用于电离辐照环境的多自由度转运装置和方法与流程
本技术涉及核工程,尤其涉及用于电离辐照环境的多自由度转运装置和方法。
背景技术:
1、核工业中的核能源、核燃料和核废料都有辐射性,这就造成核工业环境是具有高放射性、高温、高危等特点的特殊工业环境。因此,若操作人员直接进入该环境将会受到大量的辐射,所以这就需要进行严格的辐射防护措施。此外,核工业中的作业设备众多、管路交错,且作业环境复杂多变。因此,这些特点给机电设备及设施的安装、调试、维修都带来了较大的难度。普通工业环境中常规的切割、打磨、焊接等操作在核工业环境中就会变得异常艰难。同时,这还会增加人工操作的任务量,甚至在工作过程中提高人因事故发生的概率。特别地,焊接、金属加工、拆除、切割等工作精确度要求高、耗费时间长,若操作人员直接进入恶劣环境中工作,将会对自身安全以及核工业整体工作的可行性带来影响。
2、目前,为解决操作人员在恶劣环境中工作的问题,一般采用操作人员直接穿防护服或在其他防护措施保护的前提下进入作业环境以进行作业的方法,同时严格控制进入时间和频率。但是,进入高温高辐射环境中工作仍会对人员的健康造成一定的影响,同时由于时间和频率控制,精细化作业的准确性无法得到保障,也无法及时、灵活地完成调试工作。此外,目前还会使用机械手加持作业工具,从而避免工作人员直接进入核辐射环境。专利cn214446395公开了一种核燃料板抓取用机械手臂,机器人手末端抓具设置于关节机器人手臂的输出端上,机器人手末端抓具包括抓取机架、设置于抓取机架两端的机械式夹持机构,该机械手臂能够避免核燃料在转运过程中掉落。专利cn103971768公开了一种燃料棒更换机械手,包括芯杆、弹性夹爪和锁紧套筒,通过多个夹爪夹紧燃料棒,能够实现核燃料棒的抓取。但是,由于机械手的负载有限,很难完成大部分重载作业,同时,由于核工业中使用的机械手远程操作精度十分有限,所以无法对待加工件进行精确定位。举例来说,放射性环境下,机电设备及设施一般都设置箱室内部,空间局限,设备密度大。依靠顶置的动力机械手和侧置的主从机械手虽然能够在一定程度上完成一些较为复杂的操作,但是也面临着空间受限、载荷限制、精度有限等挑战。不管是用户操作、总体设计以及维修保障都造成了不少困扰。特别是对于在设备设施底部发生的故障和问题,往往由于视野盲区和空间限制而无从下“手”。
技术实现思路
1、本技术的目的是解决上述的技术问题。
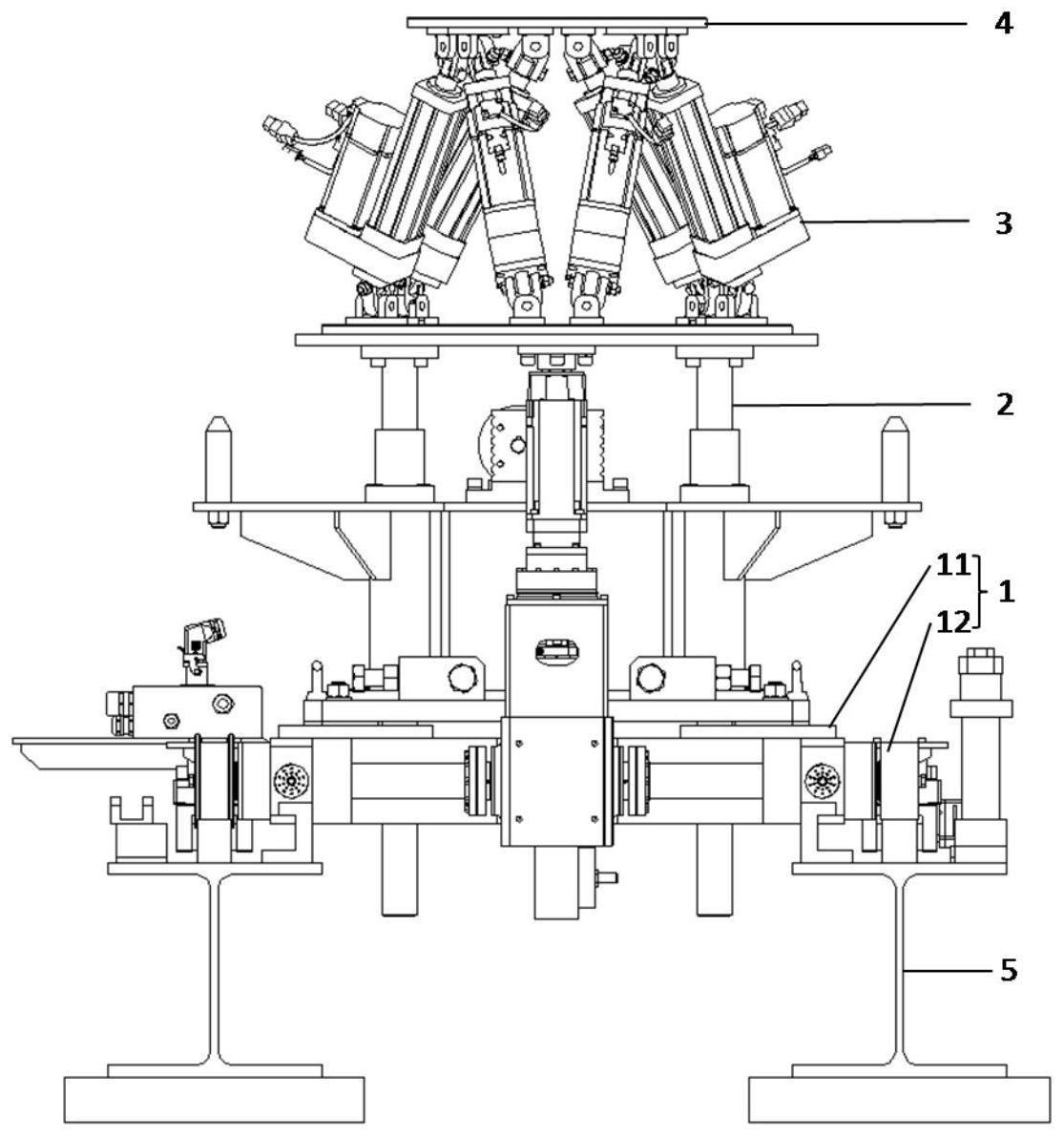
2、为达到上述目的,本技术第一方面提出了用于电离辐照环境的多自由度转运装置,用于作业设备的转运操作,包括平移组件、升降组件、调节组件和置物平台,其中,平移组件包括支架和连接至支架的滚轮,平移组件驱动多自由度转运装置沿水平方向运动,升降组件位于平移组件上方,调节组件位于升降组件上方,置物平台位于调节组件上方,升降组件驱动调节组件沿竖直方向运动,调节组件驱动置物平台在多自由度方向运动。
