膝关节手术机器人和控制方法与流程
本技术涉及医疗,具体而言,涉及一种膝关节手术机器人和控制方法。
背景技术:
1、在骨科手术中,膝关节置换手术往往需要对膝关节的股骨和胫骨进行截骨操作,需要将机器人放置在手术床边的指定位置,等待进行手术作业。
2、但是膝关节手术机器人往往体积过大,受限制于手术室的空间大小,会过多的占用手术室的空间。另外不同的病人体型存在不同,往往机器人在适应不同的手术病人时需要再次调整机器人的姿态。不同的病人在做手术时的姿态也不同,截骨量也存在差异,因此根据术前规划,需要机器人根据不同的病人的截骨量进而调整不同的姿态,针对根据病人的姿态反推调整机器人姿态的算法的精度对手术具有很严重的影响。然后现有的膝关节手术机器人的定位准确度比较低,难以满足膝关节手术的需求。
3、针对相关技术中膝关节手术机器人定位准确度比较低的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本技术的主要目的在于提供一种膝关节手术机器人和控制方法,以解决相关技术中膝关节手术机器人定位准确度比较低的问题。
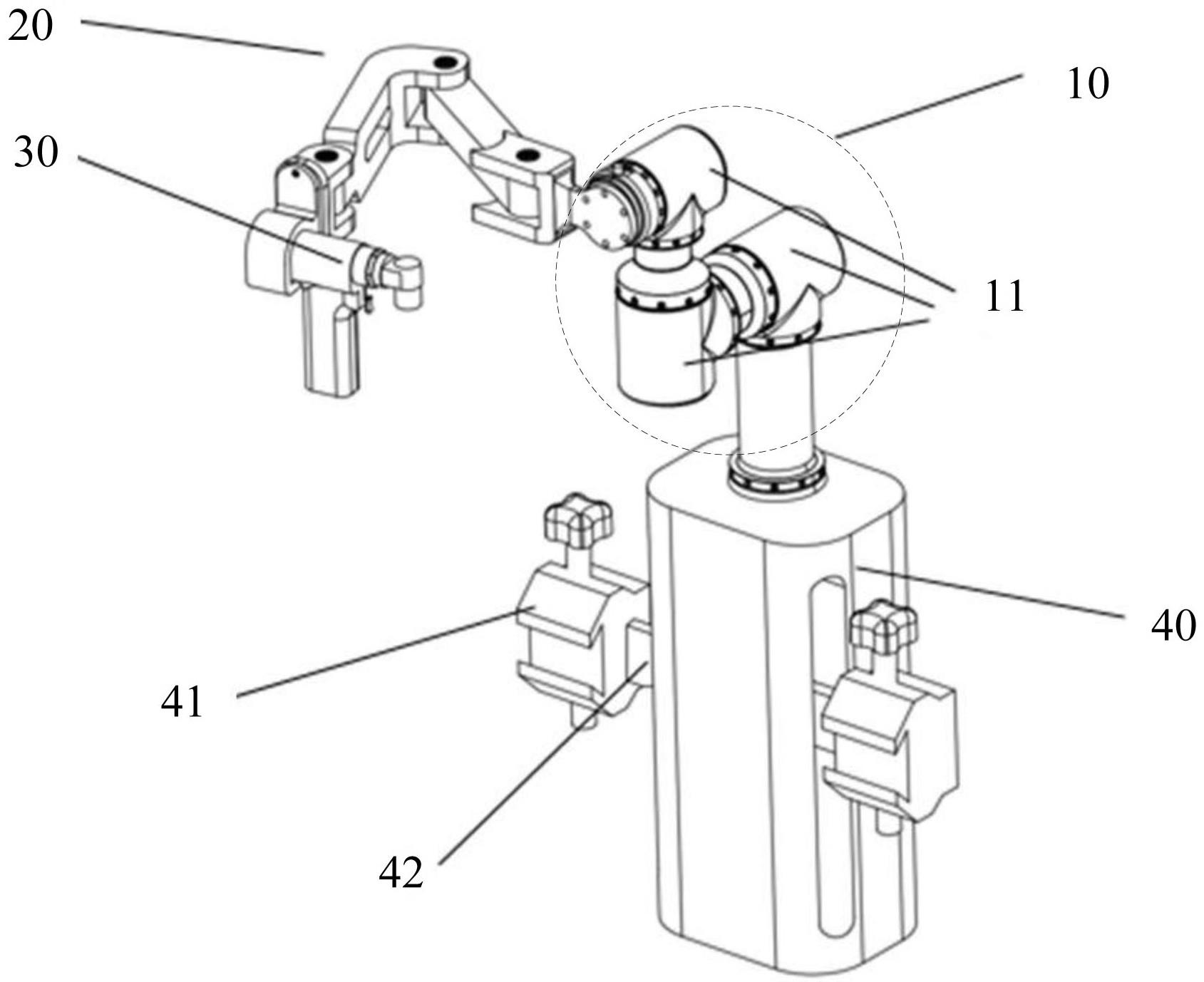
2、为了实现上述目的,根据本技术的一个方面,提供了一种膝关节手术机器人,该膝关节手术机器人包括:机械臂,所述机械臂的末端与铰链机构的一端连接,其中,所述机械臂用于将所述铰链机构转动至预设的目标平面;所述铰链机构,所述铰链机构的另一端与摆锯连接,其中,所述铰链机构在所述目标平面内移动,以将所述摆锯移动至目标位置;摆锯,其中,所述摆锯用于在所述目标位置执行切割操作;其中,依据所述预设的目标平面和逆解算法进行计算,得到所述机械臂的目标转动角度,并依据所述目标转动角度控制所述机械臂转动,以将所述铰链机构转动至所述目标平面。
3、进一步地,所述机械臂还包括:关节模组,其中,所述关节模组包括多个关节,每个关节包括电机和控制装置,所述控制装置用于将所述目标转动角度转换为所述电机的控制参数,以通过所述电机控制所述机械臂的多个关节进行转动。
4、进一步地,所述关节模组中的每个关节还包括:状态检测装置,其中,所述状态检测装置用于检测每个关节是否转动至所述目标转动角度对应的位置。
5、进一步地,所述关节模组包括:第一关节、第二关节和第三关节,其中,控制所述第一关节、所述第二关节和所述第三关节转动,以将所述铰链机构转动至所述目标平面。
6、进一步地,述铰链机构还包括:第一铰链连杆、第二铰链连杆、第三铰链连杆和第四铰链连杆,其中,所述第一铰链连杆和所述机械臂的末端法兰连接,所述第一铰链连杆、所述第二铰链连杆、所述第三铰链连杆和所述第四铰链连杆之间活动连接,所述第四铰链连杆的末端与所述摆锯连接,通过所述第一铰链连杆、所述第二铰链连杆、所述第三铰链连杆和所述第四铰链连杆将所述摆锯移动至目标位置。
7、进一步地,所述第一铰链连杆、所述第二铰链连杆、所述第三铰链连杆和所述第四铰链连杆之间使用的转轴为可调阻尼转轴。
