一种踝关节康复机器人
本技术涉及关节医疗康复的,具体涉及一种踝关节康复机器人。
背景技术:
1、踝关节是人体的重要关节之一,随着全民运动的兴起和人口老龄化问题的加剧,踝关节损伤的及康复的问题日益受到重视。近年来,为了帮助运动障碍患者获得科学有效的康复训练,国内外学者对辅助训练机构进行了大量的研究。
2、随着机器人技术的快速发展,国内外研究人员将现代生物医学工程和机器人技术结合的康复治疗机器人已经成为医疗行业前沿技术的焦点领域。集医疗和机电一体的康复机器人可以根据患者身体数据,调节最佳的训练参数,尽可能模拟专业康复治疗方式,达到活动主要关节和主要肌肉群的目的。
3、目前,踝关节康复机器人普遍存在自由度不足或冗余、人机交互性差、安全保障不足等方面的问题。
技术实现思路
1、鉴于上述问题,本发明为了解决上述问题,提供了一种新的3-urpu/rrp结构的踝关节康复机器人。为实现上述目的,本发明采用以下具体技术方案:
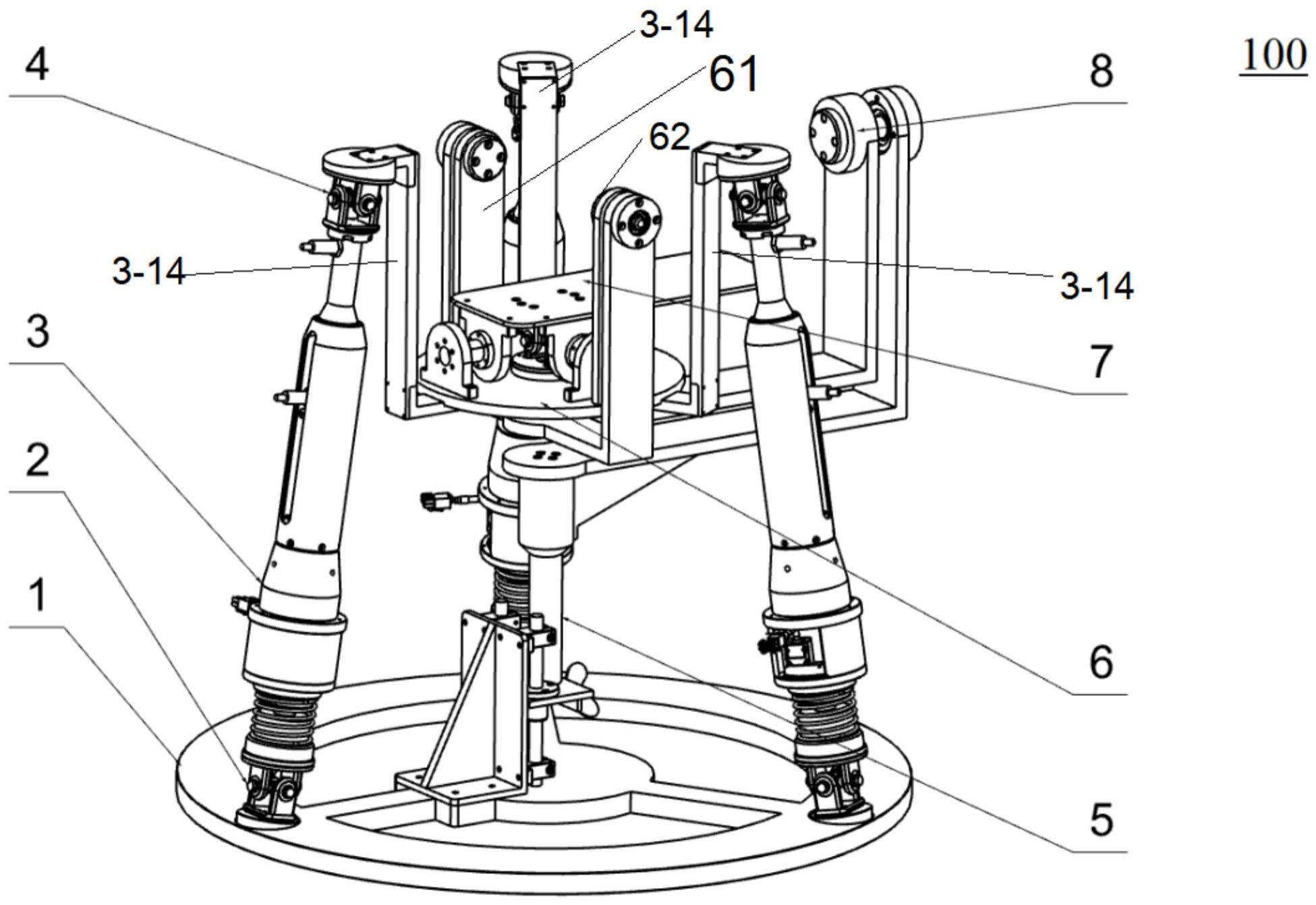
2、一种踝关节康复机器人,包括:用以固定患者脚踝部位的脚部固定装置、若干个位移促动器、导向支撑组件、上下相对布置的康复静平台和康复动平台;所述脚部固定装置可拆卸地连接于所述康复动平台上;所述位移促动器的底部与所述康复静平台连接,所述位移促动器的顶部与所述康复动平台连接,所述若干个位移促动器的底部均布在所述康复静平台的周向,所述若干个位移促动器的顶部均布在所述康复动平台的周向;所述旋转机构的旋转中心高于所述脚部固定装置的任一位置;所述旋转机构至少由两个转动副形成,且两个所述转动副的轴线呈异面垂直;所述康复动平台上设有第一动平台立板和第二动平台立板,所述第一动平台立板和所述第二动平台立板分别位于所述脚部固定装置的两侧,且所述第一动平台立板和所述第二动平台立板分别与所述旋转机构连接;所述导向支撑组件位于所述踝关节康复机器人整体的中心线上,所述导向支撑组件的底部与所述康复静平台的中心连接,所述导向支撑组件的顶部与所述康复动平台的中心连接,所述导向支撑组件的上端与所述旋转机构的下端相接,所述导向支撑组件可向所述旋转机构提供支撑力,在所述导向支撑组件的作用力下,所述康复动平台与所述脚部固定装置之间具有±50mm范围的高度调整能力。
3、优选地,所述旋转机构包括第一支撑工装、第一轴承座、第二支撑工装及第二轴承座,所述第一支撑工装置于所述第二支撑工装的下方,所述第一支撑工装与所述导向支撑组件相连,所述第一支撑工装与所述第二支撑工装通过所述第一轴承座连接,所述第二支撑工装与所述康复动平台通过所述第二轴承座连接。
