钢筋端面识别计数装置及方法
本发明属于钢筋计数,具体涉及一种钢筋端面识别计数装置及方法。
背景技术:
1、多年来,我国建筑行业持续高速发展,作为建筑必需品的钢筋也保持着巨大的经济体量。在钢筋生产和销售中,钢筋数量的精准统计始终是重要的环节,因此在成捆钢筋打标时就能快速、精确地统计出钢筋的数量,对提升现场生产效率、降低人力成本具有重要的意义。
2、钢筋打捆时的初步计数精度较低,因此设有复检环节。目前企业复检多采用称重法、点支电子自动计数笔和线激光扫描。由于负公差生产工艺,在钢筋直径较小、长度较短等条件下,称重法的结果容易产生误差,已成为钢筋生产线上的痛点。而点支电子自动计数笔需要人工逐一触碰,费时费力。线激光扫描则容易将不同的端面连接起来,造成误判。随着机器视觉的图像处理技术越来越成熟,在各行各业广泛应用,近年来已有学者在钢筋端面识别计数算法上做研究,提出了多种计数方法,如连通面积计数法、边缘检测方法、基于神经网络的方法等。各方法均实现了很大程度的自动化钢筋识别,为钢筋产业数字化发展与产业升级注入了动力,但也各有其局限性。边缘检测和面积法受端面图像黏连的影响较大,基于神经网络的方法工作量较大且算法复杂,且对偶尔出现的特殊端面难以有效识别。因此,亟需对钢筋端面识别计数方法做进一步的改进。
技术实现思路
1、本发明针对上述问题提供了一种钢筋端面识别计数装置及方法。
2、为达到上述目的本发明采用了以下技术方案:
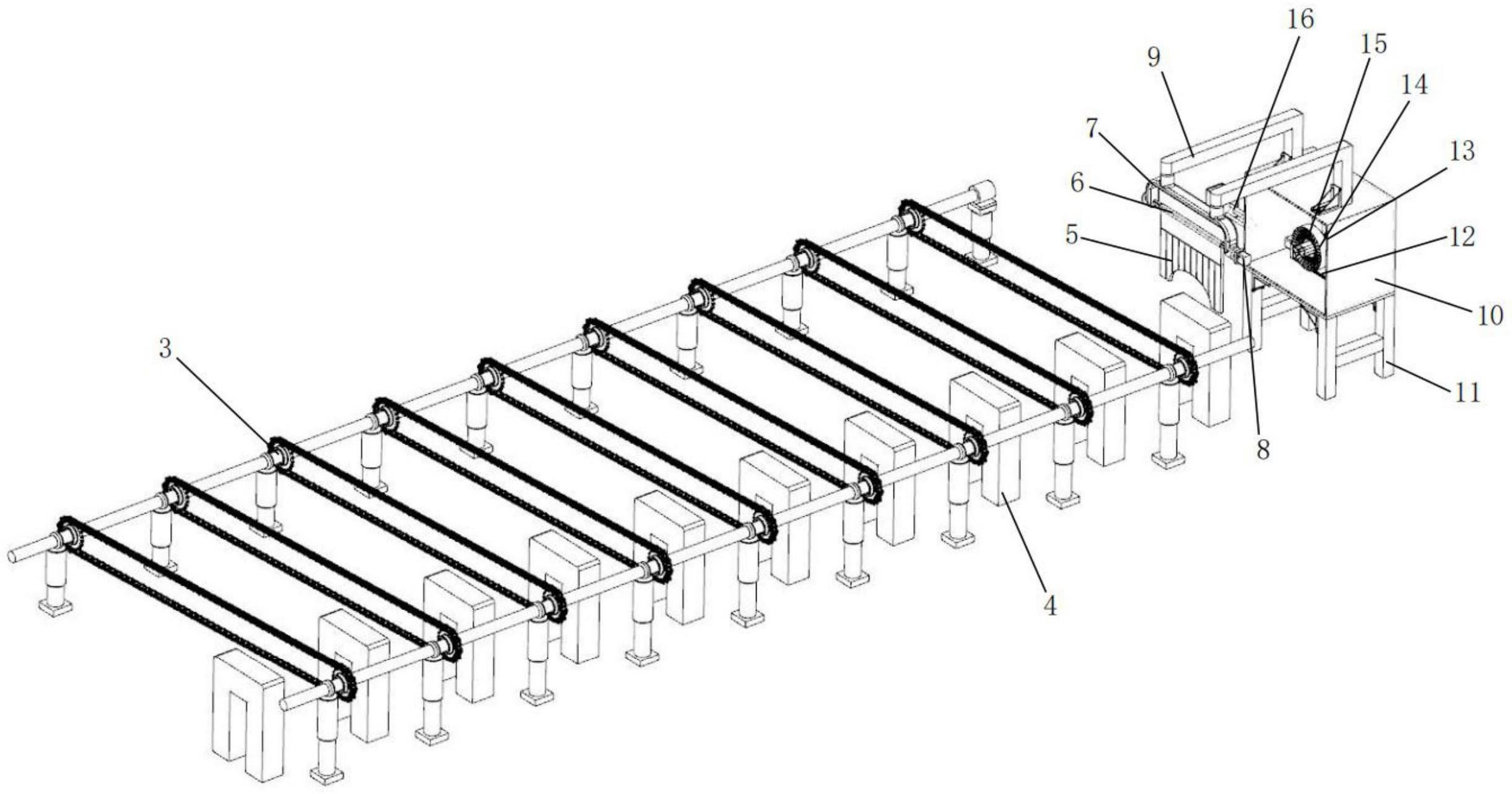
3、钢筋端面识别计数装置,包括钢筋输送机构,在所述钢筋输送机构的前部和后部均设置有端面撞齐挡板,在所述钢筋输送机构的下方设置有转运机构,用于将端部撞齐的成捆钢筋输送至检测台,在所述检测台前部的上方设置有可升降的遮光帘,所述遮光帘的上端缠绕在卷轴上,所述卷轴的两端转动设置在安装架上,在所述安装架的一侧设置有卷帘电机,所述卷轴与卷帘电机的输出轴固定连接,所述安装架通过连接杆固定连接在箱体上,所述箱体设置在检测台的前方,在所述箱体的下表面设置有支腿,在所述箱体内部设置有位置调节机构,在所述位置调节机构上设置有滑台,在所述滑台上设置有环形聚光灯,在所述环形聚光灯的中部设置有采集镜头,在所述箱体靠近钢筋输送机构的一侧设置有激光传感器,所述激光传感器用于感应钢筋捆的位置,所述钢筋输送机构、转运机、卷帘电机、位置调节机构、环形聚光灯、采集镜头和激光传感器均由控制台控制。
4、进一步,所述钢筋输送机构为托辊输送机构。
5、更进一步,所述转运机构包括两个链轴,在两个链轴上设置有多个一一对应的链轮,在两个对应的链轮之间设置有链条,在所述链轴由多个轴承座共同支撑,在每个轴承座的下方均设置有伸缩缸,用于带动链轴上下移动,所述伸缩缸的缸体安装在地面上,在其中一个所述链轴的端部设置有链传动电机,用于带动链轴旋转,所述链传动电机安装在伸缩缸上。
6、更进一步,所述遮光帘的下边缘呈与钢筋捆对应的弧形状。
