支气管镜移动控制方法、系统及介质与流程
本技术属于医疗器械,具体涉及一种支气管镜移动控制方法、系统及介质。
背景技术:
1、支气管机器人作为辅助医生进行肺结节病症治疗的工具,其相关的自动化控制也越来越受到重视,通常,在手术中,支气管机器人上设置的支气管镜需要医生基于实时的术中导航图像,通过手柄不断调整支气管镜头部的控制点,以逐步前进直到将支气管镜送至病灶点附近。
2、然而,这种手动的支气管镜移动控制方法不仅需要医生具备丰富的经验、充足的精力,而且需要医生具备进行精细操控的能力,人为的因素影响较大,不仅耗时长,移动效率也极低。
技术实现思路
1、基于此,有必要针对上述背景技术中的问题,提供一种能够提高移动精度、减少移动耗时的支气管镜移动控制方法、系统及介质。
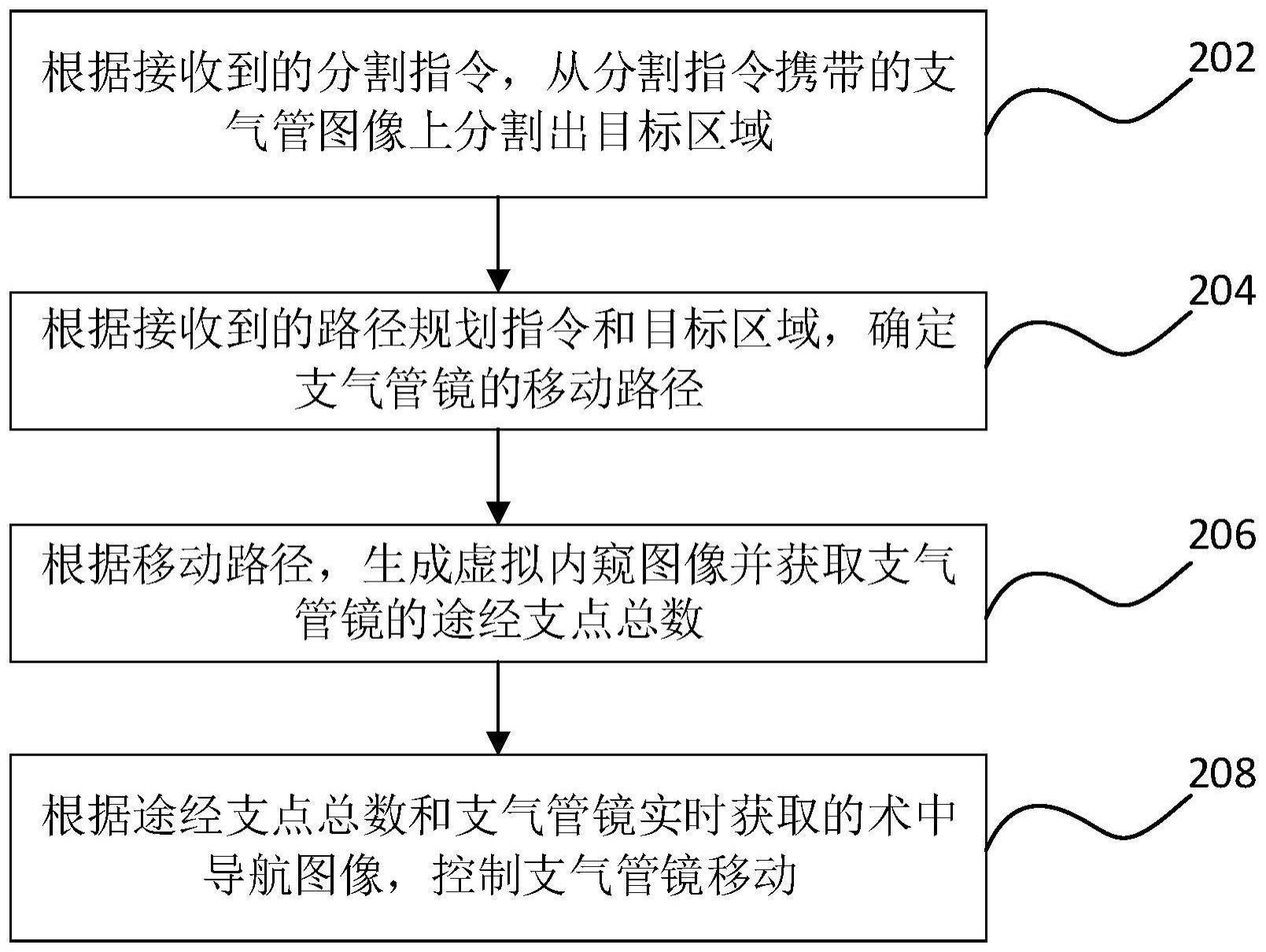
2、本技术的第一方面提供一种支气管镜移动控制方法,包括:
3、根据接收到的分割指令,从所述分割指令携带的待处理躯干图像上分割出目标区域;
4、根据接收到的路径规划指令和所述目标区域,确定支气管镜的移动路径;
5、根据所述移动路径,生成虚拟内窥图像并获取所述支气管镜的途经支点总数;
6、根据所述途经支点总数和所述支气管镜实时获取的术中导航图像,控制所述支气管镜移动。
7、在其中一个实施例中,所述待处理躯干图像预先设置有第一坐标系;所述路径规划指令包括路径起点在所述第一坐标系上的坐标信息和路径终点在所述第一坐标系上的坐标信息;所述路径起点和所述路径终点位于所述支气管中心线上;
8、所述根据接收到的路径规划指令和所述目标区域,确定支气管镜的移动路径,包括:
9、根据所述目标区域,确定支气管中心线;
10、将所述支气管中心线中连接所述路径起点和所述路径终点的路径作为所述移动路径。
11、在其中一个实施例中,所述根据所述途经支点总数和所述支气管镜实时获取的术中导航图像,控制所述支气管镜移动,包括:
12、将所述术中导航图像输入预先训练的方向调整模型,得到所述支气管镜的方向调整参数;
13、根据所述方向调整参数,控制所述支气管镜的头部转动;
14、在所述头部转动完毕后,控制所述头部向着转动后的方向移动预设距离,直到所述头部与所述路径终点的距离小于第一预设距离阈值。
15、在其中一个实施例中,所述方向调整模型包括第一子模型和第二子模型;
16、所述将所述术中导航图像输入预先训练的方向调整模型,得到所述支气管镜的方向调整参数,包括:
17、获取所述术中导航图像包含的洞口总数;
18、当所述洞口总数为一个时,将所述术中导航图像输入所述第一子模型,得到所述方向调整参数;
19、当所述洞口总数为至少两个时,将所述术中导航图像和所述虚拟内窥图像输入所述第二子模型,得到所述方向调整参数。
20、在其中一个实施例中,所述获取所述术中导航图像包含的洞口总数,包括:
21、获取所述术中导航图像各个像素点的灰度值;
22、筛选出灰度值小于预设灰度阈值的目标像素点;
23、遍历所述目标像素点,连接两两之间距离小于第二预设距离阈值的目标像素点;
24、将存在连接关系的多个目标像素点连通,得到连通区块;
25、当存在一个所述连通区块时,确定所述洞口总数为一个;
26、当存在两个及以上所述连通区块时,确定所述洞口总数为至少两个。
27、在其中一个实施例中,所述根据所述方向调整参数,控制所述支气管镜的头部转动,包括:
28、根据所述方向调整参数,确定所述支气管镜的调整力矩;
29、根据所述调整力矩,控制所述支气管镜的头部转动。
30、在其中一个实施例中,所述支气管镜预先设置有第二坐标系;
