用于图像引导手术中的非接触式患者配准的方法和系统与流程
用于图像引导手术中的非接触式患者配准的方法和系统
1.相关申请
2.本技术要求于2021年3月17日提交的并且名称为“用于基于电磁的图像引导手术中的非接触式配准的方法和系统(method and system for non-contact registration in electromagnetic-based image guided surgery)”的美国临时申请63/162,421号和于2022年3月11日提交的并且名称为“用于基于电磁的图像引导手术中的非接触式配准的方法和系统(method and system for non-contact registration in electromagnetic-based image guided surgery)”的美国实用申请17/654,505号的优先权,这两个申请据此全文以引用方式并入本文。
技术领域
3.本公开整体涉及以外科手术方式治疗患者的系统和方法。更具体地,本公开涉及用于相对于术前图像在外科手术区域内跟踪医疗器械的系统和方法。在一些实施方案中,本公开涉及用于将感兴趣区域和参考框架的空间扫描图像与术前图像进行配准的系统和方法。
附图说明
4.从结合附图作出的以下描述和所附权利要求书,本文所公开的实施方案将变得更加显而易见。这些附图仅描绘将通过使用附图以附加的特异性和细节来描述的典型实施方案,在附图中:
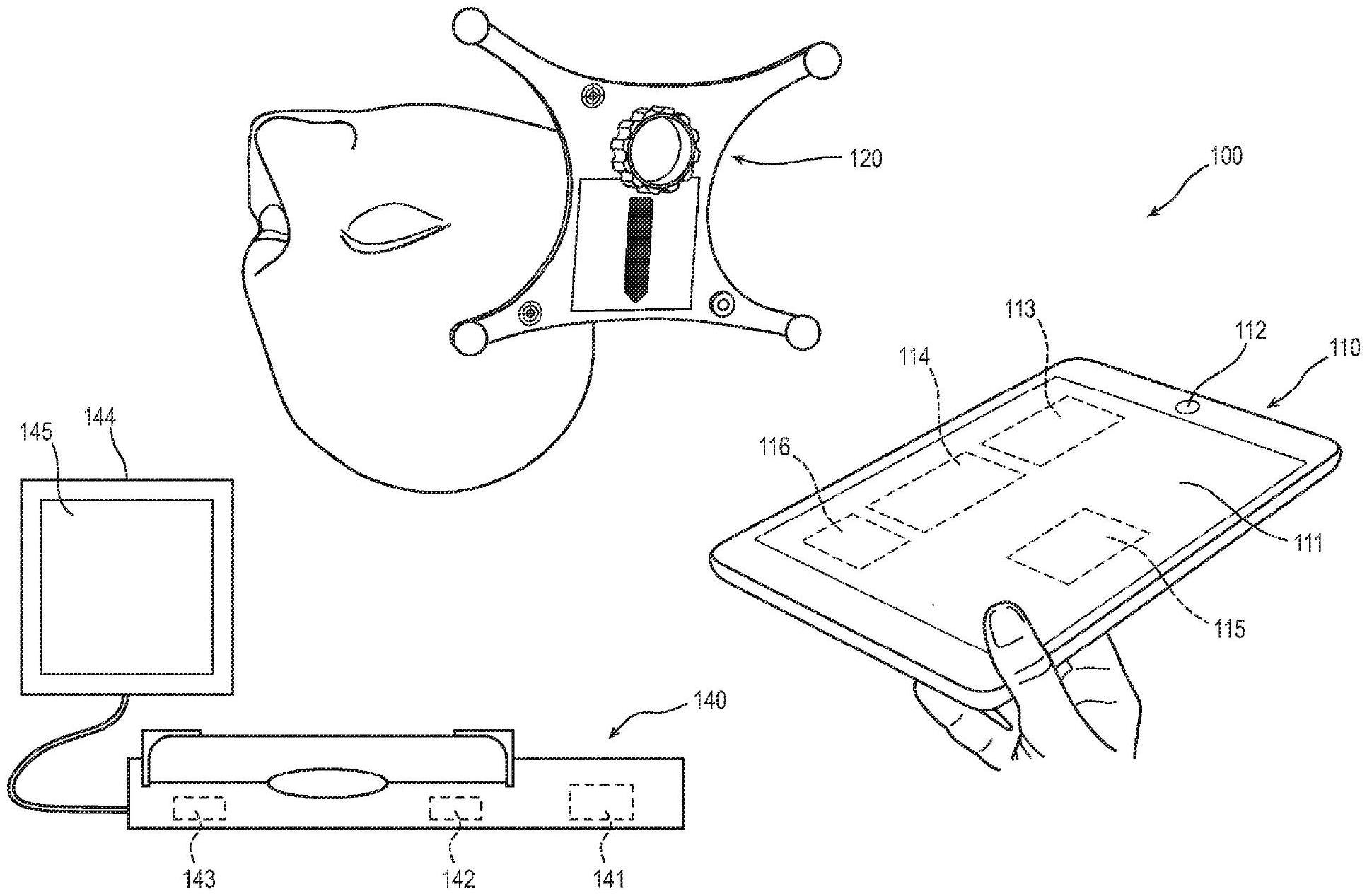
5.图1是非接触式患者配准系统的实施方案的示意图。
6.图2是图1的非接触式患者配准系统的3d扫描设备的实施方案的透视图。
7.图3是图1的非接触式患者配准系统的光学参考框架的实施方案的透视图。
8.图4是非接触式患者配准系统的方法的流程图。
9.图5是图1的外科手术配准系统在图3的非接触式患者配准的方法的步骤期间的示意图,在该步骤中,利用图2的3d扫描设备对图3的光学参考框架和患者的感兴趣区域进行空间扫描以获取空间数据点。
10.图6是图4的非接触式患者配准的方法的步骤的输出图像,在该步骤中,根据空间数据点生成数字网格模型。
11.图7是图4的非接触式患者配准的方法的步骤的输出图像,在该步骤中,确定了参考框架网格模型的位置,并且将参考框架配准模型与参考框架网格模型进行配准。
12.图8是图4的非接触式患者配准的方法的步骤的输出图像,在该步骤中,识别数字网格模型和患者配准模型的解剖特征。
13.图9是图4的非接触式患者配准的方法的步骤的输出图像,在该步骤中,将数字网格模型与患者配准模型部分配准。
14.图10是图4的非接触式患者配准的方法的步骤的输出图像,在该步骤中,将数字网格模型与患者配准模型完全配准。
15.图11是图1的非接触式患者配准系统的示意图,其中对外科手术器械相对于参考框架和患者配准模型的位置加以跟踪。
16.图12是非接触式患者配准系统的另一实施方案的示意图。
17.图13是带有图12的外科手术配准系统的aruco光学跟踪器附件的电磁参考框架的透视图。
具体实施方式
18.在某些情况下,患者可需要对他的/她的身体的临床医生无法读取的区域(诸如患者的大脑)进行外科手术治疗。在这些情况下,可以在外科手术治疗之前获取治疗区域或感兴趣区域(roi)的诊断图像或术前图像。例如,术前图像可以是磁共振图像(mri)或来自计算机断层(ct)扫描以及其他成像模式的图像。在开始外科手术治疗之前,可以生成roi的3d数字模型。可以将该3d数字模型配准到导航坐标系统,以在外科手术治疗期间提供电磁(em)或光学导航。
19.本公开范围内的示例性设备和方法涉及roi和参考框架的数字网格模型与术前图像(包括,例如,根据术前图像生成的3d模型)的非接触式或无接触式患者配准,以使用em或光学外科手术导航治疗身体的各个区域,包括大脑内的治疗。本公开范围内的系统和方法包括roi和参考框架的数字网格模型与患者术前图像的非接触式患者配准。例如,本公开范围内的非接触式患者配准系统可生成患者头部和参考框架的数字网格模型,并将数字网格模型与患者配准模型或术前图像配准。尽管本文描述了与脑部治疗有关的具体示例,但本公开可类比应用于其他部位的治疗,诸如耳部、鼻部、喉部;胸腔;腹部;和其他区域。
20.在本公开范围内的一些实施方案中,非接触式患者配准系统可包括3d扫描设备、参考框架和工作站。3d扫描设备可包括相机、镜头、处理器、存储器构件和无线通信设备。工作站可包括处理器、存储设备(例如,非暂态存储设备)和无线通信设备。在某些实施方案中,参考框架可包括被配置为耦接到头部保持器的结构。在其他实施方案中,参考框架可包括二维条形码附件和/或em跟踪构件。