7、更进一步,所述位置调节机构包括横向固定座,在所述横向固定座上安装有横向导杆和横向丝杠,在所述横向固定座的一侧设置有横移电机,所述横移电机的输出轴与横向丝杠连接,在所述横向丝杠上螺纹连接有滑块,所述滑块与与横向导杆滑动连接,在所述滑块的上表面固定设置有纵向导杆,在所述纵向导杆的上端设置有纵向座,在所述纵向座与滑块之间还设置有纵向丝杠,在所述纵向座的上表面设置有用于带动纵向丝杠旋转的纵向电机,所述滑台与纵向丝杠螺纹连接,所述滑台与纵向导杆滑动连接。
8、钢筋端面识别计数方法,包括以下步骤:
9、步骤1,建立钢筋端面模板库,具体为:
10、步骤1.1,采集多个钢筋捆端面图像,形成数据集,并将数据集分成训练集和测试集;
11、步骤1.2,从训练集中选择一个钢筋捆端面图像,采用加权平均法对选择的钢筋捆端面图像进行灰度化处理;
12、加权平均法的公式为:
13、gray(x,y)=wr·r(x,y)+wg·g(x,y)+wb·b(x,y)
14、其中,x、y表示各点坐标,gray(x,y)为加权灰度化的结果,r(x,y)、g(x,y)、b(x,y)为各点的红绿蓝分量值,wr、wg、wb为对应的权值;
15、步骤1.3,对灰度化处理后的钢筋捆端面图像进行gamma变换;
16、gamma函数公式如下:
17、
18、其中,gamma(x,y)为gamma变换后的归一化灰度图,γ为校正参数;
19、步骤1.4,通过下述计算公式消除gamma变换后钢筋捆端面图像背景中的杂物干扰,完成背景暗部消除:
20、
21、其中,f(x,y)为除杂之后的钢筋捆端面图像,m为背景消除阈值;
22、步骤1.5,对除杂之后的钢筋捆端面图像进行高斯滤波降噪;
23、步骤1.6,从钢筋捆端面图中逐像素点的截取与正模板相同的局部图,并逐一的计算与正模板库中每个正模板的匹配度,若正模板库中无正模板则直接进行步骤1.9;
24、将所有的匹配结果输出为二维矩阵,其匹配度的计算公式如下:
25、
26、其中,w和h分别为正模板的宽度和高度,t(x',y')为正模板坐标(x',y')处的值,i(x,y)为预处理后的图像上坐标(x,y)处的值,r(x,y)为输出矩阵;其中t(x',y')在正模板上的位置与i(x,y)在预处理后图像上的位置相同;
27、将二维矩阵中的匹配度分别与匹配阈值c进行比较,大于等于匹配阈值c即识别为钢筋端面图像,记为1,小于阈值即识别为非钢筋端面,记为0,最终得到识别结果矩阵flag(x,y):
28、
29、步骤1.7,剔除重复结果;设定局部图中的某一点作为该局部图的表示坐标,计算相邻识别结果之间的距离h=[(x2-x1)2+(y2-y1)2]0.5,其中x1、x2、y1、y2分别为两个相邻识别结果的横坐标和纵坐标,选择钢筋半径r作为判断阈值,如果h小于r,则认为其为重复结果,舍去其一;重复判断动作,删除所有重复结果,将剩余的识别结果输出为认定结果;
30、步骤1.8,对认定结果中的每个局部图进行ssim除误,将识别结果中的局部图逐一与反模板库中的每个反模板进行结构相似度计算,若反模板库中无反模板则直接进行步骤1.9,
31、
32、其中μx是x的平均值,μy是y的平均值,σx2是x的方差,σy2是y的方差,σxy是x和y的协方差,c1=0.0001l2,c2=0.0009l2是用来维持稳定的常数,l是像素值的动态范围;
33、将计算到的ssim值与ssim阈值进行比较,删除大于等于ssim阈值的结果,输出最终结果;
