具有集成相机的外科套管针的制作方法
本技术大体上涉及用于微创医疗手术的外科机器人系统。
背景技术:
1、一些外科机器人系统包括支撑外科机器人臂的控制台和安装到机器人臂的外科器械或至少一个端部执行器(例如,夹钳或抓持工具)。机器人臂为外科器械提供机械动力以供其操作和移动。每个机器人臂可包括器械驱动单元,该器械驱动单元操作地连接到外科器械并且经由导轨联接到机器人臂。在操作中,将机器人臂移动到患者上方的位置,并且接着经由外科套管针或患者的自然孔口将外科器械引导到小切口中,以将端部执行器定位在患者体内的工作部位处。外科套管针可附接到外科机器人臂的端部并且在外科器械插入穿过其中期间保持在固定位置。
2、在外科器械插入和外科器械的使用期间在患者体内提供更好的可视化将是有利的。
技术实现思路
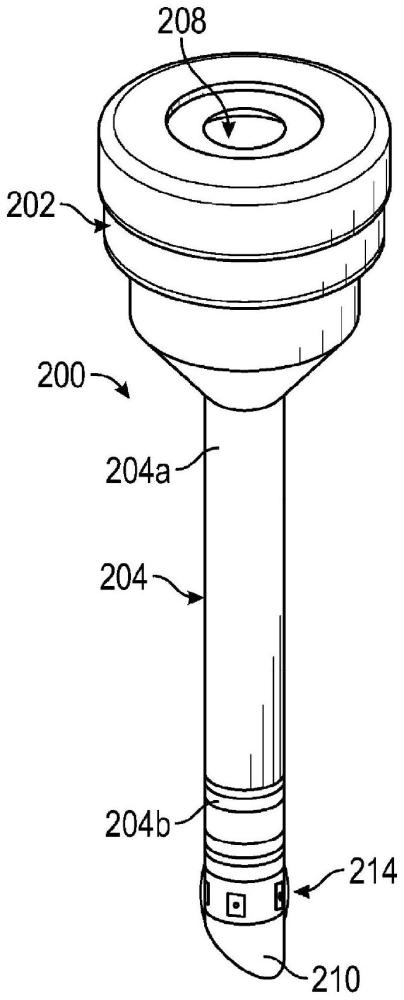
1、在本公开的一个方面中,提供一种外科机器人系统,并且该外科机器人系统包括机器人臂和第一套管针。外科机器人臂具有被配置成能够移动地支撑外科器械的细长导轨。该第一套管针包括:头部,该头部被配置成用于附接到细长导轨;插管,该插管从头部朝远侧延伸并且被配置成接收外科器械;和多个相机,该多个相机围绕插管的远端部分设置并且径向向外指向。
2、在各方面中,外科机器人系统还可包括视频处理设备和与视频处理设备通信的显示器。视频处理可与第一套管针的相机通信,并且可被配置成将由第一套管针的相机中的每个相机拍摄的图像缝合在一起以形成单个图像。显示器可被配置成显示单个图像。
3、在各方面中,相机可以环形阵列安装到插管的远端部分。
4、在各方面中,第一套管针可包括包围多个相机的透镜。
5、在各方面中,插管的远端部分可限定远侧端口,并且相机可邻近远侧端口设置。
6、在各方面中,第一套管针可包括邻近相机设置的灯。
7、在各方面中,外科机器人系统还可包括第二套管针,该第二套管针包括:插管,该插管限定穿过该插管的通道;和多个相机,该多个相机围绕第二套管针的插管的远端部分设置并且径向向外指向。
8、在各方面中,视频处理设备可被进一步配置成在将外科器械插入到第一套管针或第二套管针中的另一者内期间将第一套管针或第二套管针的相机聚焦在第一套管针或第二套管针中的另一者上。
9、在各方面中,外科机器人系统还可包括显示器以及与显示器和第一套管针的相机通信的视频处理设备。该视频处理设备可被配置成将由第一套管针的相机中的每个相机拍摄的图像缝合在一起以形成单个图像并且在显示器上显示单个图像。
10、根据本公开的另一方面,提供一种用于插入到体腔中的套管针,并且该套管针包括:头部,该头部限定被配置成用于接收外科器械的开口;插管,该插管从头部朝远侧延伸并且限定被配置成用于使外科器械通过的通道;和多个相机,该多个相机围绕插管的远端部分设置并且径向向外指向。
11、在各方面中,插管的远端部分可限定远侧端口,并且相机可邻近远侧端口安装到插管的远端部分。
12、在各方面中,插管可具有附接到头部的近端部分,并且插管的远端部分可具有被配置成用于穿透组织的远侧末端。
13、在各方面中,插管可包括包围多个相机的透镜。
14、根据本公开的另一方面,提供一种在外科手术期间使内部体腔成像的方法。该方法包括:缝合由围绕第一套管针的远端部分设置的多个相机捕获的图像以形成体腔的单个图像;以及在显示器上显示体腔的单个图像。
15、在各方面中,该方法还可包括:当将第二套管针插入到体腔中时,启动第一套管针的相机;以及/或者当将第二套管针插入到体腔中时,使第一套管针的相机指向第二套管针。