21.在本公开范围内的某些治疗中,3d扫描设备可被配置为对roi和参考框架进行空间扫描以捕获空间数据,并且处理该空间数据以生成roi和参考框架的数字网格模型。3d扫描设备和/或工作站可被配置为检测参考框架在数字网格模型内的位置,将参考框架的配准模型与参考框架的数字网格模型配准,检测数字网格模型和患者配准模型内的解剖特征,使用所检测到的解剖特征将数字网格模型与患者配准模型配准,跟踪外科手术器械相对于参考框架的位置,并且确定外科手术器械相对于配准模型的位置。在一些实施方案中,检测和配准步骤可由处理器自动执行,无需附加的用户输入。在某些实施方案中,3d扫描设备可在非接触式患者配准方法期间经由无线或有线通信技术与工作站通信。
22.参考附图可理解实施方案,其中在整个附图中类似的部分由类似的标号来表示。受益于本公开的本领域的普通技术人员将容易理解,如本文在附图中一般描述和示出的实施方案的部件可以各种不同配置来布置和设计。因此,如附图中表示的各种实施方案的以下更详细描述并不旨在限制本公开的范围,而是仅表示各种实施方案。虽然附图中呈现了实施方案的各个方面,但附图未必按比例绘制,除非特别指出。
23.图1示意性地示出非接触式患者配准系统的实施方案。图2示出非接触式患者配准
系统的3d扫描设备的实施方案。图3示出非接触式患者配准系统的光学参考框架的实施方案。图4示出非接触式患者配准系统的方法的流程图。图5示意性地示出了在非接触式患者配准的方法的步骤期间的外科手术配准系统,在该步骤中,对参考框架和患者的roi进行空间扫描以获取空间数据点。图6描绘了非接触式患者配准的方法的步骤的输出图像,在该步骤中,根据空间数据点生成数字网格模型。图7描绘了非接触式患者配准的方法的步骤的输出图像,在该步骤中,确定参考框架网格模型的位置,并且将参考框架配准模型与参考框架网格模型进行配准。图8描绘了非接触式患者配准的方法的步骤的输出图像,在该步骤中,识别数字网格模型和患者配准模型的解剖特征。图9描绘了非接触式患者配准的方法的步骤的输出图像,在该步骤中,将数字网格模型与患者配准模型部分配准。图10描绘了非接触式患者配准的方法的步骤的输出图像,在该步骤中,将数字网格模型与患者配准模型完全配准。图11示意性地示出了外科手术配准系统,其中对外科手术器械相对于参考框架和患者配准模型的位置加以跟踪。图12示意性地示出了包括em参考框架的非接触式患者配准系统的另一实施方案。图13示出了em参考框架。在某些视图中,每个装置可联接到未包括在每个视图中的附加部件上,或与该附加部件一起示出。此外,在一些视图中,仅示出所选择的部件来提供关于部件的关系的细节。一些部件可在多个视图中示出,但并未结合每个视图予以讨论。结合任何附图提供的公开内容是相关的并且适用于结合任何其他附图或实施方案提供的公开内容。
24.图1示出了非接触式患者配准系统100的实施方案。如图所示,非接触式患者配准系统100可包括3d扫描设备110、参考框架120和工作站140。在示例性外科手术环境中示出非接触式患者配准系统100,该示例性手术环境可包括图像处理器102、光学导航设备146、术中3d成像设备,诸如计算机断层扫描仪。
25.图2示出了3d扫描设备110的实施方案。3d扫描设备110可以是手持式计算设备,诸如相机、具有集成相机的智能手机、具有集成相机的数字计算机平板(例如,平板电脑)、耦接到相机的膝上型计算机、独立的3d扫描仪等。在某些实施方案中,3d扫描设备110可耦接到手柄,以方便用户操纵3d扫描设备110。对3d扫描设备110的操纵可包括侧向运动、竖直运动、圆周运动、弧形运动和其他运动,以捕获roi的空间数据。在一些实施方案中,光学扫描设备110或任何其他跟踪系统都不跟踪光学扫描设备110的运动。在其他实施方案中,光学扫描设备110可安装到固定支架。
26.如图2所描绘,3d扫描设备110包括屏幕111、相机113、耦接到相机113的镜头112、处理器114、存储设备115和无线通信设备116。3d扫描设备110的尺寸被设定为并且被配置为由单手或双手握持,以便在操作期间进行手动操纵。3d扫描设备110没有或不包括任何类型的位置跟踪器或参考标记。例如,3d扫描设备110没有或不包括跟踪器或参考标记,使得可使用光学、电磁、声波等定位或跟踪技术来跟踪3d扫描设备110的位置或定位。相机113可以是被配置为以数字方式捕获通过镜头112接收到的空间数据的任何合适的类型。例如,相机113可包括数字半导体图像传感器,诸如被配置为捕获通过镜头112的光线并将该光线转换为空间数据诸如空间数据云的电荷耦合器件(ccd)传感器或互补金属氧化物半导体(cmos)传感器。其他传感器,诸如激光成像、检测和测距(激光雷达)传感器,结构光传感器,光学/红外波长传感器等,也在本公开的范围内。镜头112可以是用于将光线传输到相机113的任何合适的类型。例如,镜头112可以是微距镜头、远摄镜头、广角镜头、鱼眼镜头等。在一
