一种基于生物阻抗的手术机器人触觉力反馈系统
本发明属于医疗器械中的手术机器人领域,涉及一种基于生物阻抗的手术机器人触觉力反馈系统。
背景技术:
1、手术机器人是集医学、机器学、生物力学及计算机科学等多学科于一体的医疗器械产品,借助微创手术和相关底层技术发展,能从视觉、听觉和触觉上为医生进行手术操作提供支持,被用于微创手术领域实现对手术器械的精准控制。机器人辅助手术与开放手术及传统微创伤手术相比,具有以下优势:①减少手术伤口、术后恢复快及较少术后并发症;②灵活的机械臂与高度复杂的手术兼容;③手术的精准度及手术结果的稳定性;④降低外科医生疲惫及缩短学习曲线;⑤减少辐射暴露等。
2、手术机器人在国内外的应用已表明其技术上的先进性,但同时也存在一些局限性,其中包括触觉力反馈体系的缺失,操作者只能通过视觉信息的反馈对触觉信息进行代偿,这增加了手术的不确定性和风险性,从而限制了手术机器人的进一步发展和应用。当前应用于临床的手术机器人大多采用视觉反馈系统,外科医生在控制机械臂进行手术时,不能对病人进行触诊。因此触觉力反馈的缺失,已经成为制约手术机器人发展的一大挑战。
3、而手术机器人的触觉力反馈系统,是将操作末端的运动、位置以及姿态等数据信息实时而准确地发送至核心处理器,并将数据通过显示系统和控制系统反馈给医生,使其得到真实的手术操作体验,保证机械手操作安全可靠。触觉力反馈不仅能够提供给机械臂合适的操作力,而且能够使医生感觉到软组织的质地、形态等不同特性,进而可以辨别出病理组织。具有触觉力反馈系统的手术机器人能够加强外科医生手术时的临场感,提高手术的安全性和精度。
4、人体的触觉感知是一个复杂的生物电信号反应的过程,要模拟人体的触觉反应,机械臂的触觉传感器也必须能够将软组织的质地、光滑程度以及形态等进行数字模拟处理。目前,leven等在机器人辅助腹腔镜下肝癌的手术治疗中,使用腔镜超声,成功获取了组织的触觉信息,并能够将这些信息以二维或三维的图像形式进行再现,但该技术能否广泛应用于其他手术有待进一步研究,且以图像再现触觉信息仍是视觉代偿的一种形式,不符合人体触觉感知的生理习惯。
技术实现思路
1、为了使手术机器人的机械臂获取触觉力反馈,加强外科医生的手术临场感,提高手术机器人手术的安全性和精度,本发明提出了一种基于生物阻抗的手术机器人触觉力反馈系统。
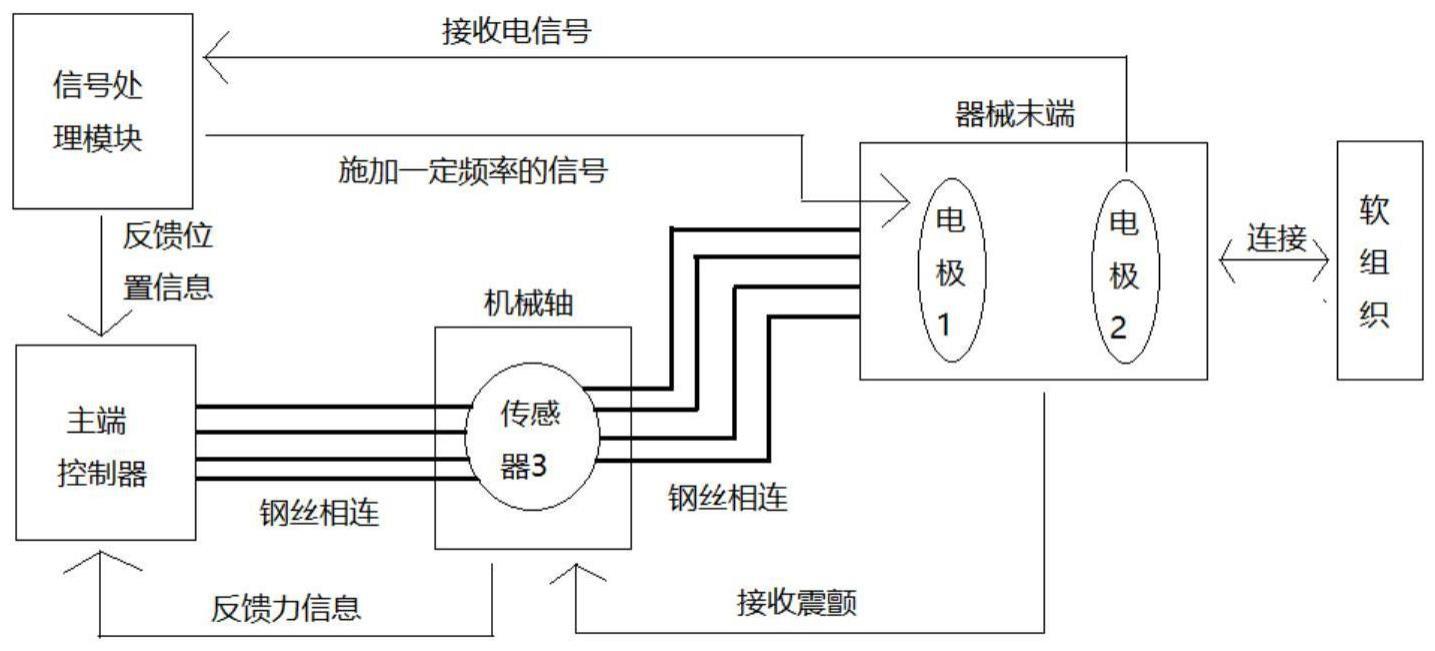
2、本发明提出的一种基于生物阻抗的手术机器人触觉力反馈系统,能通过给集成于器械末端的生物电检测电极施加不同频率的信号,信号处理模块获得电信号反馈后计算阻抗,即可判断出手术器械在组织间的位置,再将该位置信息反馈给医生,同时,通过机械轴靠近器械末端处的张力传感器获取器械末端的力信息反馈给医生,医生能同步获取手术器械的位置信息和在组织间的力信息,有助于其更加准确安全地完成手术。
3、本发明为解决触觉力反馈问题所采用的方案为:一种基于生物阻抗的手术机器人触觉力反馈系统,包括信号处理模块、传感器3、主端控制器、机械轴、机械臂器械末端;器械末端包括双电极结构,电极1采用皮下电极,能形成电势差尽可能小的电极/电解质溶液接界;电极2采用绝缘干电极;电极1的输入端连接到信号处理模块;电极2的输出端连接到信号处理模块;信号处理模块输出连接主端控制器;主端控制器、传感器3和器械末端之间用四根钢丝相连,器械末端还连接软组织;主端控制器通过钢丝控制器械末端的运动,传感器3测量钢丝因运动震颤而产生的张力,将该张力反馈给主端控制器,使操作医生获得手术器械在软组织中的力信息,主端控制器将获得的位置信息和力信息有效组合即可得到触觉力反馈。