3、进一步地,至少部分滚轮具有与轨道配合的侧缘,侧缘位于滚轮的两个侧面。
4、进一步地,滚轮为四个或四个以上的偶数个,半数滚轮具有侧缘,具有侧缘的滚轮位于轨道的同侧。
5、进一步地,平移组件还包括驱动组件,驱动组件包括第一电动机、第一减速器、第一传动轴、第一联轴器和轴承,第一电动机、第一减速器、第一传动轴串联连接,第一联轴器与第一传动轴连接,第一传动轴沿水平方向设置,轴承设置在滚轮上,第一电动机驱动滚轮滚动从而驱动平移组件沿轨道运动。
6、进一步地,升降组件包括底座结构、底座平台、伸缩机构和顶升平台,底座平台位于底座结构上方,伸缩机构位于底座平台上方,顶升平台位于伸缩机构上方,伸缩机构用于调整底座平台与顶升平台的间距。
7、进一步地,伸缩机构包括第二电动机、第二减速器、第二传动轴、第二联轴器和螺旋升降机,第二电动机、第二减速器、第二传动轴串联连接,第二联轴器与第二传动轴连接,第二传动轴沿水平方向设置,螺旋升降机至少为两个,螺旋升降机沿竖直方向设置,第二电动机驱动螺旋升降机转动从而驱动顶升平台沿竖直方向运动。
8、进一步地,升降组件还包括设置在伸缩机构侧面的滑动机构,滑动机构包括滑动导轨和滑动轴承,滑动导轨平行于螺旋升降机设置,滑动导轨在滑动轴承中运动。
9、进一步地,调节组件包括多个杆状调节件,杆状调节件的上部与置物平台连接,杆状调节件的下部与顶升平台连接,杆状调节件相对于竖直方向倾斜设置,杆状调节件沿其长度方向可伸缩。
10、进一步地,杆状调节件为n个,其中,4≤n≤8。
11、进一步地,杆状调节件包括n个,其中,n=6。
12、进一步地,杆状调节件包括电缸和两个铰接头,铰接头位于电缸的两端,电缸通过铰接头连接至顶升平台和置物平台。
13、进一步地,支架、底座平台、顶升平台和置物平台轴线对中。
14、进一步地,置物平台横截面的外接圆半径为r1,顶升平台横截面的外接圆半径为r2,底座平台横截面的外接圆半径为r3,其中,r1<r2<r3。
15、进一步地,轨道具有轨距d,其中,d≥2r3。
16、进一步地,置物平台的横截面、顶升平台的横截面和底座平台为正多边形或圆形。
17、进一步地,该装置还包括夹紧部件,夹紧部件位于支架的两侧,夹紧部件用于夹紧轨道。
18、进一步地,夹紧部件包括夹爪和气缸,气缸驱动夹爪夹紧轨道。
19、进一步地,该装置还包括限位机构,限位机构包括限位开关和两个限位撞块,限位开关位于支架上且位于支架的侧面,限位撞块安装于轨道上。
20、应用本发明的上述技术方案,至少实现了如下技术效果:
21、1.该多自由度转运装置具有长距离水平移动功能,能够将作业设备运输至工作地点。