31、所述方法还包括:
32、根据各个所述目标分支点在所述第一坐标系及所述第二坐标系中的坐标信息,确定所述第一坐标系和所述第二坐标系的配准映射关系;
33、所述根据所述方向调整参数,确定所述支气管镜的调整力矩,包括:
34、根据所述第一坐标系中的方向调整参数,以及所述第一坐标系和所述第二坐标系的配准映射关系,确定所述第二坐标系中的方向调整参数;
35、根据所述第二坐标系中的方向调整参数,从预先存储的多个方向调整参数和多个调整力矩的映射关系中,匹配到对应的调整力矩。
36、在其中一个实施例中,所述方法还包括:
37、获取所述支气管镜途经的目标分支点的数量;
38、所述控制所述头部向着转动后的方向移动预设距离,直到所述头部与所述路径终点的距离小于第一预设距离阈值,包括:
39、控制所述头部向着转动后的方向移动预设距离;
40、当所述支气管镜途经的目标分支点的数量未达到所述途经支点总数,或所述头部与所述路径终点的距离不小于所述第一预设距离阈值时,获取新的术中导航图像,并将新的术中导航图像输入所述方向调整模型,得到新的方向调整参数;
41、根据新的方向调整参数,控制所述支气管镜的头部转动;
42、在所述头部转动完毕后,控制所述头部向着转动后的方向移动预设距离,直到所述支气管镜途经的目标分支点的数量达到所述途经支点总数,且所述头部与所述路径终点的距离小于所述第一预设距离阈值。
43、在其中一个实施例中,所述获取所述支气管镜途经的目标分支点的数量,包括:
44、获取各个所述目标分支点在所述第一坐标系中的位置信息;
45、根据所述第一坐标系和所述第二坐标系的配准映射关系,获取各个所述目标分支点在所述第二坐标系中的位置信息;
46、根据所述第二坐标系中所述支气管镜的移动路径的位置信息和所述目标分支点在所述第二坐标系中的位置信息,获取所述支气管镜途经的分支点的总数。
47、第二方面,本技术还提供了一种支气管镜移动控制系统,包括:
48、分割模块,用于根据接收到的分割指令,从所述分割指令携带的待处理躯干图像上分割出目标区域;
49、确定模块,用于根据接收到的路径规划指令和所述目标区域,确定支气管镜的移动路径;
50、获取模块,用于根据所述移动路径,获取所述支气管镜的途经支点总数;
51、控制模块,用于根据所述途经支点总数和所述支气管镜实时获取的术中导航图像,控制所述支气管镜移动。
52、第三方面,本技术还提供了一种手术机器人,包括机械臂台车、支气管镜和处理器,所述支气管镜和所述处理器均设置在所述机械臂台车上所述机械臂台车用于调节所述支气管镜与病床的位置;
53、所述支气管镜用于采集术中导航图像;
54、所述处理器用于处理执行上述任一实施例所述的支气管镜移动控制方法,以控制所述支气管镜移动。
55、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一实施例所述的支气管镜移动控制方法。
56、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序产品被处理器执行时实现上述任一实施例所述的支气管镜移动控制方法。
57、上述支气管镜移动控制方法、装置、计算机设备、存储介质和计算机程序产品,能够自动调整支气管镜的移动方向并进镜,节省医生精力,提高手术质量,不仅移除了术中进行支气管镜的移动定位时对磁导航系统的依赖,也降低了术中磁导航系统运行不稳定对手术的影响,降低了手术操作的复杂度及手术时间,降低了手术的风险。
- 还没有人留言评论。精彩留言会获得点赞!