骨隧道导向器及其制备方法和应用与流程
1.本发明涉及导向器的技术领域,特别涉及一种骨隧道导向器及其制备方法和应用。
背景技术:
2.在人体关节及其周围结构中,普遍存在着腱-骨结构,运动、外伤等损伤都可能会导致腱-骨连接处撕裂,造成疼痛、运动障碍等后果。腱-骨损伤修复一直是一个难题,对于这类问题的处理有多种固定方法:如带线锚钉固定技术;螺钉等金属内固定;经骨隧道缝合技术;还有使用肌腱进行韧带解剖重建等,而简单、牢靠的固定是较为棘手的问题。带线锚钉价格昂贵,且在骨质疏松时并不宜应用。螺钉等金属内固定有置入金属异物,有异物反应、二次取出的可能。韧带重建手术修复整个手术工程量大,损伤大。而经骨隧道缝合技术价格便宜,在某些特定结构中有其独特的作用,在骨隧道的制作过程中,一次性操作完成的要求比较高,不然有可能会形成假道,如果偏离原先预定的轨道,甚至会损伤周围重要的神经血管。形成假道还有可能损伤骨质,造成有效固定的骨质减少,影响经骨隧道固定的强度。故骨隧道相关导向器一直在向安全、精确、快速的方向发展。在临床中进行腱-骨缝合时,最简单也最原始就是直接徒手用克氏针或钻头钻孔,将缝线穿过骨隧道进行缝合固定。之后改进钻孔方法,用导向器辅助打孔,还可以结合相关导航系统辅助骨隧道定位。徒手钻取骨隧道有一定难度,出口会有一定的随意性,容易偏离预定方向和深度,重复性差,不确定性多。结合相关导航系统建立骨隧道固然精确,但是导航系统价格昂贵、操作复杂,对医院设备、人员技能操作水平的要求非常高,没有导航设备的基层医院是比较多的。为解决这些问题,拟研制一种结构、设计制作简单、经济的骨隧道导向器。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,提供一种骨隧道导向器及其制备方法和应用。
4.为实现上述目的,本发明采取的技术方案为:
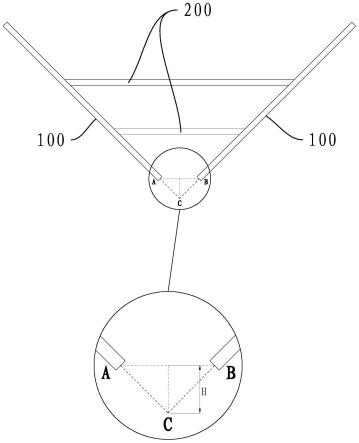
5.一种骨隧道导向器,包括侧导管、连接管,所述侧导管内置入克氏针,所述侧导管采用两根,两根所述侧导管间通过所述连接管连接;
6.第一根所述侧导管的前端为a,第二根所述侧导管的前端为b,两根所述侧导管的延长线交于c,a、b、c间的连线构成等腰三角形,等腰三角形的高为h,其中a与b的连线长为1cm,h为5.0mm,∠acb=90
°
。
7.根据本发明的一些实施例,还包括限位管,所述限位管焊接于克氏针上,所述限位管用于限制克氏针从所述侧导管的前端伸出的长度。
8.根据本发明的一些实施例,所述侧导管的直径为0.3mm,长度为45mm。
9.根据本发明的一些实施例,所述连接管采用两根,两根所述连接管平行连接于两根所述侧导管的三等分点之间。
10.根据本发明的一些实施例,第一根所述连接管的直径为0.3mm,长度为90.0mm;第二根所述连接管的直径为0.3mm,长度为45.0mm。
11.根据本发明的一些实施例,所述侧导管与所述连接管均采用不锈钢管。
12.本发明提供一种骨隧道导向器的制备方法,包括以下步骤:
13.将两根三等分的不锈钢管置于同一平面作为导向器的两个侧导管,在三等分处用连接管进行连接,得到锈钢支架;
14.将上述锈钢支架的一端延长,相交于一点,得到骨髓导向器;第一根所述侧导管的前端为a,第二根所述侧导管的前端为b,两根所述侧导管的延长线交于c,a、b、c间的连线构成等腰三角形,等腰三角形的高为h,其中a与b的连线长为1cm,h为5.0mm,∠acb=90
°
。
15.根据本发明的一些实施例,所述连接管为两根,第一根所述连接管的直径为0.3mm,长度为90.0mm;第二根所述连接管的直径为0.3mm,长度为45.0mm。
16.本发明还提供骨隧道导向器的使用方法,包括以下步骤:
17.(1)将膝关节用铁钉固定于木板上,分离出内侧副韧带浅层,并用骨凿分离内侧副韧带浅层胫骨止点,模拟内侧副韧带胫骨止点撕裂;
