两自由度气囊下肢康复机器人的制作方法
本发明涉及下肢康复,具体涉及一种两自由度气囊下肢康复机器人。
背景技术:
1、踝关节损伤会对患者造成运动障碍,严重影响到患者的正常生活,让患者及家属感到困扰。
2、为此中国专利发明专利申请公布号cn111956448a公开了一种下肢康复机器人的动觉控制方法,本方法包括:s1:判断当前脊髓损伤患者的状态是否为预设早期康复状态;s2:若当前脊髓损伤患者的状态为预设早期康复状态,则按照预设被动训练方案对下肢康复机器人进行运动反解,并按照运动反解后对应的被动训练流程驱动下肢康复机器人带动脊髓损伤患者运动;s3:若当前脊髓损伤患者的状态不为预设早期康复状态,则按照预设主动训练方案对下肢康复机器人进行运动正解,并按照运动正解后对应的主动训练流程驱动下肢康复机器人带动脊髓损伤患者运动。
3、中国专利发明专利申请公布号cn102716000a公开了一种坐卧式下肢康复机器人及相应的助力训练控制方法。所述机器人包括座椅、机械臂、人机交互界面、主工控箱、电刺激手握开关、电刺激电极片、功能性电刺激工控箱和功能性电刺激仪。在辅助患者进行助力训练时,根据临床需求,设定机器人末端运动轨迹,主工控箱中的主机通过逆向运动学求解各关节运动轨迹,通过相应的运动控制卡、关节驱动器、电机/编码器,控制机械臂带动患者双侧下肢进行康复训练,同时,还对患者下肢的主要肌群施加电刺激脉冲,并根据末端的运动轨迹对电刺激脉冲进行时序控制,完成助力训练。
4、中国专利发明专利申请公布号cn102727361a公开的一种坐卧式下肢康复机器人,可以根据患者的损伤程度或康复阶段分别进行被动训练、助力训练或主动训练。所述机器人包括座椅、机械臂、主工控箱、人机交互界面、电刺激手握开关、电刺激电极片、肌电信号采集电极片、功能性电刺激和肌电信号采集工控箱。被动训练时,患者下肢按照设定运动轨迹进行训练;助力训练时,对患者下肢的主要肌群施加电刺激脉冲,根据末端的运动轨迹对电刺激脉冲进行时序控制,完成助力训练;主动训练时,采集患者相应肌肉的肌电信号,根据不同的控制算法实现由患者带动机器人的主动训练。
5、中国实用新型授权公告号cn216455934u公开的一种多功能踝泵应力训练器,针对现有的技术产品相对单一,无法直接融合多功能,运动模式中运动速度与时间相对固定,且足踝充气挤压强度与时间相对固定,无法根据患者实际需求,进行适配性调节,无法对脚底产生应力刺激,设备较为笨重携带不方便,难以家庭使用的问题,现提出如下方案,其包括底座,所述底座的顶部固定连接有连接座,且底座上设置有限位环。