4、优选地,所述第一支撑工装为l型支撑工装,所述l型支撑工装包括l型立板和l型底板,所述第二支撑工装的底面为t型,所述t型的三个端点分别垂直立有第一立板、第二立板和第三立板,所述l型立板与所述第一立板相连,所述第二立板和所述第一动平台立板相连,所述第三立板与所述第二动平台立板相连。
5、优选地,所述第一轴承座为内径20mm的双深沟球轴承,所述第二轴承座为内径12mm的双深沟球轴承。
6、优选地,所述导向支撑组件包括被动移动副和支柱,所述被动移动副包括至少2根直线导轨和至少2个直线轴承,每个直线导轨的中间位置设有至少一个直线轴承,所述直线导轨与所述康复静平台相连,所述直线轴承通过所述支柱与所述旋转机构连接。
7、优选地,所述脚部固定装置的至少一侧边缘和后边缘上分别设置有静态扭矩传感器。
8、优选地,所述旋转中心比所述脚部固定装置的水平位置高100mm-116mm。优选地所述旋转中心比所述脚部固定装置的水平位置高102mm-114mm,进一步优选为104mm-112mm,进一步优选为106mm-110mm。本发明提供的新型脚踝康复装置采用一种新型的3-urpu/rrp构型,相较于常规的3-upu/s构型,该构型的动平台的旋转机构至少由两个转动副构成,置于脚踏板上方100mm-116mm处,即脚部置于脚踏板时,旋转中心与踝关节可实现同等高度,更符合人机工程学,提高了运动康复效果。尤其当动平台的旋转中心置于脚踏板上方108mm时,更好地提高了运动康复效果。
9、优选地,所述踝关节康复机器人采用3-urpu/rrp构型,由三个主动位移促动器和一个被动导向支撑组件组成,并通过倾斜安装面与运动康复动、静平台来实现固连;其中,位移促动器底部设计有被动柔顺组件,便于实现柔顺控制,导向支撑组件可被动实现伸缩,且为伸缩提供导向作用,提高本发明针对不同人群的适应性,并保证整体刚度,在动平台上置有脚踏板组件,并通过扭矩传感器实现力反馈便于康复过程的交互控制、效果评估以及提供安全保障。本发明结构紧凑、控制效果好、安全可靠,可以更好地满足踝关节的康复需求。
10、优选地,所述位移促动器的数量为3个,且每个所述位移移动器自下至上设置有被动柔顺组件、电机舱、连接舱、丝杠、丝杠螺母、促动器外壳及伸缩活动体。
