导引鞘管、其制作方法及其定位方法与流程
本发明涉及医疗器械的,具体涉及一种导引鞘管、其制作方法及其定位方法。
背景技术:
1、随着自然腔道内肿瘤的发病率增加,尤其是肺部疾病不断上升,对于导引鞘管在人体内的应用也随之提高,所需的导引鞘管的定位精度和实施形态要求更高。
2、目前对于导引鞘管的定位方式,一般是采用定位导线穿到指引鞘管中,按照术前规划好的路线,根据对定位导线的实时导航信息随导引鞘管一起进入到目标病变位置附近,然后把定位导线撤出,导引鞘管留在体内并保持位置不变,再通过导引鞘管插入活检器械进行病灶组织取样或者切除。
3、但由于患者的呼吸等多种因素,手术中导引鞘管的实际位置会出现偏移,医护人员无法直观的判断导引鞘管的位置是否准确,从而导致无法精准的将活检器械引导至目标病灶位置,增大了活检或者切除的难度,手术成功率较低。
技术实现思路
1、因此,为了解决现有技术中在撤出定位导线后无法准确判断导引鞘管位置的缺陷,本发明提供一种导引鞘管、其制作方法及其定位方法。
2、第一方面,本发明提供的导引鞘管采用如下的技术方案:
3、一种导引鞘管,其包括:
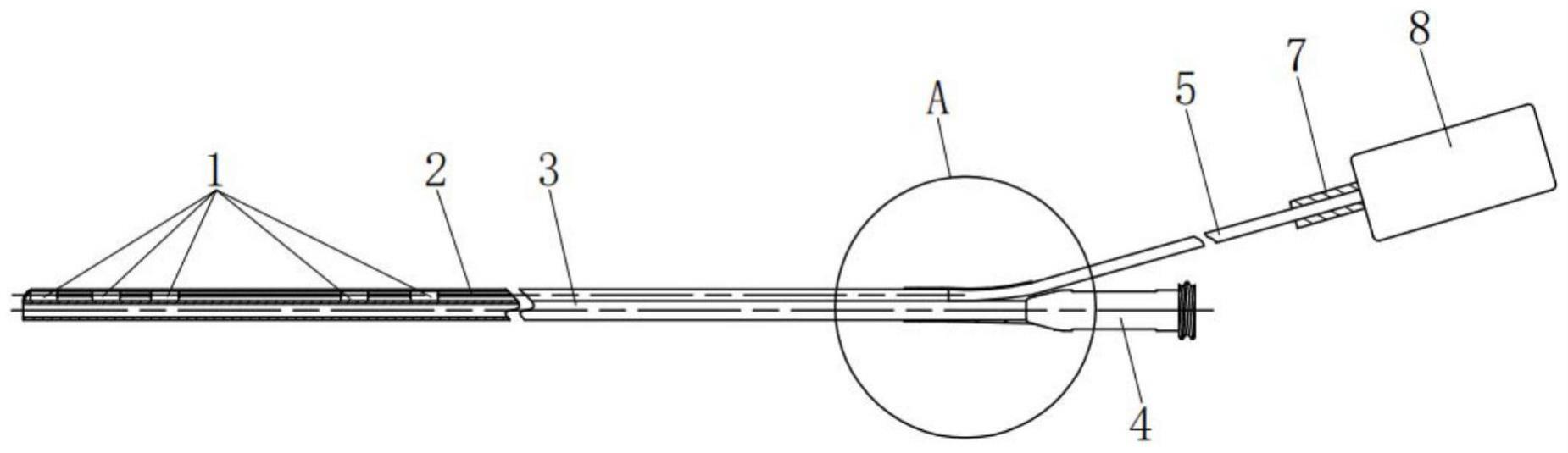
4、管体,其内部具有第一腔道和第二腔道,所述第一腔道的两端均开口设置;
5、定位传感器,设有多组并间隔布置在所述第二腔道内,每组至少包括两个所述定位传感器;
6、定位导线,穿设在所述第二腔道内,并与所有的所述定位传感器连接,其一端延伸至第二腔道外侧并连接有导线插头,所述导线插头用于连接在主机上,以将各组所述定位传感器获取的位置信息传输至主机内,得到所述定位导线的实时形态。
7、可选地,所述定位传感器设有三组,三组所述定位传感器分别安装在所述管体的近端、中部和远端三个部位。
8、可选地,所述导引鞘管还包括导线外管,所述导线外管的一端连接在所述管体的近端,并与所述第二腔道内部连通,所述导线外管的另一端连接在所述导线插头上,所述定位导线位于第二腔道外侧的部位穿设在所述导线外管内。
9、可选地,所述导引鞘管还包括鞘管座,所述鞘管座连接在管体的近端并与所述第一腔道连通。
10、可选地,所述导引鞘管还包括第一加强件,所述第一加强件包覆在所述导线外管和所述鞘管座与所述管体的连接处。
11、可选地,所述导引鞘管还包括第二加强件,所述第二加强件包覆在所述导线接头与所述导线外管的连接处。
12、第二方面,本发明提供的对上述的导引鞘管的制作方法,采用如下的技术方案:
13、一种导引鞘管的制作方法,其包括如下步骤:
14、制作所述管体,使所述第一腔道和所述第二腔道两端均开口设置,并使第一腔道的长度大于第二腔道的长度,在第二腔道的近端开口处形成端面;
15、安装所述定位传感器,将各所述定位传感器在所述第二腔道内的对应位置处,使与所有定位传感器相连接的所述定位导线从所述第二腔道的近端开口伸出,再对所有的所述定位传感器位置进行固定;
16、安装所述导线外管,将所述导线外管穿过定位导线位于第二腔道外侧的部位,并使导线外管的一端抵靠在第二腔道近端的端面上,对导线外管与第二腔道近端的连接处进行加热焊接;
17、安装所述鞘管座,将所述鞘管座套设在第一腔道近端的外壁上,并使用胶水粘接固定;
18、安装所述第一加强件,将所述第一加强件套设在导线外管和鞘管座与管体近端的连接处,并加热所述第一加强件使其收缩后包覆在连接处;
19、连接所述导线接头,将所述定位导线位于导线外管外侧的一端连接在导线接头上,并将导线外管的端部插接在导线接头上;