些实施方案中,镜头112由3d扫描设备110以电子方式控制(例如,聚焦、变焦等)。在其他实施方案中,镜头112由用户手动控制。
27.处理器114可以是被配置为接收和执行来自存储设备115的指令的任何合适的类型。例如,处理器114可类似于由商用智能手机或平板设备使用的处理器。例如,处理器可以是基于arm的或基于intel的。存储设备115可以是被配置为存储由处理器114执行的指令和存储从相机113接收的空间数据的任何合适的类型。例如,存储设备115可以是闪存、rom、prom、eprom、eeprom、dram、sram以及它们的任意组合。考虑其他类型的存储装置。
28.屏幕111可被配置为直观地显示由处理器114生成的信息。屏幕111可包括液晶显示器(lcd)、有机发光二极管(oled)或任何其他合适的显示材料。屏幕111可以是非交互式的或交互式的(例如,触摸屏)并且尺寸被设定为易于阅读。屏幕111的对角线尺寸可在约4英寸至约10英寸的范围内。
29.无线通信设备116可包括任何合适的部件,以允许3d扫描设备110与工作站140无线地传达信息,并允许工作站140与3d扫描设备110无线地传达信息。信息可包括空间数据、数字网格模型、配准模型等,如下文将进一步描述的。通信可以经由wifi或蓝牙进行。其他无线通信技术也在本公开的范围内。无线通信设备116可包括wifi模块或蓝牙电路。在其他实施方案中,3d扫描设备110可经由耦接到三3d扫描设备110和工作站140的线缆与工作站140直接通信。
30.如图1所示,工作站140可从3d扫描设备110远程设置并与该3d扫描设备无线通信。工作站140可包括处理器141、存储设备142和无线通信设备143。处理器141可以是被配置为接收和执行来自存储设备142的指令的任何合适的类型。例如,处理器141可以是基于intel的。考虑其他类型的处理器。存储设备142可以是被配置为存储由处理器141执行的指令并且存储从3d扫描设备110接收的空间数据和数字网格模型、患者配准图像、参考框架配准图像等的任何合适的类型。例如,存储设备142可以是闪存、rom、prom、eprom、eeprom、dram、sram以及它们的任意组合。考虑其他类型的存储装置。无线通信设备143可包括任何合适的部件,以允许3d扫描设备110与工作站140无线地传达信息,并允许工作站140与3d扫描设备110无线地传达信息。信息可包括从光学扫描设备110接收的空间数据和数字网格模型、术前图像、参考框架配准图像等。通信可经由wifi或蓝牙无线技术进行。其他无线通信技术也在本公开的范围内。无线通信设备143可包括wifi模块或蓝牙电路。在其他实施方案中,光学扫描设备110可经由耦接到光学扫描设备110和工作站140的线缆与工作站140直接通信。在一些实施方案中,工作站140可包括用于显示来自处理器141和/或存储设备142的信息的监视器。在一些实施方案中,非接触式患者配准系统100可以不包括工作站140。在这样的实施方案中,3d扫描设备110可被配置为实行如本文所公开的非接触式患者配准所需的所有操作。
31.图3示出了光学参考框架120的实施方案。如图所示,光学参考框架120可包括结构121。在所示的实施方案中,结构121包括几何形状,该几何形状具有主体部分125、从主体部分125径向向外延伸的四个臂构件123和设置在主体部分125上的旋钮126。在其他实施方案中,结构121可包括两个、三个、五个或更多个臂构件123。反射器122可设置在臂构件123中的每个臂构件的端部处。反射器122可被配置为在导航外科手术程序期间由光学跟踪相机进行检测。在一些实施方案中,结构121的至少一个臂构件123可耦接到头部保持器,以相对
于保持在头部保持器中的患者的头部来稳定结构121。在其他实施方案中,结构121可在臂构件123中的三个臂构件处耦接到头部保持器,其中第四臂构件123与患者的头部相邻设置。在其他实施方案中,旋钮126可使用诸如螺钉等的紧固件耦接到头部框架或患者台。考虑其他几何形状在本公开的范围内。例如,结构121可具有圆形、椭圆形、三角形、四边形、五边形形状等。在所描绘的实施方案中,结构121包括用于指示结构121的取向的识别标签124。在另一实施方案中,结构121可包括用于提供在如扫描设备所捕获到的视觉区域内的坐标的二维快速响应(qr)标签(例如,aruco标记)。在一些实施方案中,识别标签124可以是彩色编码的。
