一种器械、内窥镜系统、医疗系统及其定位控制方法与流程
本发明属于医疗数据识别,涉及一种器械、内窥镜系统、医疗系统及其定位控制方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、内窥镜是集中了传统光学、人体工程学、精密机械、现代电子、数学、软件等于一体的检测仪器。内窥镜可以由微小孔道进入体内,对于微创手术具有重要的意义。
3、目前的内窥镜一般有四种应用方式。一种是手持式内窥镜,即再手术过程中,需要一名专业的扶镜工作者,需工作者手持内窥镜握柄,根据医生操作需要,人工调整内窥镜的位置和姿态,劳动强度大,医护人力成本投入大。另一种是利用手术机器人的一个机械臂来控制内窥镜,改变镜头方向和位置,但是这种方式需要操作者在手术过程中不断切换机械臂的作业,以进行内窥镜位置调整或手术,流程复杂,容易出错。
4、还有两种是扶镜机器人和自推进式内窥镜系统,可以利用遥控控制或者声音控制、眼球随动控制,这种方式在一定程度上解决了前两种方式的问题,但该方式仍需要操作者在器械操作外做额外的动作进行内窥镜单独操作,增加了操作强度,虽然有部分机器人或内窥镜系统做到自动跟踪高光斑来跟随器械运动,但由于体内环境多有亮斑,器械大多做过消光处理,实际应用效果并不理想。
5、另外,在实际应用时还需要根据器械的定位来控制内窥镜,器械本身或定位器也会影响内窥镜的控制效果和准确度。以骨科关节微创手术为例进行说明,一般会开两个小切口,一个用于关节镜,另一个用于在关节腔内使用的器械,对于器械定位大多采用定位器的方式,定位器占用一定的空间,影响手术操作,在较狭小的操作空间内两种器械同时使用时,距离较近或定位器交叉时会造成互相干扰,限制了使用条件;且定位器多与器械拆分,使用时组合,极易造成混乱,手术的安全存有隐患。
技术实现思路
1、本发明为了解决上述问题,提出了一种器械、内窥镜系统、医疗系统及其定位控制方法,本发明能够实现低成本的对器械的准确定位,以及对内窥镜的定位控制。
2、根据一些实施例,本发明采用如下技术方案:
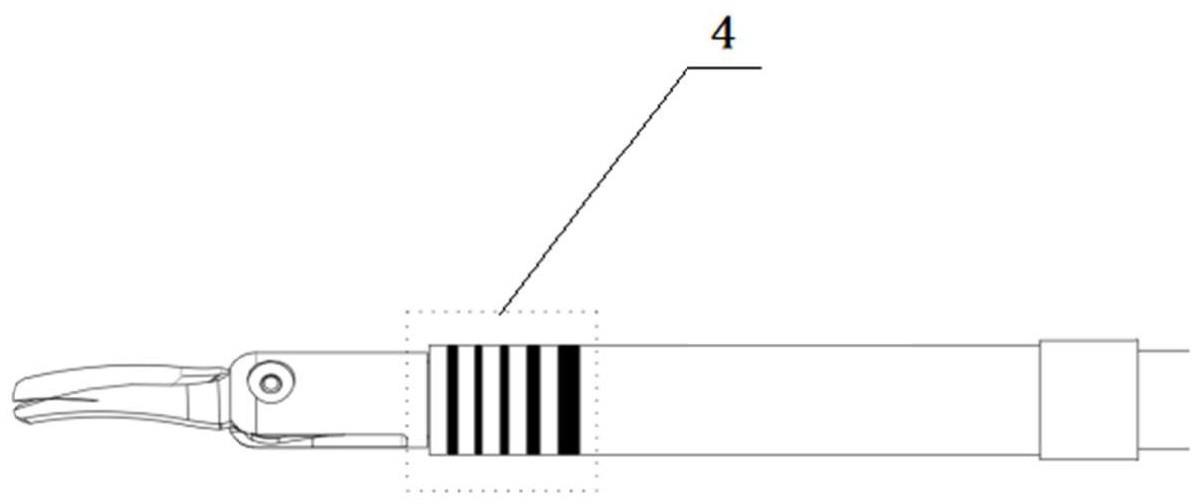
3、本发明的第一方面,提供一种器械,包括器械本体,所述器械本体前部的至少一部分,周向设置有标识码,所述标识码内存储有与所述器械相对应的器械模型信息。
4、因为器械前端一般就是执行机构,所以在执行机构或者执行机构的连接件上,即器械前端某段部分,设置标识码,能够保证器械执行部分始终在内窥镜的视场中间或中间附近位置。
5、作为可选择的实施方式,所述标识码的起始端或/和结束端设置有用于表明器械方向的标志。
6、通过所述标志能够很快的确定器械的前端和后端。
7、作为可选择的实施方式,所述标识码为条形码,所述条形码包括多个依次间隔设置的黑白条纹,且所述条纹围绕器械前部至少一段整圈环绕布设。
8、作为进一步的限定,所述条形码的起始端或结束端为黑色条纹,且该黑色条纹的宽度异于其他黑色条纹的宽度。
9、作为可选择的实施方式,所述条形码的起始端或结束端为黑色条纹,且该黑色条纹的边缘设置有若干凸起部或缺口。
10、作为可选择的实施方式,所述器械在条形码的起始端和结束端的直径长度不同。