16、在各方面中,该方法还可包括:将由第一套管针的相机和第二套管针的多个相机拍摄的图像缝合在一起以形成体腔的3d图像;以及在显示器上显示3d图像。
17、在各方面中,该方法还可包括检测外科器械到体腔中的移动,由此第一套管针的多个相机和第二套管针的多个相机朝向外科器械定向。
18、在各方面中,该方法还可包括用安装到第一套管针的远端部分的多个led对体腔进行照明。
19、下文将参考附图更详细地描述本公开的示例性方面的另外细节和方面。
20、如本文所用,术语平行和垂直应理解为包括与真实平行和真实垂直相差高达约+或-10度的大体上平行和大体上垂直的相对配置。
技术特征:
1.一种外科机器人系统,所述外科机器人系统包括:
2.根据权利要求1所述的外科机器人系统,所述外科机器人系统还包括:
3.根据权利要求1所述的外科机器人系统,其中所述多个相机以环形阵列安装到所述插管的所述远端部分。
4.根据权利要求1所述的外科机器人系统,其中所述第一套管针包括包围所述多个相机的透镜。
5.根据权利要求1所述的外科机器人系统,其中所述插管的所述远端部分限定远侧端口,所述多个相机邻近所述远侧端口设置。
6.根据权利要求1所述的外科机器人系统,其中所述第一套管针包括邻近所述多个相机设置的至少一个灯。
7.根据权利要求1所述的外科机器人系统,所述外科机器人系统还包括第二套管针,所述第二套管针包括:
8.根据权利要求7所述的外科机器人系统,所述外科机器人系统还包括与所述第一套管针和所述第二套管针的所述多个相机通信的视频处理设备,其中所述视频处理设备被配置成将由所述第一套管针和所述第二套管针的所述多个相机中的每个相机拍摄的图像缝合在一起以形成单个图像并且在显示器上显示所述单个图像。
9.根据权利要求8所述的外科机器人系统,其中所述视频处理设备被进一步配置成在将所述外科器械插入到所述第一套管针或所述第二套管针中的另一者中期间将所述第一套管针或所述第二套管针的所述多个相机聚焦在所述第一套管针或所述第二套管针中的另一者上。
10.一种用于插入到体腔中的套管针,所述套管针包括:
11.根据权利要求10所述的套管针,其中所述多个相机以环形阵列安装到所述插管的所述远端部分。
12.根据权利要求11所述的套管针,其中所述插管包括包围所述多个相机的透镜。
13.根据权利要求10所述的套管针,其中所述插管的所述远端部分限定远侧端口,所述多个相机邻近所述远侧端口安装到所述插管的所述远端部分。
14.根据权利要求10所述的套管针,其中所述套管针包括邻近所述多个相机设置的至少一个灯。
15.根据权利要求10所述的套管针,其中所述插管具有附接到所述头部的近端部分,所述远端部分具有被配置成用于穿透组织的远侧末端。
16.一种在外科手术期间使内部体腔成像的方法,所述方法包括:
17.根据权利要求16所述的方法,所述方法还包括以下中的至少一者:
18.根据权利要求17所述的方法,所述方法还包括检测外科器械到所述体腔中的移动,由此所述第一套管针的所述多个相机和所述第二套管针的多个相机朝向所述外科器械定向。
19.根据权利要求17所述的方法,所述方法还包括:
20.根据权利要求16所述的方法,所述方法还包括用安装到所述第一套管针的所述远端部分的多个led对所述体腔进行照明。
技术总结
一种用于微创外科手术中的外科机器人系统包括套管针,该套管针用于促进外科器械进入体腔并捕捉该体腔的图像。
技术研发人员:威廉·J·派纳
受保护的技术使用者:柯惠LP公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!