32.图4示出了描绘方法300的步骤的流程图,这些步骤用于生成患者的roi和参考框架的数字网格模型,并且将该数字网格模型与患者和参考框架配准模型配准。如图所描绘,该方法可包括以下各项中的一者或多者:利用光学扫描设备扫描301患者的roi和参考框架以收集空间数据;根据空间数据的三维云点图像自动生成302数字网格模型;自动检测303数字网格模型内的参考框架;自动确定304光学参考框架在数字网格模型内的位姿(例如,位置和取向);自动配准305参考框架的配准模型与数字网格模型的光学参考框架;自动检测和加权306数字网格模型中的患者的roi内的解剖特征;自动检测和加权307患者配准模型中的患者的roi内的解剖特征;利用所检测到的数字网格模型和患者配准模型的解剖特征,自动配准308数字网格模型和患者配准模型;以及跟踪309外科手术器械相对于参考框架和患者配准模型的位置。在某些实施方案中,工作流程的步骤可由3d扫描设备110执行,其中在3d扫描设备110的屏幕111上显示各种图像。在其他实施方案中,工作流程的某些步骤可由3d扫描设备110执行,其中在屏幕111上显示各种相关图像,并且工作流程的其他步骤可由工作站140执行,其中在工作站140的监视器144的屏幕145上显示各种相关图像,如图1所示。
33.图5示出了由3d扫描设备110空间扫描的roi 150。在所示的实施方案中,用户可以在镜头112指向roi 150和光学参考框架120的情况下单手或双手握持3d扫描设备110,并且在任意方向上移动3d扫描设备110,这可有利于相机113捕获roi 150和光学参考框架120的空间数据点。例如,3d扫描设备110可以侧向地、竖直地、弧形地和/或圆周地移动。在另一实施方案中,3d扫描设备110可耦接到固定支架,以从单个有利位置或在预定位置范围内扫描roi 150和光学参考框架120。空间数据点可存储在存储设备115中。在另一实施方案中,空间数据点可经由无线通信设备116、143传输到工作站140,并存储在存储设备142中。由3d扫描设备110捕获的空间数据点的数量可在约10,000个至约100,000个或更多的范围内。空间数据点可作为roi 150和光学参考框架120的三维(3d)或二维(2d)160图像显示在屏幕111上。空间数据点不包含有关3d扫描设备110相对于roi和光学参考框架120的定位的任何信息。
34.如图56所示,在捕获和存储空间数据点之后,处理器114或141可根据空间数据点自动生成3d或2d数字网格模型161。数字网格模型161可包括roi网格模型162和参考框架网格模型163。数字网格模型161可显示在3d扫描设备110的屏幕111上。在其他实施方案中,处理器141可生成数字网格模型161并显示在耦接到工作站140的屏幕或监视器145上。
35.如图7所示,在生成数字网格模型161之后,处理器114或141可自动确定参考框架网格模型163在数字网格模型161内的位姿,并且识别参考框架网格模型163的特征。识别的
特征可包括反射器122a、臂构件123a和/或旋钮126a。考虑其他特征。处理器141可从存储设备142检索参考框架配准模型164,并且将参考框架配准模型164与参考框架网格模型163配准。该配准可通过将参考框架网格模型163的识别特征(例如,反射器122a、臂构件123a和旋钮126a)与参考框架配准模型164的对应特征(例如,反射器122b、臂构件123b和旋钮126b)对准来完成。配准模型163、164可显示在监视器144的屏幕145上,和/或配准模型163、164可显示在屏幕111上。在一些实施方案中,可利用任何合适的技术诸如计算机辅助设计(cad)来生成参考框架配准模型164。
36.如图78所示,处理器114或141可使用面部识别算法自动识别roi网格模型162的roi 150a的解剖特征。这些解剖特征可包括眼部151a、鼻部152a和前额153a。根据roi 150的定位考虑其他解剖特征,诸如嘴角、嘴部的其他部分、耳部、脸颊等。处理器141可从存储设备115或142检索患者配准模型165,并且使用面部识别算法识别患者配准模型165的roi 150b的解剖特征。例如,这些解剖特征可包括眼部151b、鼻部152b和前额153b。根据roi 150b的定位,考虑其他解剖特征,诸如耳部、嘴部、眉毛、下巴等。在某些实施方案中,患者配准模型165可以是根据任何合适的医学成像技术生成的roi 150b的3d或2d模型,这些医学成像技术诸如ct、mri、计算机断层扫描血管造影术(cta)、磁共振血管造影术(mra)、功能性磁共振成像(fmri)、正电子发射断层扫描(pet)、单光子发射计算机断层扫描(spect)、术中ct等。