6、中国专利发明专利申请公布号cn104492033a公开的一种基于semg的单关节主动训练控制方法及相应的康复机器人,该单关节主动训练控制方法用于具有semg采集系统的康复机器人中,包括利用semg采集系统采集患者的semg信号,然后康复机器人利用所述semg信号转换为单关节主动训练控制信号,对患者的单关节主动训练进行控制。本发明方法包含两个策略,即阻尼式和弹簧式主动训练,前者利用semg控制关节运动速度;后者利用semg控制关节角位移。
7、中国专利发明专利申请公布号cn113520792a公开的一种基于肌电信号的用于辅助足下垂患者进行康复训练的机器人,其包括助行机构、传感模块和靴子。助行机构主要包括执行器主体板、脚部连接件以及驱动装置,执行器主体板借助于第一连接轴与脚部连接件的后端部进行连接。传感模块包括肌电传感器及其安装底板。利用靴子将助行机构进行支撑并装饰,达到美化效果。在控制上,基于人体大腿、小腿之间肌电信号的规律来预测患者的运动意图,通过患者大腿前侧肌电信号值,识别出人体进行背屈或者跖屈运动所需达到的位姿,控制机器人辅助患者完成预定动作的训练,实现足下垂康复训练。
8、上述下肢康复机器人存在结构复杂,成本高的问题
技术实现思路
1、本发明的目的在于针对现有下肢康复机器人存在的结构复杂、成本高的问题而提供一种结构简单、成本低的两自由度气囊下肢康复机器人。
2、为了实现本发明的目的,所采用的技术方案是:
3、一种两自由度气囊下肢康复机器人,包括:一两自由度机械模块与一小腿气囊模块,所述两自由度机械模块与小腿气囊模块连接,所述小腿气囊模块对下肢进行按摩,所述两自由度机械模块对下肢进行屈伸和翻转训练。
4、在本发明的一个优选实施例中,所述小腿气囊模块包括气囊外壁和设置在气囊外壁内表面的内部气囊,所述内部气囊的充放气通过内置于所述气囊外壁内的内置系统控制;所述内部气囊通过充放气对下肢进行按摩。
5、在本发明的一个优选实施例中,所述内置系统包括气泵和气泵控制装置,所述气泵控制装置控制气泵启闭,所述气泵控制内部气囊的充放气。
6、在本发明的一个优选实施例中,在所述内部气囊的表面设置有安装电极片,所述电极片为患者提供低频电刺激。
7、在本发明的一个优选实施例中,所述内部气囊从远心端往近心端按顺序充气到固定的压力后,从远心端往近心端按顺序放气,形成阶梯式递进压力变化,并且有规律地重复这个过程。
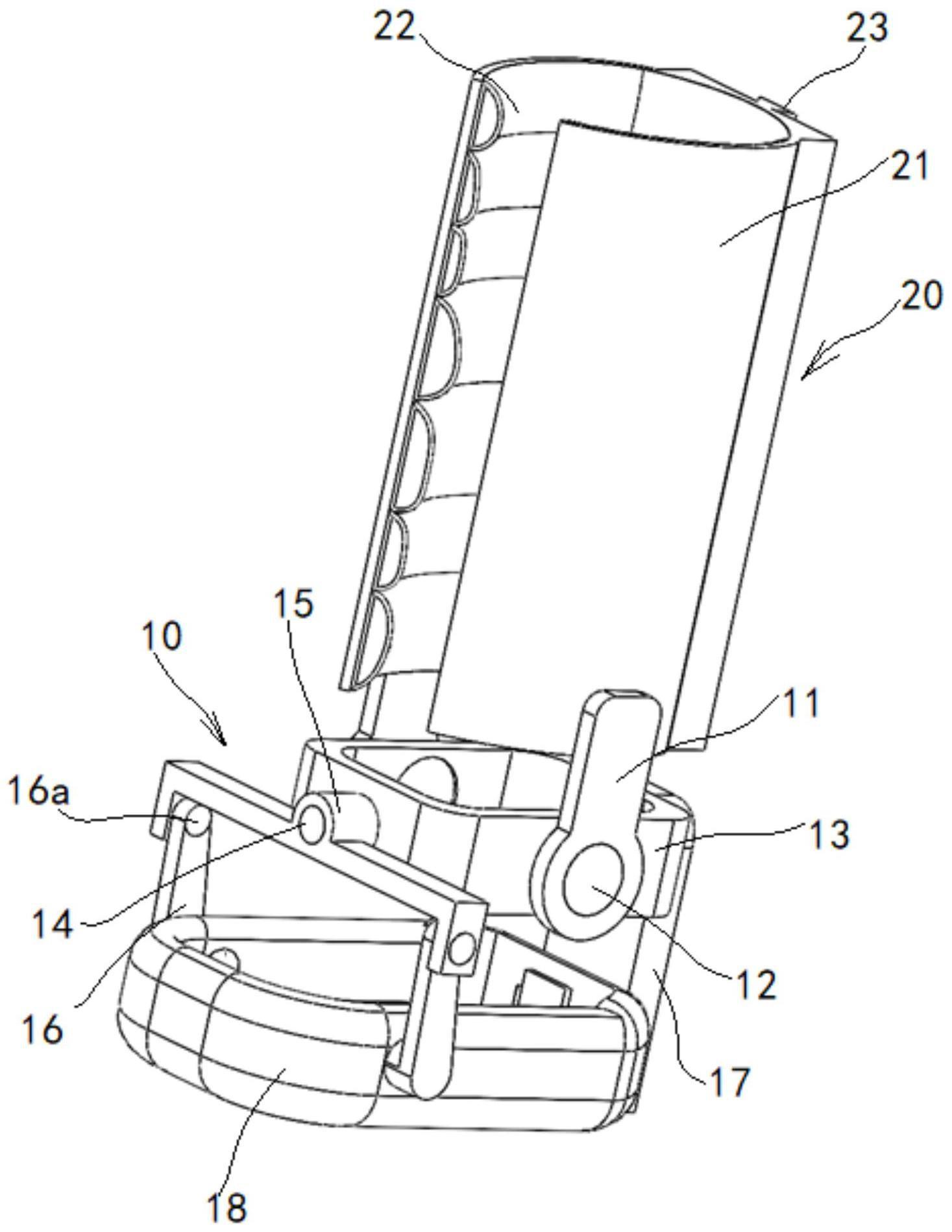
8、在本发明的一个优选实施例中,所述两自由度机械模块包括:
9、一端与所述气囊外壁连接的连接支架;
10、安装在所述连接支架另一端上的屈伸马达;
11、与所述屈伸马达驱动端连接的副框架;
12、安装在所述副框架上的翻转马达;
13、安装在所述翻转马达的传动轴上的双向扩展块;
14、一端与所述双向扩展块铰接的连接杆;
15、一端与所述副框架铰接的翻转带板;
16、一脚底板,所述脚底板的一侧与所述翻转带板的固定连接,所述脚底板的另一侧与所述连接杆的另一端铰接。
17、在本发明的一个优选实施例例中,在所述双向扩展块设置有一内腔,所述翻转马达设置于所述双向扩展块的内腔中,所述翻转马达的传动轴穿过所述双向扩展块并沿所述双向扩展块的轴向设置,所述翻转马达的传动轴驱动所述双向扩展块运动。
18、在本发明的一个优选实施例中,在每一个连接支架一端的内侧设置有魔术贴,每一个连接支架的内侧通过魔术贴紧密贴合于气囊外壁上。
19、在本发明的一个优选实施例中,在所述脚底板上设置有若干透气孔。
20、在本发明的一个优选实施例中,在所述气囊外壁上集成有一嵌入滑块,整个两自由度气囊下肢康复机器人通过该嵌入滑块嵌入到康复设备上。
21、由于采用了如上的技术方案,根据对踝关节康复训练方式的研究,基于主动运动和被动运动相关的现代康复理论,在帮助踝关节损伤患者模拟踝关节自然运动的同时,结合传统的中医理疗理论,安装电极片为患者提供低频电刺激,刺激患者的肌肉神经,加快新陈代谢。预防下肢深静脉血栓形成,气囊按摩功能可以帮助小腿腓肠肌收缩,促进静脉血液的回流。本发明设计的下肢关节康复器可以从多个方面为患者提供康复治疗,减轻患者的痛苦,提高患者生活质量,减轻护理负担,降低医疗费用开支,节约医疗资源。本发明的有益效果在于:
22、1.模拟康复医师的动作,代替人工进行更高效的周期性康复训练
23、2.脚踏板的长度设计为280mm,宽度为120mm,采用8mm厚的铝合金板保证脚踏板的承载力,同时设计了15个半径为8mm的圆形小孔,起到透气作用,同时,减轻下肢关节康复器的总体重量。
24、3.内部气囊从远心端往近心端按顺序充气到固定的压力后,从远心端往近心端按顺序放气,形成阶梯式递进压力变化,并且有规律地重复这个过程,帮助小腿腓肠肌收缩,使血液流回心脏,预防凝血因子黏附聚集,促进淋巴系统的循环,有效地预防下肢血管内形成血栓,防止患者下肢水肿。
25、4.可以采用阻尼传感器、角度传感器,在训练中实时检测机器人的运动情况,通过单片机实时记录并计算所测量的数据,实时调整训练水平。
- 还没有人留言评论。精彩留言会获得点赞!