基于同步定位与建图的光声显微手术导航方法及系统
本发明属于计算机辅助医疗,具体涉及一种基于同步定位与建图的光声显微手术导航方法及系统。
背景技术:
1、光声显微成像是一种新兴的医学成像技术,通过非侵入的纳秒脉冲激光对组织的特异性激发来产生光声信号,通过不同组织的对激光的吸收差异实现成像,结合了光学成像的高分辨率与声学成像的深穿透特性。基于mri、ct等模态的手术导航方法在涉及血管的手术中,需注射造影剂,且存在血管分辨率差、电离辐射等问题。相比之下,光声显微成像无需造影即可高分辨地成像微血管等微小的生物组织结构,存在明显优势,因而逐渐被应用于手术导航领域,例如:肿瘤切除手术中,显示肿瘤边缘微血管网络,引导医生确定切缘;微整形手术中显示目标区域三维血管分布,引导针头避开面部动脉血管。
2、光声显微成像的时间与空间分辨率常常不可兼得。机械扫描式的光声显微成像通过二自由度电机沿固定轨迹扫描成像,具有卓越的分辨率,然而其较慢的成像速度,以及低自由度扫描方式带来的是在临床手术场景应用的困难性。新的基于mems、振镜或多边形扫描器的高速光声显微成像方法提供了几乎实时的成像速度,且该类系统更易于做到手持自由扫描,然而它们大多有着较小的视场,难以对病灶实现全局性的观察。而临床手术导航场景大多需要医学影像有足够的视场,能扫描整个区域以确定、识别组织的不同部分,对整体结构进行分析。
技术实现思路
1、发明目的在于针对现有技术不足,提出一种基于同步定位与建图的光声显微手术导航方法及系统,通过手持的自由扫描构建手术部位完整血管网络,实现光声显微手术导航在术中的实时成像扩展更新,可解决光声显微成像中成像视场小、扫描自由度低,以及术中成像更新难的问题。
2、为了达到上述目的,本发明采用以下技术方案:
3、第一方面,本发明提供了一种基于同步定位与建图的光声显微手术导航方法,包括下述步骤:
4、使用扫描仪对手术部位进行光声三维成像,光声信号由数据采集卡采集并实时载入系统;
5、对光声信号进行预处理后解算为三维点云数据,并对所述三维点云数据进行预处理;
6、根据前一帧与当前帧点云之间的三维结构信息进行点云匹配,并定位光声扫描仪的位姿;所述点云匹配包括粗匹配与精匹配,所述粗匹配使用ndt算法,所述精匹配使用point-to-plane icp算法,粗匹配计算得到的位姿矩阵作为精匹配的初始位姿,在此基础上进一步迭代得到两帧点云间的精确相对位姿以及扫描仪位姿;
7、根据估算的扫描仪移动速度进行运动畸变矫正;
8、将光声模态的血管形态先验加入图优化中,提高血管网络构建的全局一致性;
9、构建或更新可用于术中导航的大视场三维光声血管网络。
10、作为优选的技术方案,使用扫描仪对手术部位进行光声三维成像时,纳秒脉冲激光经扫描仪中的二自由度旋转的振镜组或多边形镜组的反射到达手术部位,产生光声回波信号被超声换能器接收并由数据采集卡采集,光声信号、时间戳、与扫描角度信息被实时载入系统。