37.在一些实施方案中,面部检测算法可对roi网格模型162和患者配准模型165的识别的解剖特征进行加权,以提高模型162、165的配准的精度。解剖特征的加权可基于解剖特征相对于roi的位置的可重复性水平。例如,某些解剖特征(例如,脸颊区域、下颌区域、后脑勺区域、耳部区域)的位姿在不同患者的位姿之间变化较大,并且因此这些特征的位姿更多取决于扫描时患者的位姿。相比于表现出较少可变性的解剖特征,面部识别算法可降低这些解剖特征的权重或以较少的重要性对其加权。在一些实施方案中,表现出较多可变性且被给予较少权重的解剖特征可称为“低权重解剖特征”。此外,其他解剖特征(例如,眼部周围的隆起、眉毛、前额区域、嘴部和/或鼻部)的位姿在不同患者的位姿之间变化较少,并且因此这些特征的位姿较少取决于扫描时患者的位置。在一些实施方案中,表现出较少可变性且被给予更多权重的解剖特征可称为“高权重解剖特征”。在某些实施方案中,可以从面部检测算法中删除低权重解剖特征的部分或全部,使得在配准过程中不会利用到它们。
38.如图9和图10所示,通过将roi网格模型162内的由面部检测算法检测到并加权的解剖特征150(例如,眼部151a、鼻部152a、前额153a)与患者配准模型165内的由面部检测算法检测到并加权的解剖特征(例如,眼部151b、鼻部152b、前额153b)对准,处理器114或141可将roi网格模型162与患者配准模型165自动配准。换句话讲,roi网格模型162的高权重解剖特征和患者配准模型165的对应高权重解剖特征可主要用于对准或配准roi网格模型162与患者配准模型165。在一些实施方案中,roi网格模型162和患者配准模型165的低权重解剖特征可用作辅助的对准或配准特征。图9描绘了roi网格模型162与患者配准模型165的部分配准。图10示出了roi网格模型162与患者配准模型165的完全配准,其中roi网格模型162的解剖特征(例如,眼部151a、鼻部152a、前额153a)与患者配准模型165的解剖特征(例如,眼部151b、鼻部152b、前额153b)对准。配准还会使得参考框架网格模型163相对于患者配准模型165配准,使得光学参考框架120相对于患者配准模型165的定位是已知的。
39.如图11所示,在数字网格模型161与患者配准模型165配准之后,可以使用光学导航设备146直观地跟踪外科手术器械170相对于光学参考框架120的位姿。外科手术器械170可作为外科手术器械模型170a显示在工作站140的监视器144的屏幕145上。
40.图12和图13描绘了外科手术配准系统200的实施方案,该外科手术配准系统在某些方面与上述非接触式患者配准系统100相似。因此,类似的特征用类似的附图标号来表示,其中前导数字递增至“2”。例如,图12和图13中描绘的实施方案包括在一些方面可类似于图1的光学参考框架120的参考框架220。因此,下文可能不再重复上文关于类似识别的特征的相关公开内容。此外,图1至图11中所示的光学参考框架120和相关部件的具体特征可能未在附图中用附图标号示出或识别,或者并未在随后的书面描述中予以具体讨论。然而,此类特征可能与其他实施方案中描绘的和/或关于这些实施方案描述的特征明显相同或基本上相同。因此,此类特征的相关描述同样适用于图12和图13中描绘的非接触式患者配准系统200和相关部件的特征。关于图1至图11中所示的非接触式患者配准系统100和相关部件描述的特征及其变型形式的任何合适组合可与图12和图13的非接触式患者配准系统200和相关部件一起使用,反之亦然。
41.图12描绘了非接触式患者配准系统200的另一实施方案。如图所示,非接触式配准系统200可包括参考框架220。参考框架220可耦接到患者并且设置在患者的roi 250内。参考框架220可包括em参考框架230。如图13所示,em参考框架230包括em跟踪器构件231和耦接到em跟踪器构件231的附件234。em跟踪器构件231可包括被配置为将em跟踪器构件231粘附到患者的粘合表面。电子连接器232经由缆线233耦接到em跟踪器构件231。电子连接器232可被配置为耦接到工作站240(未示出),以在em跟踪器构件231与工作站240之间传输电磁数据。