34、步骤1.9,判断最终结果识别出的钢筋数是否正确,若正确则选取下一张训练集中的图片,重复步骤1.2至步骤1.9,若错误则进行人工除误,将未识别出的钢筋进行单钢筋端面图的截取,并将其加入正模板库中,将错误识别为钢筋的位置进行错图截取,并将其加入反模板库中,随后重复步骤1.7至步骤1.9,直至训练集中的所有图片都正确识别为止;
35、步骤1.10,针对测试集中的钢筋捆端面图像重复步骤1.2至步骤1.8,若测试集中的钢筋捆端面图像中的钢筋数量识别均正确,则建立钢筋端面模板库成功,若测试集中的钢筋捆端面图像中的钢筋数量识别存在错误,则重复步骤1.1至1.10,直至钢筋端面模板库建立成功;
36、步骤2,建立钢筋捆端面模板库并求取平移系数,具体为:
37、步骤2.1,采集多个成捆钢筋的端面图像建立成捆钢筋的端面图像库:通过人为控制将采集镜头对准成捆钢筋的中心位置,并采集成捆钢筋的端面图像作为钢筋捆模板图,要求为图像范围贴紧钢筋捆的上下左右四极;
38、步骤2.2,求取平移系数k:
39、
40、其中l为采集镜头移动的实际距离;
41、步骤3,成捆钢筋端面撞齐;将待计数的成捆钢筋放置在钢筋输送机构上,通过钢筋输送机构带动成捆钢筋进行端面撞齐,且最后一次撞击为前撞齐,以保证在进行技术识别时,成捆钢筋中钢筋的前端面位于同一平面,钢筋输送机构正转时带动成捆钢筋前进并撞击在前部的端面撞齐挡板上,钢筋输送机构反转时带动成捆钢筋后退并撞击在后部的端面撞齐挡板上;
42、步骤4,成捆钢筋撞齐后转运;在成捆钢筋端面撞齐之后,由转运机构将撞齐后的成捆钢筋转运至检测台;
43、步骤5,在成捆钢筋在转运过程中经过激光传感器时,激光传感器采集到成捆钢筋的信号,从而将信号传递至控制台,控制台根据激光传感器采集到的信号控制卷帘电机工作,将遮光帘下放;
44、步骤6,待成捆钢筋就位,遮光帘下放完成后,对成捆钢筋的中心位置进行判断,得到成捆钢筋的中心位置后,控制台控制位置调节机构工作,使采集镜头正对成捆钢筋的中心位置;
45、步骤7,打开环形聚光灯,在环形聚光灯的光照下,通过采集镜头采集成捆钢筋的端面图像,将采集的端面图像上传至控制台,并对采集的端面图像进行识别处理,得出钢筋的数量。
46、进一步,所述步骤6中,对成捆钢筋的中心位置进行判断的具体步骤为:
47、采集成捆钢筋的端面图像,并将采集的图像与步骤2中端面图像库中的图像进行模板匹配,匹配公式如下:
48、
49、其中,w整捆和h整捆分别为钢筋捆模板图的宽度和高度,t(i′,j′)为钢筋捆模板图坐标(i′,j′)处的值,i(i,j)为预处理后的图像上坐标(i,j)处的值,r(i,j)为输出矩阵;其中t(i′,j′)在钢筋捆模板图上的位置与i(i,j)在预处理后图像上的位置相同;
50、若匹配成功,即r(i,j)≥c1,c1为整捆钢筋的匹配阈值,则确定上下左右四极分别为u,d,l,r.则此时钢筋捆的中心center(i,j)为:
51、
52、若匹配不成功,则重新采集图像进行匹配,若连续5次匹配不成功,则将采集镜头对准成捆钢筋的中心位置,并按照钢筋捆模板图的截取要求进行图像截取,并将截取的图像添加至端面图像库中,随后重新采集图像进行成捆钢筋中心位置的判断。