11、优选为,所述被动移动副包括至少2根直线导轨和至少2个直线轴承,且所述直线导轨的数量和所述直线轴承的数量相等,用于提供所述康复动平台及与其相连的脚部固定装置±50mm范围的高度调整能力。进一步优选为,所述被动移动副包括2根-4根直线导轨和2个-4个直线轴承,且所述直线导轨的数量和所述直线轴承的数量相等,用于提供所述康复动平台及与其相连的脚部固定装置±45mm范围的高度调整能力,进一步优选为±43mm,再进一步优选为±42mm,再进一步优选为±41mm。
12、再进一步优选为,所述被动移动副包括2根直线导轨和2个直线轴承,用于提供所述康复动平台及与其相连的脚部固定装置±40.5mm范围的高度调整能力。为了满足不同人群小腿长度差异,提供本发明的适用性,导向支撑组件设计有两根直线导轨与两个直线轴承作为被动移动副,由三个位移促动器同时伸长或缩短,在导向支撑组件的自由度限制下,提供动平台及与其相连的脚部固定装置±40.5mm范围的高度调整能力,在调整到位后,在该位置锁紧,位移促动器将此时位置作为初始位置,运动功能康复动作将基于此高度进行,从而满足不同人群的需求。
13、优选地,所述脚部固定装置通过中虎克铰与所述康复动平台的中心位置连接。这里的中虎克铰中的“中”仅用于区别于结构中的其他虎克铰。
14、本发明所提供的新型的踝关节康复机器人采用3-urpu/rrp构型,相较于现有技术中的3-upu/s或3-upru/s构型的踝关节康复机器人具有良好的有益效果,本发明所提供的踝关节康复机器人的康复动平台的旋转中心置于所述脚部固定装置的上方,所述旋转机构的旋转中心高于所述脚部固定装置,当用户的脚部置于所述脚部固定装置上时,可实现旋转中心与踝关节两者位于同等高度,更符合人机工程学,有效地提高了运动康复效果。其中,构型中的u代表虎克铰副,rp代表转动和移动的耦合副,p代表移动副,rr代表两个转动副叠加,s代表球铰副,rrp代表被动转动副和移动副。所以,3-upu/s表示三条两端为虎克铰中间为移动副的支链;3-upru/s表示三条两端为虎克铰中间为旋转移动耦合副的支链,一条只有一端为球铰副的支链;3-urpu/rrp表示三条两端为虎克铰中间为转动和移动耦合副的主动运动支链和一条两个转动副和一个移动副叠加的被动运动支链。
15、上述
技术实现要素:
相关记载仅是本技术技术方案的概述,为了让本领域普通技术人员能够更清楚地了解本技术的技术方案,进而可以依据说明书的文字及附图记载的内容予以实施,并且为了让本技术的上述目的及其它目的、特征和优点能够更易于理解,以下结合本技术的具体实施方式及附图进行说明。
- 还没有人留言评论。精彩留言会获得点赞!