11、作为优选的技术方案,
12、所述光声信号预处理具体为:
13、使用一维的滑动窗口均值滤波,平滑噪声干扰,定义滑动窗口宽度,将滑动窗口置于信号开头并对窗口内所有信号采样点数值求和,结果除以窗口宽度,所得均值作为滤波后的新值,之后窗口滑动并重复滤波计算,直到滑动到信号末尾;
14、信号取包络,提高信号的质量与可靠性,计算原信号的希尔伯特变换,原信号作为实部、希尔伯特变换后的信号作为虚部,构建解析信号,计算解析信号的模,即为原信号的包络;
15、所述光声信号解算为三维点云数据具体为:
16、由数据采集卡采样周期与信号上每个采样点的索引求得信号上每个采样点的采样时间,由每个采样点的采样时间与超声在组织中的传播速度求得采样点所在深度,由每个采样点的深度与扫描旋转角度可解算为三维点云数据,其中每个点包含了三维坐标信息与强度信息,一次完整扫描采集的所有光声信号转换的三维点集为一帧点云。
17、作为优选的技术方案,对所述三维点云数据进行预处理包括剔除离群点和降采样;
18、剔除离群点时,统计点云中每个点周围半径50μm内的其它点数量,若少于阈值10,则判定该点为无法提供有效血管结构信息的离群点,予以剔除;所述半径与阈值参数可根据手术部位血管形态调整;
19、所述降采样在扫描轴向上对点云进行最大值投影,保留点云中最能表征血管表面轮廓结构信息的点,提高后续定位与建图运算速度,同时保证精度;所述降采样得到的点云数据与未降采样的完整点云数据同时保存于系统中,降采样点云数据将用于后续的帧间匹配、全局优化,未降采样的完整点云数据将用于三维光声血管网络构建。
20、作为优选的技术方案,所述粗匹配具体为:
21、将点云划分立方体网格,计算网格内的均值、协方差矩阵;当前帧点云根据相对位姿的初始估计变换到前一帧点云坐标系下,通过联合概率计算匹配程度;优化匹配概率,求解最优的相对位姿矩阵;
22、所述精匹配具体为:
23、粗匹配计算得到的位姿矩阵作为迭代的初始变换矩阵;搜索两帧点云的最近点,形成匹配,计算其法向量;当前帧点云通过变换矩阵变换到前一帧点云坐标系下,计算每个点到匹配点局部平面的距离,作为残差;通过最小化残差的平方和,求解最优的相对位姿矩阵;不断迭代优化,直到相对位姿矩阵小于阈值m;得到帧间匹配的最佳位姿矩阵,同时实现对光声扫描仪的定位。
24、作为优选的技术方案,所述的运动畸变矫正中,点云精匹配得到的帧间相对位姿矩阵对时间求导得到扫描仪平均移动速度jocobian矩阵,进而推算帧内每个点的运动距离,并将其重映射到对应的位置,得到矫正运动畸变后的点云帧后,再重新进行帧间匹配,修正匹配结果。
25、作为优选的技术方案,所述光声模态的血管形态先验加入图优化,将所有扫描仪位姿和血管脉络信息表示为一个图结构,其中节点表示扫描仪位姿估计或点云位置,边表示它们之间的关系和约束,添加光声成像的血管形态先验约束条件,构建最小二乘问题,用gauss-newton算法解决优化问题。