53、进一步,所述步骤7中,并对采集的端面图像进行识别处理,得出钢筋的数量,具体包括以下步骤,
54、步骤7.1,采用加权平均法对采集的端面图像进行灰度化处理;
55、加权平均法的公式为:
56、gray(x,y)=wr·r(x,y)+wg·g(x,y)+wb·b(x,y)
57、其中,x、y表示各点坐标,gray(x,y)为加权灰度化的结果,r(x,y)、g(x,y)、b(x,y)为各点的红绿蓝分量值,wr、wg、wb为对应的权值;
58、步骤7.2,对灰度化处理后的钢筋捆端面图像进行gamma变换;
59、gamma函数公式如下:
60、
61、其中,gamma(x,y)为gamma变换后的归一化灰度图,γ为校正参数;
62、步骤7.3,通过下述计算公式消除gamma变换后端面图像背景中的杂物干扰,完成背景暗部消除:
63、
64、其中,f(x,y)为除杂之后的端面图像,m为背景消除阈值;
65、步骤7.4,对除杂之后的端面图像进行高斯滤波降噪;
66、步骤7.5,从钢筋捆端面图中逐像素点的截取与正模板相同的局部图,并逐一的计算与正模板库中每个正模板的匹配度,将所有的匹配结果输出为二维矩阵,其匹配度的计算公式如下:
67、
68、其中,w和h分别为正模板的宽度和高度,t(x',y')为正模板坐标(x',y')处的值,i(x,y)为预处理后的图像上坐标(x,y)处的值,r(x,y)为输出矩阵;
69、将二维矩阵中的匹配度分别与匹配阈值c进行比较,大于等于匹配阈值c即识别为钢筋端面图像,记为1,小于阈值即识别为非钢筋端面,记为0,最终得到识别结果矩阵flag(x,y):
70、;
71、步骤7.6,剔除重复结果;设定局部图中的某一点作为该局部图的表示坐标,计算相邻识别结果之间的距离h=[(x2-x1)2+(y2-y1)2]0.5,其中x1、x2、y1、y2分别为两个相邻识别结果的横坐标和纵坐标,选择钢筋半径r作为判断阈值,如果h小于r,则认为其为重复结果,舍去其一;重复判断动作,删除所有重复结果,将剩余的识别结果输出为认定结果;
72、步骤7.7,对认定结果中的每个局部图进行ssim除误,将识别结果中的局部图逐一与反模板库中的每个反模板进行结构相似度计算;
73、
74、其中μx是x的平均值,μy是y的平均值,是x的方差,是y的方差,σxy是x和y的协方差,c1=0.0001l2,c2=0.0009l2是用来维持稳定的常数,l是像素值的动态范围;
75、将计算到的ssim值与ssim阈值进行比较,删除大于等于ssim阈值的结果,输出最终结果。
76、与现有技术相比本发明具有以下优点:
77、在硬件方面,本发明采用升降式遮光帘,既可以满足遮挡背景光的作用,还方便操作工随时观察设备运行情况,避免了传统遮光罩盲区过大的缺点;同时采集镜头、环形聚光灯可以在控制位置调节机构的调节下正对成捆钢筋的中心位置,避免了图像采集过程中钢筋之间出现相互遮挡、补光不均匀的情况。
78、在算法方面,本发明具有计算速度快、识别准确率高的优势,避免了传统算法图像粘连的问题,同时模板库的建立、优化过程易于操作,适用于复杂工业环境下的成捆钢筋计数。
- 还没有人留言评论。精彩留言会获得点赞!