18.(2)将撕裂处骨面粗糙化,骨隧道导向器的两侧导管管口在内侧副韧带浅层胫骨止点处沿着胫骨纵轴走向放置,垂直于骨面,用克氏针从骨隧道导向器侧导管钻孔,钻到克氏针限位器处时回退5.0mm;
19.(3)从所述骨隧道导向器另一侧导管钻孔,钻到克氏针限位器处后将两枚克氏针依次全部退出;
20.(4)用线钩疏通所打隧道,一侧插入线钩,另一侧用线钩向各个方向搅动,将对折的pds引线推进到骨隧道底部;
21.(5)用线钩将pds引线从另一边勾出骨隧道,随后将聚酯不可吸收缝线带进穿出骨隧道,将缝线打两个结。
22.根据本发明的一些实施例,步骤(4)中,观察对侧线钩是否被搅动,如未被搅动,则说明两侧骨隧道未交汇,需要调整克氏针钻孔的方向和深度;如被搅动,说明两侧骨隧道已经交汇。
23.本发明还提供一种修复膝关节损伤装置,包括所述的骨隧道导向器。
24.与现有技术相比,本发明的有益效果为:
25.骨隧道导向器在使用时,将侧导管的前端紧贴于骨面,电钻克氏针置入侧导管内,并钻孔穿入即可在骨内建立骨隧道,提高骨隧道制作的成功率,避免因钻孔失败造成的损伤,增加了患者的经济负担。
26.本发明的骨隧道导向器,呈缺角型结构,通过动物实验对比,骨隧道导向器具有制作骨隧道时间少,精准度高,提高骨隧道质量等优点。同时,降低了医师制作骨隧道的学习曲线。可在临床上用于修复膝关节内侧副韧带腱-骨损伤。
附图说明
27.图1为本发明实施例的整体示意图;
28.图2为本发明实施例的使用状态示意图;
29.图3为本发明实施例中两组对比实验在不同手术序号的完成时间学习曲线图。
具体实施方式
30.为更好的说明本发明的目的、技术方案和优点,下面将结合具体实施例和附图对本发明作进一步的说明。
31.实施例1
32.参照图1,一种骨隧道导向器,包括侧导管100、连接管200,侧导管100采用两根,侧导管100内置入克氏针,两根侧导管100间通过连接管200连接;第一根侧导管100的前端为a,第二根侧导管100的前端为b,两根侧导管100的延长线交于c,a、b、c间的连线构成等腰三角形,等腰三角形的高为h;在胫骨内髁内侧副韧带止点处,沿胫骨纵轴钻2个骨孔,两孔间距应大于5mm,否则易断裂,深约5mm,恰好在骨皮质下,因此其中a与b的连线长为1cm,h为5.0mm,∠acb=90
°
。
33.在骨隧道导向器在使用时,将侧导管100的前端紧贴于骨面,电钻克氏针置入侧导管100内,并钻孔穿入即可在骨内建立骨隧道,提高骨隧道制作的成功率,避免因钻孔失败造成的损伤,增加了患者的经济负担。
34.参照图2所示,还包括限位管300,限位管300焊接于克氏针上,限位管300用于限制克氏针从侧导管100的前端伸出的长度。
35.在制作限位管300时,分别向侧导管100内置入克氏针,调整克氏针置入长度,使右侧克氏针尖头刚好超出与左侧克氏针交叉处,然后在导向器右侧导管100尾端处用限位管300套进克氏针并焊接,同理标记焊接左侧的克氏针,可使其配合导向器辅助钻孔时限制克氏针的钻入长度,起到限制位置的作用。
36.在本实施例中,限位管300的长度为10.0mm,直径为0.3mm。
37.在本实施例中,侧导管100的直径为0.3mm,长度为45mm。
38.在本实施例中,连接管200采用两根,两根连接管200平行连接于两根侧导管100的三等分点之间。
39.第一根连接管200的直径为0.3mm,长度为90.0mm;第二根连接管200的直径为0.3mm,长度为45.0mm。
40.在本实施例中,侧导管100与连接管200均采用不锈钢管,也可使用强度高,容易和耐受消毒的材料。
41.本骨隧道导向器在膝关节内侧副韧带浅层胫骨止点处的使用方法:
42.首先将膝关节分离出内侧副韧带浅层,将本骨隧道导向器的两管口在原内侧副韧带浅层胫骨止点处沿着胫骨纵轴走向放置,垂直于骨面,将第一根克氏针从一侧的侧导管100置入并钻孔,钻到第一根克氏针的限位管300处时回退5.0mm,然后将第二根克氏针从另一侧的侧导管100置入并钻孔,钻到第二根克氏针的限位管300处后将两枚克氏针依次全部退出。
43.用线钩疏通所打隧道,一侧插入线钩,另一侧用线钩向各个方向搅动,观察对侧线钩是否被搅动,如未被搅动,则说明两侧骨隧道未交汇,需要调整克氏针钻孔的方向和深度。如被搅动,说明两侧骨隧道已经交汇,将对折的pds引线推进到骨隧道底部。用线钩将pds引线从另一边勾出骨隧道,随后将2号聚酯不可吸收缝线带进穿出骨隧道,徒手将2号聚酯不可吸收缝线打两个结。
44.本施例提供的骨隧道导向器的制备方法,包括以下步骤:
45.将两根三等分的不锈钢管置于同一平面作为导向器的两个侧导管,在三等分处分别用一根2.5mm
×
90.0mm
×
0.3mm不锈钢管、一根2.5mm
×
45.0mm
×
0.3mm不锈钢管平行连接,得到锈钢支架;
46.将锈钢支架的一端延长,相交于一点,得到骨髓导向器,在侧导管中标记克氏针、焊接限制套管制作克氏针限位器;第一根侧导管的前端为a,第二根侧导管的前端为b,两根侧导管的延长线交于c,a、b、c间的连线构成等腰三角形,等腰三角形的高为h,其中a与b的连线长为1cm,h为5.0mm,∠acb=90
°
。
47.对比实验
48.选用猪膝关节,采用随机数字表法分为骨隧道导向器组和传统徒手组,骨隧道导向器组采用骨隧道导向器辅助制作骨隧道,传统徒手组通过徒手使用电钻和克氏针钻孔制作骨隧道。对比两组的完成时间、准确性、假道率,还有两组的学习曲线、观察指标间潜在的相关性。
49.两组完成的时间
50.导向器组的完成时间明显快于徒手组,一个是建立骨隧道的过程中骨隧导向器可以辅助固定克氏针的角度,使其两边隧道顺利交汇。且使用骨隧导向器制作的骨隧道更平滑、规则、圆润。徒手克氏针制作骨隧道,由于不好把握克氏针的方向,故有可能不好一次性完成钻孔,可因为调整方向损伤骨质,甚至造成假道,使整个骨隧道变形,故穿过缝线的时候必定受到一定影响,增大穿过缝线的难度以及时间。
51.骨隧道质量
52.徒手用克氏针制作骨隧道,由于不好把握克氏针的方向、深度,故很容易偏离既定轨迹,很容易一次性完成不了钻孔,可因为调整克氏针的方向、深度等损伤骨质,造成假道,使整个骨隧道粗糙、不规则。损伤骨质之后,整个有效固定的骨质势必减少,故影响骨隧道的质量。而使用导向器制作的骨隧道在导向器辅助下,方向更好把握,制作出来的骨隧道更平滑、规则、圆润,损伤的骨质少,整个有效固定的骨质势必损失较少,故骨隧道质量与徒手组相比会更加好。
53.两组的学习曲线
54.骨隧道导向器组的完成时间学习曲线较传统徒手组低平,两组随实验例数的增加而呈下降趋势,但徒手组波动较大。故骨隧道导向器很大程度上帮助他们按着正确的方向钻孔,极大提高了钻孔效率以及准确性。两组学习曲线都随实验例数的增加而呈下降趋势,说明实验操作是可以“熟能生巧”的,不过徒手组较导向器组波动大,说明徒手钻孔有较多不确定性,导向器稳定而效率较高。
55.两组完成时间、深度差绝对值d、假道个数指标之间潜在相关性
56.骨隧导向器组完成时间和深度差绝对值d呈显著相关(r=0.950,p=0.000):深度差绝对值d是衡量钻孔准确度的一个指标,当钻孔深度或方向不准确的时候,两侧的骨隧道很难成功交汇,需要不断调整钻孔的方向直至两侧骨隧道交汇,而这必然增加时间。完成时间和假道个数显著相关(r=0.651,p=0.001):当假道个数多的时候,说明钻孔时候的方向或者深度不合适,调整钻孔方向或者深度后形成假道,假道个数越多耗费时间越多。深度差绝对值d和假道个数显著相关(r=0.696,p=0.000):当深度差绝对值d不为0或者有假道形成的时候,说明钻孔深度或方向是不准确的。当需要调整钻孔深度或方向的时候会形成假