8、进一步地,所述膝关节手术机器人还包括:升降装置,所述升降装置与所述机械臂的首端连接,其中,所述升降装置用于对所述机械臂的高度进行调整。
9、进一步地,所述升降装置还包括:锁紧旋钮和固定横杆,其中,所述锁紧旋钮和所述固定横杆用于将所述升降装置固定在手术床。
10、为了实现上述目的,根据本技术的一个方面,提供了一种膝关节手术机器人的机械臂的控制方法。该方法包括:通过固定在机械臂上的第一标记工具获取所述机械臂的第一坐标信息;获取预设的目标平面,并依据固定在目标对象上的第二标记工具获取所述目标对象的第二坐标信息;依据所述第二坐标信息将所述预设的目标平面进行转换,得到转换后的目标平面;通过逆解算法对所述第一坐标信息和所述转换后的目标平面进行计算,得到目标转动角度,并依据所述目标转动角度控制所述机械臂转动。
11、进一步地,通过逆解算法对所述第一坐标信息和所述转换后的目标平面进行计算,得到目标转动角度包括:依据所述机械臂的第一坐标信息获取第一关节的第一初始dh参数、第二关节的第二初始dh参数和第三关节的第三初始dh参数,其中,所述机械臂由所述第一关节、所述第二关节和所述第三关节组成;依据所述第一初始dh参数、所述第二初始dh参数和所述第三初始dh参数构建坐标转换矩阵,得到第一坐标转换矩阵,其中,所述第一坐标转换矩阵为所述机械臂上的预设基准点至所述第三关节的坐标旋转矩阵;依据所述第三关节相对于所述预设基准点的姿态变化值和所述转换后的目标平面相对于所述预设基准点的坐标变化值构建坐标转换矩阵,得到第二坐标转换矩阵,其中,所述第二坐标转换矩阵为所述第三关节至所述预设基准点的坐标旋转矩阵;依据所述第一坐标转换矩阵、所述第二坐标转换矩阵和所述转换后的目标平面进行逆解运算,得到所述机械臂的目标转动角度。
12、进一步地,依据所述第一初始dh参数、所述第二初始dh参数和所述第三初始dh参数构建坐标转换矩阵,得到第一坐标转换矩阵包括:依据所述第一初始dh参数进行计算,得到所述预设基准点至所述第一关节的坐标旋转矩阵;依据所述第二初始dh参数进行计算,得到所述第一关节至所述第二关节的坐标转换矩阵;依据所述第三初始dh参数进行计算,得到所述第二关节至所述第三关节的坐标转换矩阵;依据所述预设基准点至所述第一关节的坐标旋转矩阵、所述第一关节至所述第二关节的坐标转换矩阵和所述第二关节至所述第三关节的坐标转换矩阵进行计算,得到所述第一坐标转换矩阵。
13、进一步地,依据所述第一坐标转换矩阵、所述第二坐标转换矩阵和所述转换后的目标平面进行逆解运算,得到所述机械臂的目标转动角度包括:对所述第一坐标转换矩阵和所述第二坐标转换矩阵进行联立求解,得到目标转动角度的表达式;获取所述转换后的目标平面对应的姿态数据信息,并将所述姿态数据信息代入所述目标转动角度的表达式中,得到所述目标转动角度。