4、进一步,电极1和电极2在器械末端的集成方式采用贴片式,分3层设置,层3为贴片基底层,在器械末端内部或电极1、电极2的底部;层2为电极1或电极2构成的电极层;最上层层1为绝缘遮挡层。
5、进一步,传感器3选用穿轴式张力传感器,用于检测钢丝运动产生的张力。
6、进一步,绝缘遮挡层选用柔性玻璃,高硬度和高气密性,防止电极受潮和漏电。
7、进一步,所述的钢丝最外层选用石墨烯包裹,防止电磁干扰。
8、本发明与已有技术和方法相比,有如下优点:
9、1、本发明涉及一种基于生物阻抗的手术机器人触觉力反馈系统,将机械臂的末端执行器在组织间的施力情况映射到主端控制器,还原医生在操作时的临场感受,从而降低手术风险,提高手术精度。
10、2、本发明涉及一种基于生物阻抗的手术机器人触觉力反馈系统,通过在机械轴靠近器械末端处集成力传感器,在机械臂的末端执行器加入双电极的方式来构成电流回路,提高集成程度。
11、3、本发明涉及一种基于生物阻抗的手术机器人触觉力反馈系统,通过张力传感器接收器械末端的震颤来直接获取末端执行器的力信息,节约改造成本。
技术特征:
1.一种基于生物阻抗的手术机器人触觉力反馈系统,其特征在于,包括信号处理模块、传感器3、主端控制器、机械轴、机械臂器械末端;
2.根据权利要求1所述的一种基于生物阻抗的手术机器人触觉力反馈系统,其特征在于,电极1和电极2在器械末端的集成方式采用贴片式,分3层设置,层3为贴片基底层,在器械末端内部或电极1、电极2的底部;层2为电极1或电极2构成的电极层;最上层层1为绝缘遮挡层。
3.根据权利要求1所述的一种基于生物阻抗的手术机器人触觉力反馈系统,其特征在于,传感器3选用穿轴式张力传感器,用于检测钢丝运动产生的张力。
4.根据权利要求2所述的一种基于生物阻抗的手术机器人触觉力反馈系统,其特征在于,绝缘遮挡层选用柔性玻璃,高硬度和高气密性,防止电极受潮和漏电。
5.根据权利要求1所述的一种基于生物阻抗的手术机器人触觉力反馈系统,其特征在于,所述的钢丝最外层选用石墨烯包裹,防止电磁干扰。
技术总结
本发明公开了一种基于生物阻抗的手术机器人触觉力反馈系统,包括信号处理模块、主端控制器、带张力传感器和双电极的末端执行器以及生物电阻抗双电极等效电路。双电极分别采用皮下电极和绝缘干电极,以贴片的方式集成到器械末端,其外层用一层薄的柔性玻璃包裹;皮下电极的输入端和绝缘干电极的输出端连接到信号处理模块。张力传感器选用穿轴式张力传感器,通过四根钢丝分别与主端控制器和器械末端相连,钢丝用石墨烯包裹屏蔽电磁干扰。本发明使操控主端控制器的医生在手术时获得器械末端的位置信息和力信息,提高力触觉反馈效果。
技术研发人员:王芳群,王丹妮,罗雅俊,虞文琪,郑书坤,陈思,杨智衡
受保护的技术使用者:江苏大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!