20、安装所述第二加强件,将所述第二加强件包覆在导线接头与导线外管的连接处,并加热所述第二加强件使其收缩后包覆在连接处。
21、可选地,所述对所有的定位传感器位置进行固定的方法包括:
22、在管体对应每个定位传感器的位置套设热缩管或硅胶管,对热缩管或硅胶管进行加热,使热缩管或硅胶管收缩在管体外壁上,各定位传感器的位置固定后去除热缩管或硅胶管。
23、另一方面,本发明提供的对上述的导引鞘管的定位方法,其采用如下的技术方案:
24、一种导引鞘管的定位方法,所述定位方法包括如下步骤:
25、将所述管体划分为近端段、中部段和远端段,每段管体内均设有一组所述定位传感器;
26、采用多项式曲线拟合获取管体各段的三维形态,管体各段的三维形态pcatheter(x,y,z)为:
27、
28、其中,n为多项式阶数,对于远端段采用nf阶多项式拟合,nf≥3,对于中部段采用nm阶多项式拟合,nm≥2,对于近端段采用nn阶多项式拟合,nn≥2;
29、psensor(x,,)为当前时刻的各个定位传感器的位置数据;
30、p0为位姿的常数项;
31、wk为要求解的多项式系数;
32、将各段连接并对连接处进行平滑处理,获得所述导引鞘管的三维形态。
33、可选地,所述对管体各连接段的连接处进行平滑处理的方法包括:
34、位于所述远端段内的多个定位传感器沿着逐渐靠近所述中部段的方向依次设为sf1~sfp;位于所述中部段内的多个定位传感器沿着逐渐靠近所述近端段的方向依次设为sm1~smq;位于所述近端段内的多个定位传感器沿着逐渐背离所述中部段的方向依次设为sn1~snt;
35、对所述中部段和所述远端段的连接处,对定位传感器sfp~sm1的位置数据进行nfm阶平滑处理,nm≤nfm≤nf;
36、对所述中部段和所述近端段的连接处,对定位传感器smq~sn1的位置数据采用nmn阶平滑处理,nn≤nmn≤nm。
37、可选地,在对所述管体的形态初步定位后,在获取所述管体各段的三维形态后,对所述中部段和所述近端段进行形态修正,所述形态修正的方法包括:
38、判断所述管体是否移动,若所述管体处于移动状态,获取第一预设时间内同一时刻中部段和近端段上所有的定位传感器的数据,若所述管体处于静止状态,分别选取中部段和近端段在第二预设时间内的所有定位传感器的数据;
39、对所述中部段进行遍历nm阶多项式曲线拟合,nm的取值范围为常数2~5;
40、对所述近端段进行遍历nn阶多项式曲线拟合,nn的取值范围为常数2~5;
41、根据对所述中部段和所述近端段的遍历拟合结果,选取拟合结果误差最小的阶数作为所述中部段和所述近端段修正后的三维形态。
42、可选地,所述判断管体是否移动的方法包括:
43、获取位于远端段中的定位传感器的数据在第三预设时间内的变化量;
44、若所述变化量超过预设阈值,则管体处于移动状态;
45、若所述变化量未超过预设阈值,则管体处于静止状态。
46、本发明技术方案,具有如下优点:
47、1.本发明提供的导引鞘管,利用第二腔道内部的多组定位传感器,通过对各组定位传感器获取的位置信息,可得到定位导线的实时形态,从而获得管体在自然腔道内的准确位置信息,再使手术器械通过第一腔道准确顺利的送入病变部位,降低了手术难度,提高手术的成功率。
48、2.本发明提供的导引鞘管,利用导线外管保护定位导线位于第二腔道外侧的部位,避免对定位导线造成损伤而影响定位精度;并且,用过第一加强件和第二加强件对各连接部位进行保护,使各连接部位不易弯折断裂,提高导引鞘管的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!