42.附件234可具有几何形状,诸如正方形或矩形形状。基座234的上表面可包括二维条形码235(例如,aruco标记)。在某些实施方案中,二维条形码235是qr码。进行光学扫描时,qr码可提供附件234的位姿的数字坐标。换句话讲,qr码可提供参考框架220的位姿。在一些实施方案中,附件234可以是彩色编码的。在某些实施方案中,附件234可包括被配置为选择性地耦接到em跟踪器构件231的适配器。该适配器可利用任何合适的技术耦接到em跟踪器构件231。
43.例如,适配器可经由卡扣配合、粘合、旋转接合和平移接合耦接。考虑其他耦接技术。在一些实施方案中,在数字网格模型与患者配准模型配准之后,可将附件234从em跟踪器构件231移除,以避免附件234干扰在外科手术程序期间使用的外科手术器械。
44.在使用中,处理器可通过利用qr码的坐标来确定参考框架220相对于数字网格模型的roi网格模型的位姿。通过确定qr码在roi网格模型的坐标系统内的位姿,可以将该qr码配准到roi网格模型。基于qr码的位姿,可以计算出roi网格模型内参考框架的位姿。roi网格模型可配准到配准模型。
45.本文所公开的任何方法包括用于执行所述方法的一个或多个步骤或动作。方法步骤和/或动作可以彼此互换。换句话讲,除非需要特定顺序的步骤或动作来正确地操作实施方案,否则可以修改特定步骤和/或动作的顺序和/或使用。例如,一种非接触式患者配准的方法,包括使用3d扫描设备对患者的感兴趣区域(roi)和参考框架进行空间扫描,以捕获空间数据点的集合;根据空间数据点的集合构建数字网格模型;确定参考框架在数字网格模
型内的定位和位置;检测数字网格模型的roi和患者配准模型的解剖特征;将数字网格模型的roi与患者配准模型进行配准,其中所检测到的数字网格模型的解剖特征与所检测到的患者配准模型的解剖特征对准。还考虑其他步骤。
46.对于一个或多个实施方案,在前述附图中的一个或多个前述附图中阐述的部件中的至少一个部件可被配置为执行如在下面的实施方案部分中阐述的一个或多个操作、技术、过程和/或方法。
47.实施例部分
48.以下实施例涉及其他实施方案。
49.实施例1.一种用于外科手术的非接触式患者配准的方法,包括:使用手持式3d扫描设备对患者的3d感兴趣区域(roi)和参考框架进行扫描,以获得3d扫描;根据该3d扫描构建roi和参考框架的数字网格模型;确定参考框架在数字网格模型内的位姿,以及将数字网格模型的roi与患者配准模型进行配准,其中数字网格模型的解剖特征与患者配准模型的解剖特征对准。
50.实施例2.根据实施例1所述的方法,还包括检测数字网格模型的roi以及患者配准模型的解剖特征。
51.实施例3.根据实施例1所述的方法,还包括经由光学或电磁设备跟踪器械相对于参考框架的位姿。
52.实施例4.根据实施例1所述的方法,其中数字网格模型包括:roi数字网格模型;和参考框架数字网格模型。
53.实施例5.根据实施例4所述的方法,该方法还包括:确定参考框架数字网格模型在数字网格模型内的位置;以及将参考框架配准模型与参考框架网格模型进行配准。
54.实施例6.根据实施例1所述的方法,其中参考框架包括在roi内耦接到患者的电磁(em)参考框架。
55.实施例7.根据实施例6所述的方法,其中em参考框架包括:em跟踪器构件;附件,该附件选择性地耦接到em跟踪器构件;和识别标签,该识别标签打印在附件的表面上。
56.实施例8.根据实施例7所述的方法,其中识别标签是二维条形码。
57.实施例9.根据实施例7所述的方法,其中附件是彩色编码的。
58.实施例10.根据实施例7所述的方法,其中识别标签包括快速响应码,该快速响应码被配置为提供二维条形码在数字网格模型内的坐标,以确定em跟踪器构件在数字网格模型内的位置。
59.实施例11.根据实施例1所述的方法,其中解剖特征包括以下中的任一者:鼻部区域、眼部区域、耳部区域、嘴部区域、面颊区域、眉毛区域、颌部区域以及它们的任意组合。
60.实施例12.根据实施例1所述的方法,还包括基于计算机断层扫描(ct)、磁共振图像(mri)、计算机断层扫描血管摄影(cta)、磁共振血管摄影(mra)和术中ct图像中的任一者创建患者配准模型。
61.实施例13.根据实施例1所述的方法,还包括经由无线通信技术将数字网格模型从3d扫描设备传送到工作站。
62.实施例14.根据实施例1所述的方法,其中3d扫描设备是手持式的,并且不跟踪该3d扫描设备的位姿。