14、为了实现上述目的,根据本技术的另一方面,提供了一种膝关节手术机器人的机械臂的控制装置。该装置包括:第一获取单元,用于通过固定在机械臂上的第一标记工具获取所述机械臂的第一坐标信息;第二获取单元,用于获取预设的目标平面,并依据固定在目标对象上的第二标记工具获取所述目标对象的第二坐标信息;转换单元,用于依据所述第二坐标信息将所述预设的目标平面进行转换,得到转换后的目标平面;计算单元,用于通过逆解算法对所述第一坐标信息和所述转换后的目标平面进行计算,得到目标转动角度,并依据所述目标转动角度控制所述机械臂转动。
15、进一步地,所述计算单元包括:获取模块,用于依据所述机械臂的第一坐标信息获取第一关节的第一初始dh参数、第二关节的第二初始dh参数和第三关节的第三初始dh参数,其中,所述机械臂由所述第一关节、所述第二关节和所述第三关节组成;第一构建模块,用于依据所述第一初始dh参数、所述第二初始dh参数和所述第三初始dh参数构建坐标转换矩阵,得到第一坐标转换矩阵,其中,所述第一坐标转换矩阵为所述机械臂上的预设基准点至所述第三关节的坐标旋转矩阵;第二构建模块,用于依据所述第三关节相对于所述预设基准点的姿态变化值和所述转换后的目标平面相对于所述预设基准点的坐标变化值构建坐标转换矩阵,得到第二坐标转换矩阵,其中,所述第二坐标转换矩阵为所述第三关节至所述预设基准点的坐标旋转矩阵;计算模块,用于依据所述第一坐标转换矩阵、所述第二坐标转换矩阵和所述转换后的目标平面进行逆解运算,得到所述机械臂的目标转动角度。
16、进一步地,所述第一构建模块包括:第一计算子模块,用于依据所述第一初始dh参数进行计算,得到所述预设基准点至所述第一关节的坐标旋转矩阵;第二计算子模块,用于依据所述第二初始dh参数进行计算,得到所述第一关节至所述第二关节的坐标转换矩阵;第三计算子模块,用于依据所述第三初始dh参数进行计算,得到所述第二关节至所述第三关节的坐标转换矩阵;第四计算子模块,用于依据所述预设基准点至所述第一关节的坐标旋转矩阵、所述第一关节至所述第二关节的坐标转换矩阵和所述第二关节至所述第三关节的坐标转换矩阵进行计算,得到所述第一坐标转换矩阵。
17、进一步地,所述计算模块包括:求解子模块,用于对所述第一坐标转换矩阵和所述第二坐标转换矩阵进行联立求解,得到目标转动角度的表达式;处理子模块,用于获取所述转换后的目标平面对应的姿态数据信息,并将所述姿态数据信息代入所述目标转动角度的表达式中,得到所述目标转动角度。
18、通过本技术,采用:机械臂,机械臂的末端与铰链机构的一端连接,其中,机械臂用于将铰链机构转动至预设的目标平面;铰链机构,铰链机构的另一端与摆锯连接,其中,铰链机构在目标平面内移动,以将摆锯移动至目标位置;摆锯,其中,摆锯用于在目标位置执行切割操作;其中,依据预设的目标平面和逆解算法进行计算,得到机械臂的目标转动角度,并依据目标转动角度控制机械臂转动,以将铰链机构转动至目标平面,解决了相关技术中膝关节手术机器人定位准确度比较低的问题。在本方案中,膝关节手术机器人由机械臂、铰链机构和摆锯组成,具有体积小,活动灵活,易于调整范围的优点,再者在对膝关节手术机器人进行控制时,根据预设的目标平面和逆解算法来准确地得到机械臂的目标转动角度,进而达到了提高膝关节手术机器人定位准确度的效果。
- 还没有人留言评论。精彩留言会获得点赞!