22、2.该多自由度转运装置具有较长距离升降功能,能够将作业设备从低位顶升至作业高度。
23、3.该多自由度转运装置中具有x轴、y轴、z轴三向的短距离高精度移动功能,以及绕x轴、y轴、z轴三向的短距离旋转功能,从而能够在工作位置实现作业设备位置和姿态的精确调整功能。
24、4.该多自由度转运装置的结构简洁且紧凑,便于快速安装和拆卸,能够方便地在放射性箱室环境内进行转入和转出,并通过与相应的工作装置配合,完成安装、拆卸、焊接、加工、操作、搬运等多种复杂操作。
25、5.该多自由度转运装置可沿轨道进行长距离移动,能够承受较大上部设备载荷,并且无需对行进方向进行严格控制。
26、6.该多自由度转运装置具有轨道夹紧装置,能够在作业识别工作时夹紧轨道,使整车的位置固定,避免因工作过程种的反向力以及震动等因素而造成装置整体移动。
27、7.该多自由度转运装置具有足够的限位保护功能,能够实现电气保护控制,避免装置移动到非工作区域,并实现特定轨道位置的标记和识别。
28、为达到上述目的,本技术第二方面提出了使用多自由度转运装置的作业设备转运方法,多自由度转运装置包括平移组件、升降组件、调节组件和置物平台,多自由度转运装置用于沿轨道转运作业设备,多自由度转运装置还包括夹紧部件,用于将轨道夹紧,作业设备转运方法包括:
29、s1,通过调节组件,将置物平台调平,并将作业设备安装于置物平台上;
30、s2,通过平移组件,将多自由度转运装置和作业设备移动到工作位置下方;
31、s3,通过升降组件,将调节组件和置物平台从初始位置沿竖直方向上升,以移动到接近工作高度;
32、s4,通过调节组件,将位于置物平台上的作业设备调整到作业所需工作高度和位姿;
33、s5,通过夹紧部件,将轨道夹紧固定,以进行作业,并在作业完成后,将夹紧部件从轨道松开;
34、s6,通过升降组件,将调节组件和置物平台移动到初始位置;
35、s7,通过平移组件将多自由度转运装置退出工作位置。
36、应用本发明的上述技术方案,至少实现了如下技术效果:
37、1.该使用多自由度转运装置的方法能够在工作人员不进入工作环境的前提下,远程操控多自由度转运装置,灵活、快速地实现作业设备的长距离平移和升降以到达对其工作位置进行粗定位或恢复初始位置。
38、2.该使用多自由度转运装置的方法能够在工作人员不进入工作环境的前提下,远程操控多自由度转运装置,通过短距离多自由方向的运动,实现置物平台升降、倾斜、旋转等运动,从而使得作业设备满足工作时的位姿要求。
39、3.该使用多自由度转运装置的方法能够在工作人员不进入工作环境的前提下,远程操控多自由度转运装置,通过轨道夹紧和释放操作,保障作业设备在工作时的稳定性以及移动的灵活性。
40、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!