11、本发明的第二方面,提供一种内窥镜系统,包括自推进式内窥镜、处理器和显示设备,其中:
12、所述自推进式内窥镜与所述处理器电连接,所述处理器与所述显示设备通信连接;
13、所述自推进式内窥镜的镜头可相对所述自推进式内窥镜本体转动,以获取图像/影像信息;
14、所述显示设备用于显示所述镜头所拍摄的空间图像/影像信息;
15、所述处理器用于根据镜头获取到的图像/影像信息,确定第一方面提供的器械上设置的标识码位于内窥镜视场中的位置,计算所述器械的姿态和位置,对比计算结果和所述器械模型信息,根据对比结果生成调整指令,控制自推进式内窥镜的运动,以使得所述自推进式内窥镜始终跟随器械运动,且保证器械前端始终位于视场的设定位置范围内。
16、本发明的第三方面,提供一种医疗系统,包括:
17、内窥镜,用于获取图像/影像信息;
18、机器人,用于控制内窥镜的位置和运动方向;
19、器械,器械前部的至少一部分周向设置有标识码,所述标识码内存储有与所述器械相对应的器械模型信息;
20、处理器,与内窥镜和机器人通信,用于根据内窥镜采集到的图像/影像信息,确定所述标识码位于内窥镜视场中的位置,计算所述器械的姿态和位置,对比计算结果和所述器械模型信息,根据对比结果生成调整指令,发送给所述机器人,以依照调整指令控制所述内窥镜运动,以使得所述内窥镜始终跟随所述器械运动,且保证器械前端始终位于视场的设定位置范围内。
21、上述医疗系统的设计,使器械前部(如手术钳的杆部)至少一部分/一段,圆周设置有标识码,标识码整圈环绕,保证在内窥镜视角下任意角度都能有效读取标识码,根据标识码位于内窥镜视场中的位置,并计算标识码的偏摆角度、直径角度,系统内部进行识别码读出的器械模型尺寸与视场计算的模型尺寸进行比较计算,进而调整内窥镜姿态,使器械钳端的标识码始终保持在视场中央并且保持一定深度距离,准确定位器械的空间位置。
22、以下实施方式,是作为第二方面的内窥镜系统以及第三方面的手术系统均可以选择的实施方式。
23、所述处理器包括:
24、识别模块,被配置为识别内窥镜获取的视场内的标识码,读取标识码内存储的器械模型信息;
25、定位模块,被配置为锁定所述标识码位置,确定标识码在视场中的位置信息;
26、计算模块,被配置为结合所述器械模型信息和位置信息,计算标识码相对所述视场中间位置的偏移方向和偏移量信息;
27、指令生成模块,被配置为根据所述偏移方向和偏移量,生成运动信号,以使标识码位于视场中间。
28、进一步的,所述处理器还包括通信模块,被配置为和机器人进行通信,发送所述运动信号。
29、作为进一步限定的实施方式,所述计算模块,包括:
30、第一存储模块,被配置为存有内窥镜和器械标识码之间的预设位置信息;
31、第一确定模块,被配置为根据器械模型信息内存储的参数和所述预设位置信息,计算器械上标识码长度在视场中的应有的目标值;
32、第一比较模块,被配置为比较所述目标值和实际值,所述实际值从标识码在视场中的位置信息中得到;
33、第一生成模块,被配置为若所述目标值和实际值的差值在设定范围外,根据所述差值,生成所述内窥镜的视场深度调整信息。
34、作为进一步限定的实施方式,所述计算模块,还包括:
35、第二存储模块,被配置为存有所述器械标识码和水平线之间的预设角度信息;
36、第二确定模块,被配置为根据器械标识码的识别结果,确定器械方向,以及和水平线之间的实际角度;
37、第二比较模块,被配置为比较所述预设角度信息和实际角度;
38、第二生成模块,被配置为若所述预设角度信息和实际角度的差值在设定范围外,根据所述差值,生成所述内窥镜的视场角度调整信息。
39、作为进一步限定的实施方式,所述识别模块,包括:
40、读取模块,被配置为根据图像中的标识码,读取标识码内存储的器械模型信息;
41、判断模块,被配置为判断所述标识码在本次手术前是否被读取过,如果是则生成错误信息,调用告警模块,否则调用定位模块;
42、所述告警模块,被配置为提示器械使用过,需要更换器械的信息。
43、作为进一步限定的实施方式,所述识别模块,包括:
44、读取模块,被配置为获取视场内每个标识码,读取标识码的相关信息;
45、输入模块,被配置为选取需要视角跟随的器械所持有的标识码;
46、对比模块,被配置为通过标识码重复识别对比,如果是选定的需要视角跟随的器械所持有的标识码,对位置信息进行处理,如果不是,则需要切换跟随器械,发送信号给读取模块,重新获取视场内每个条形码,读取条形码的相关信息。
47、本发明的第四方面,提供一种基于上述内窥镜系统的定位控制方法,包括:
48、镜头获取图像/影像信息;
49、处理器根据镜头获取到的图像/影像信息,确定第一方面提供的器械上设置的标识码位于自推进式内窥镜的视场中的位置,计算所述器械的姿态和位置,对比计算结果和所述器械模型信息,根据对比结果生成调整指令,控制自推进式内窥镜的运动,以使得所述自推进式内窥镜始终跟随器械运动,且保证器械前端始终位于视场的设定位置范围内。
50、本发明的第五方面,提供一种基于上述医疗系统的定位控制方法,包括:
51、内窥镜获取图像/影像信息;
52、处理器根据内窥镜采集到的图像/影像信息,确定器械前端设置的、存储有与所述器械相对应的器械模型信息的标识码位于内窥镜视场中的位置,计算所述器械的姿态和位置,对比计算结果和所述器械模型信息,根据对比结果生成调整指令,发送给所述机器人,以依照调整指令控制所述内窥镜运动,使所述内窥镜始终跟随所述器械运动,且保证器械前端始终位于视场的设定位置范围内;
53、机器人根据调整指令控制内窥镜的位置和运动方向。
54、与现有技术相比,本发明的有益效果为:
55、本发明通过在器械前端设置标识码,结合处理器的图像处理和计算,能够得到器械与内窥镜的相对位置、姿态信息,进而生成调整指令,以保证器械执行部分始终在内窥镜的视场中间或中间附近位置,保证内窥镜始终跟随器械运动而运动,保证器械的执行部分始终在镜头拍摄的图像/影像内,有助于提高视角跟随的稳定性和实时性。
56、本发明对于器械本体并不进行大幅结构改进,成本投入小,且能够保证器械在本次手术前没有使用过,提高了手术的安全性。
57、本发明能够自动根据内窥镜采集的图像/影像进行视觉定位跟踪,不需要扶镜人员,也解决了高光斑不易跟踪,定位器容易干扰器械、占用手术空间等问题,降低了操作者劳动强度。
- 还没有人留言评论。精彩留言会获得点赞!