26、作为优选的技术方案,所述光声成像的血管形态先验约束条件,为基于hessian矩阵的光声模态下的血管形态过滤,hessian矩阵计算血管结构的曲率、方向等特征,可区分线状的血管结构与非线状的其它结构,算法将使用这些约束来优化估计,从而提高血管网络构建的准确性。
27、作为优选的技术方案,所述构建或更新可用于术中导航的大视场三维光声血管网络,由优化的结果,融合点云帧,构建或更新大视场的三维光声血管网络。
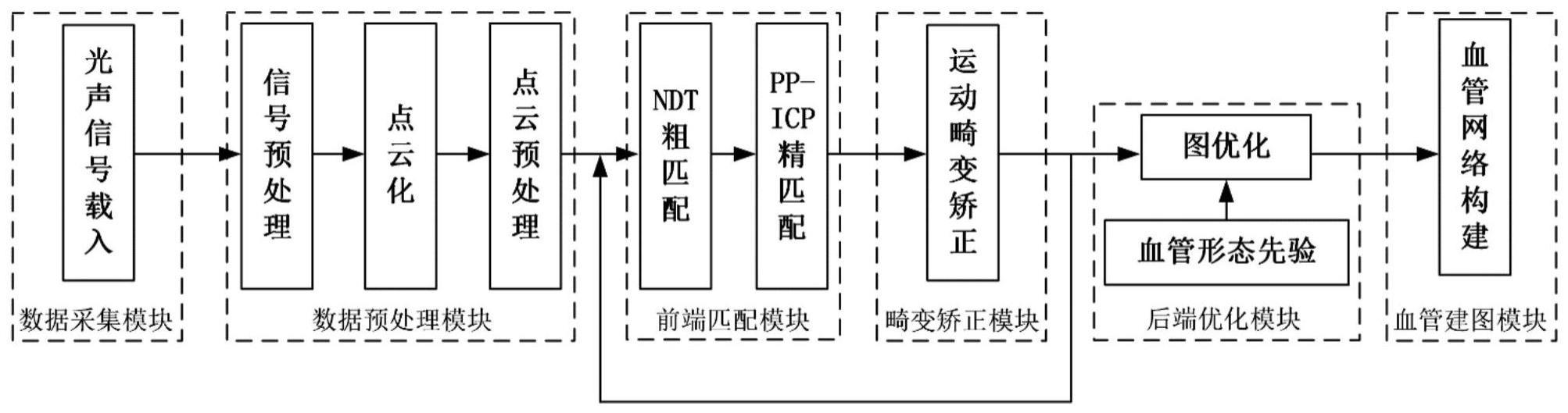
28、第二方面,本发明提供了一种基于同步定位与建图的光声显微手术导航系统,用于实现所述的基于同步定位与建图的光声显微手术导航方法,包括数据采集模块、数据预处理模块、前端匹配模块、运动畸变矫正模块、后端优化模块以及血管建图模块;
29、所述数据采集模块,用于使用扫描仪对手术部位进行光声三维成像,光声信号由数据采集卡采集并实时载入系统;
30、数据预处理模块,用于对光声信号进行预处理后解算为三维点云数据,并对所述三维点云数据进行预处理;
31、所述前端匹配模块,用于根据前一帧与当前帧点云之间的三维结构信息进行点云匹配,并定位光声扫描仪的位姿;所述点云匹配包括粗匹配与精匹配,所述粗匹配使用ndt算法,所述精匹配使用point-to-plane icp算法,粗匹配计算得到的位姿矩阵作为精匹配的初始位姿,在此基础上进一步迭代得到两帧点云间的精确相对位姿以及扫描仪位姿;
32、所述运动畸变矫正模块,用于根据估算的扫描仪移动速度进行运动畸变矫正;
33、所述后端优化模块,用于将光声模态的血管形态先验加入图优化中,提高血管网络构建的全局一致性;
34、所述血管建图模块,用于构建或更新可用于术中导航的大视场三维光声血管网络。
35、本发明与现有技术相比,具有如下优点和有益效果:
36、1、本发明方法与系统主要应用于光声显微成像的手术导航中,针对现有光声显微成像扫描自由度低、成像视场小而难以对病灶实现全局性的观察的问题,采用了基于同步定位与建图的方法定位扫描仪位姿、构建大视场的三维光声血管网络,实现了可手持扫描仪自由扫描的、可术中实时更新扩展视场的光声显微成像,提高了光声显微成像的临床应用价值,为手术导航提供了新的解决方案。
37、2、本发明利用光声点云的最大值投影进行帧间匹配,将庞大的点云数据有效缩减,保留点云中血管结构关键信息同时滤除无效信息,极大地缩减计算量与存储空间需求,使后续匹配、优化处理更高效、更准确,系统更为轻便,易于术中使用。
38、3、本发明利用加入了血管形态先验的图优化,利用hessian矩阵计算光声模态下的血管结构的曲率、方向等特征,区分点云中线状的血管结构与非线状的其它结构,作为光声成像的血管形态先验约束条件,得到精确、全局一致的光声血管网络,有助于提高手术的精准性和安全性。
- 还没有人留言评论。精彩留言会获得点赞!