63.实施例15.一种用于外科手术程序的非接触式患者配准的方法,包括:使用手持式3d扫描设备对患者的感兴趣区域(roi)和参考框架结构进行空间扫描,以捕获空间数据点的集合;根据空间数据点的集合构建数字网格模型,其中该数字网格模型包括:roi网格模型;和参考框架网格模型;检测数字网格模型内的参考框架网格模型;将参考框架网格模型与配准参考框架模型进行配准;检测roi网格模型和患者配准模型的解剖特征;以及利用所检测到的解剖特征将roi网格模型与患者配准模型进行配准,其中所检测到的roi网格模型的解剖特征与所检测到的患者配准模型的解剖特征对准。
64.实施例16.根据实施例15所述的方法,其中参考框架包括在roi内与患者相邻的光学参考框架结构。
65.实施例17.根据实施例16所述的方法,其中光学参考框架结构包括:主体;多个臂,这些多个臂从主体径向向外延伸;以及反射器,该反射器耦接到多个臂中的每个臂。
66.实施例18.根据实施例17所述的方法,其中光学参考框架结构还包括打印在附件的表面上的识别标签。
67.实施例19.根据实施例18所述的方法,其中识别标签是二维条形码。
68.实施例20.根据实施例18所述的方法,其中附件是彩色编码的。
69.实施例21.根据权利要求18所述的方法,其中识别标签包括快速响应码,该快速响应码被配置为提供二维条形码在数字网格模型内的坐标,以确定光学跟踪器构件在数字网格模型内的位置。
70.实施例22.根据实施例15所述的方法,其中解剖特征包括以下中的任一者:鼻部区域、眼部区域、耳部区域、嘴部区域、面颊区域、眉毛区域、颌部区域以及它们的任意组合。
71.实施例23.根据实施例15所述的方法,还包括基于计算机断层扫描(ct)、磁共振图像(mri)、计算机断层扫描血管摄影(cta)、磁共振血管摄影(mra)和术中ct图像中的任一者创建配准模型。
72.实施例24.根据实施例15所述的方法,还包括经由无线通信协议将数字网格模型从3d扫描设备传送到工作站。
73.实施例25.一种用于外科手术程序的非接触式患者配准的方法,包括:使用3d扫描设备对患者的感兴趣区域(roi)和电磁(em)参考框架结构进行空间扫描,以捕获空间数据点的集合;根据空间数据点的集合构建数字网格模型,其中数字网格模型包括roi网格模型;使用空间数据点确定em参考框架在数字网格模型内的位置;检测roi网格模型和患者配准模型的解剖特征;以及将roi网格模型与患者配准模型进行配准,其中所检测到的数字网格模型的解剖特征与所检测到的患者配准模型的解剖特征对准。
74.实施例26.根据实施例25所述的方法,其中em参考框架在roi内附接到患者。
75.实施例27.根据实施例25所述的方法,其中利用耦接到em参考框架的二维条形码的位置坐标来确定em参考框架在数字网格模型内的位置。
76.实施例28.根据实施例27所述的方法,其中二维条形码包括快速响应码。
77.实施例29.根据实施例25所述的方法,其中解剖特征包括以下中的任一者:鼻部区域、眼部区域、耳部区域、嘴部区域、面颊区域、眉毛区域、颌部区域以及它们的任意组合。
78.实施例30.根据实施例25所述的方法,还包括基于计算机断层扫描、磁共振图像、计算机断层扫描血管摄影、磁共振血管摄影和术中ct图像中的任一者创建配准模型。
79.实施例31.根据实施例25所述的方法,还包括经由无线通信技术将数字网格模型从3d扫描设备传送到工作站。
80.实施例32.一种外科手术非接触式患者图像配准系统,包括:非跟踪手持式3d扫描设备;参考框架,该参考框架在感兴趣区域内与患者相邻定位;和工作站;其中手持式3d扫描设备被配置为扫描roi和参考框架,并且工作站使用来自非跟踪3d扫描设备的扫描将roi与患者配准模型配准,并且确定参考框架的位置和位姿。
81.实施例33.根据实施例32所述的外科手术非接触式患者图像配准系统,其中3d扫描设备包括:相机,该相机被配置为捕获包括参考框架的roi的空间数据;屏幕,该屏幕被配置为显示空间数据;存储设备,该存储设备被配置为存储根据空间数据创建数字网格模型的指令;处理器,该处理器被配置为接收并执行存储设备的指令;和第一信号传达构件,该第一信号传达构件被配置为将数字网格模型传输到工作站。
82.实施例34.根据实施例32所述的外科手术非接触式患者图像配准系统,其中3d扫描设备是以下中的任一者:相机、具有集成相机的智能手机、具有集成相机的数字计算机平板和耦接到相机的膝上型计算机。
83.实施例35.根据实施例32所述的外科手术无接触式图像配准系统,其中3d扫描设备包括传感器,该传感器包括激光成像、检测和测距(激光雷达)传感器,结构光传感器、光学/红外波长传感器以及它们的任意组合中的任一者。
