于在水介质、特别是血液中最大化该曳力。医疗设备头部区段连接或可连接到控制线。
- 还没有人留言评论。精彩留言会获得点赞!