道,深度差绝对值d越大可能需要调整钻孔深度或方向的次数越多,调整钻孔深度或方向的次数越多假道形成越多。
57.徒手组中完成时间和深度差绝对值d呈无显著相关(r=0.314,p=0.135):在徒手钻孔过程中,凭自己的感觉和经验完成钻孔,只要两侧骨隧道成功交汇就可,因无法直视骨隧道,无法得知骨隧道深度,也无法得知是否需要调整钻孔方向或者深度,故完成时间和深度差绝对值d关系不大。完成时间和假道个数显著相关(r=0.446,p=0.029):当两侧骨隧道未成功交汇或者感觉钻孔方向、深度不正确时,这时候需要调整钻孔深度或方向,这会形成假道,调整钻孔深度或方向的次数越多假道形成越多,需要的时间越多,可通过减少假道个数来减少完成时间。深度差绝对值d和假道个数无显著相关(r=0.242,p=0.254):在徒手钻孔过程中,因无法直视骨隧道,且靠经验、感觉估计深度容易出现误差,无法得知骨隧道具体深度,不知道是否需要调整钻孔方向或者深度,故深度差绝对值d和假道个数关系不大。
58.结果
59.两组完成时间、深度差绝对值对比
60.骨隧导向器组完成时间为258.3
±
50.1s,徒手组完成时间523.7
±
86.6s,t=-12.996,p=0.000,差异有统计学意义。骨隧导向器组深度差绝对值d=0.5
±
0.2mm,徒手组深度差绝对值d=2.5
±
0.4mm,t=-21.403,p=0.000,差异有统计学意义,如表1所示。
61.表1两组完成时间、深度差绝对值d对比
62.组别完成时间(s)深度差绝对值d(mm)导向器组258.3
±
50.10.5
±
0.2徒手组523.7
±
86.62.5
±
0.4t-12.996-21.403p0.0000.000
63.注:p《0.05表示有统计学差异。
64.两组假道率对比
65.骨隧导向器组有假道例数为5例,无假道例数为19例,假道率为20.8%。徒手组有假道例数为18例,无假道例数为6例,假道率为75.0%。χ2=14.11,p=0.000,差异有统计学意义。如表2所示。
66.表2两组假道率对比
[0067][0068][0069]
注:p《0.05表示有统计学差异。
[0070]
两组在不同手术序号(实验例数编号)的完成时间学习曲线比较,如下图3所示,可
以看出导向器组完成的时间远小于徒手组。
[0071]
两组完成时间、深度差绝对值d、假道个数指标之间潜在相关性分析。
[0072]
结果提示骨隧导向器组中:完成时间和深度差绝对值d呈显著相关(r=0.950,p=0.000);完成时间和假道个数显著相关(r=0.651,p=0.001);深度差绝对值d和假道个数显著相关(r=0.696,p=0.000)。徒手组中:完成时间和深度差绝对值d呈无显著相关(r=0.314,p=0.135);完成时间和假道个数显著相关(r=0.446,p=0.029);深度差绝对值d和假道个数无显著相关(r=0.242,p=0.254)。如表3、表4所示。
[0073]
表3骨隧导向器组pearson相关性
[0074] 完成时间深度差绝对值d假道个数完成时间1
ꢀꢀ
深度差绝对值d0.950**1 假道个数0.651**0.696**1
[0075]
**.p《0.05(双尾),相关性显著。
[0076]
表4徒手组pearson相关性
[0077][0078]
**.p《0.05(双尾),相关性显著。
[0079]
最后所应当说明的是,以上实施例用以说明本发明的技术方案而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者同等替换,而不脱离本发明技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1