84.实施例36.根据实施例32所述的外科手术非接触式患者图像配准系统,其中3d扫描设备包括设备保持器,该设备保持器包括:框架,该框架被配置用于保持3d扫描设备;和手柄,该手柄被配置为由用户的手握持。
85.实施例37.根据实施例32所述的外科手术非接触式患者图像配准系统,其中参考框架是光学参考框架,并且包括以下结构,该结构包括:主体;多个臂,这些多个臂从主体径向向外延伸;和反射器,该反射器耦接到多个臂中的每个臂。
86.实施例38.根据实施例32所述的外科手术非接触式患者图像配准系统,其中参考框架包括电磁(em)参考框架。
87.实施例39.根据实施例38所述的外科手术非接触式患者图像配准系统,其中em参考框架包括:em跟踪器构件;基部,该基部耦接到em跟踪器构件;和识别标签,该识别标签打印在基部的表面上。
88.实施例40.根据实施例39所述的外科手术非接触式患者图像配准系统,其中二维识别码包括快速响应码。
89.实施例41.根据实施例32所述的外科手术非接触式患者图像配准系统,其中工作站包括:监视器,该监视器被配置为显示经处理的空间数据;存储构件,该存储构件被配置为存储指令,这些指令用于:识别数字网格模型和配准模型的解剖特征;识别参考框架;以及将数字网格模型与配准模型配准;和处理器,该处理器被配置为接收并执行存储构件的指令;和第二信号传达构件,该第二信号传达构件被配置为接收来自3d扫描设备的数字网格模型。
90.实施例42.根据实施例41所述的外科手术非接触式患者图像配准系统,其中根据计算机断层扫描、磁共振图像、计算机断层扫描血管造影、磁共振血管摄影和术中计算机断层扫描中的任一者生成配准扫描模型。
91.除非另外明确说明,否则上述实施例中的任一者可与任何其他实施例(或实施例的组合)组合。上文对一个或多个实施方式的描述提供了说明和描述,但并不旨是详尽的或将实施方案的范围限制于所公开的精确形式。根据上述教导内容,修改和变型是可能的,或者可从各种实施方案的实践中获得。
92.在整个说明书中对“实施方案”或“该实施方案”的引用意味着结合该实施方案描述的特定特征、结构或特性被包括在至少一个实施方案中。因此,在整个说明书中引用的短语或其变型形式不必都指相同的实施方案。
93.类似地,在以上对实施方案的描述中,出于简化本公开的目的,有时将各个特征在其单个实施方案、附图或描述中一起分组。然而,不应将本公开内容的方法解释为反映以下意图:任何权利要求需要比该权利要求中明确叙述的特征更多的特征。相反,如以下权利要求所反映的,创造性方面在于任何单个前述公开的实施方案的少于所有特征的组合。
94.应当理解,出于简化本公开的目的,有时将各种特征组合在单个实施方案、附图或其描述中。这些特征中的许多特征可单独使用和/或彼此组合地使用。
95.短语“耦接到”是指两个或更多个实体之间的任何形式的交互,包括机械、电、磁性、电磁、流体和热交互。两个部件可以彼此耦接,即使它们彼此不直接接触。例如,两个部件可以通过中间部件耦接到彼此。
96.诸如通过使用术语“约”来在整个说明书中提及近似值。对于每个此类提及,应理解,在一些实施方案中,可在没有近似值的情况下指定值、特征或特性。例如,在使用限定词“约”的情况下,该术语在其范围内包括缺乏其限定词的限定词语。
97.术语“一(a和an)”可被描述为一个(one),但不限于一个。例如,尽管本公开可列举具有“一个电极”的生成器,但本公开还考虑生成器可具有两个或更多个电极。
98.除非另有说明,所有范围均包括两个端值以及端值之间的所有数值。
99.本书面公开内容之后的权利要求书据此明确并入本书面公开内容中,其中每一权利要求独立地作为单独实施方案。本公开包括独立权利要求及其从属权利要求的所有排列。此外,能够从以下独立权利要求和从属权利要求衍生的附加的实施方案也明确并入本书面描述中。
100.无需进一步详尽阐述,据信本领域的技术人员可使用前述描述来最大限度地利用本发明。本文所公开的权利要求和实施方案应被解释为仅是例示性和示例性的,并且不是以任何方式对本公开的范围的限制。借助于本公开,本领域的普通技术人员将显而易见的是,在不脱离本文的公开内容的基本原理的情况下可对上述实施方案的细节作出改变。换句话讲,以上描述中具体公开的实施方案的各种修改和改进在所附权利要求书的范围内。此外,在不脱离本公开的范围的情况下,本领域的技术人员可改变本文所公开的方法的步骤或动作的顺序。换句话讲,除非实施方案的正确操作需要特定步骤或动作顺序,否则可修改特定步骤或动作的顺序或使用。因此,本发明的范围由以下权利要求和它们的等效物来定义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1