一种智能调节的下肢关节训练装置
本发明属于下肢关节活动度训练,具体涉及一种智能调节的下肢关节训练装置。
背景技术:
1、关节活动范围是指关节活动时所通过的运动弧。由于各种原因导致关节周围纤维组织挛缩与粘连,可使关节活动范围障碍,影响肢体功能。关节活动度训练的目的是运用多种康复训练的方法增加或维持关节活动范围,提高肢体运动能力。关节活动度训练包括主动关节活动度训练和被动关节活动度训练,主动关节活动训练适用于骨关节术后康复期,脑血管疾病后遗症偏瘫患者,以及各种原因导致的下肢力量减弱、关节活动度降低等,被动关节活动度训练是指患者不能主动活动,如昏迷、完全卧床等;为避免关节挛缩、肌肉萎缩、骨质疏松和心肺功能降低等并发症需进行被动训练,主动关节活动导致明显疼痛的患者也需进行被动活动。
2、现有技术中的关节活动装置可以实现的运动方式较为单一,一般只能进行蹬腿(骑自行车式)锻炼,运动阻尼不可调节,而不同的患者关节的活动度不同,导致训练效果不佳,且该运动方式只能锻炼到膝关节,对于踝关节和髋关节的锻炼一般只能由康复师通过人力进行,通过康复师人力进行关节活动度训练虽然可以对各个下肢关节都进行训练,且可以根据患者关节的活动度的情况对患者进行训练,训练效果较好,但是通过人工进行抬腿弯腿等训练非常费力,且训练时间较长,对于一般患者训练时间为30-40分钟,对于关节较为僵硬的患者则需要1个小时左右,对康复师的体力要求较高,一般超过四十岁的康复师便无法完成该训练了,因此有必要进行改进。
技术实现思路
1、针对现有技术中的问题,本发明提供了一种智能调节的下肢关节训练装置,拟解决现有技术中通过人工进行抬腿弯腿等训练非常费力,且训练时间较长对康复师的身体健康造成影响的问题。
2、本发明采用的技术方案如下:
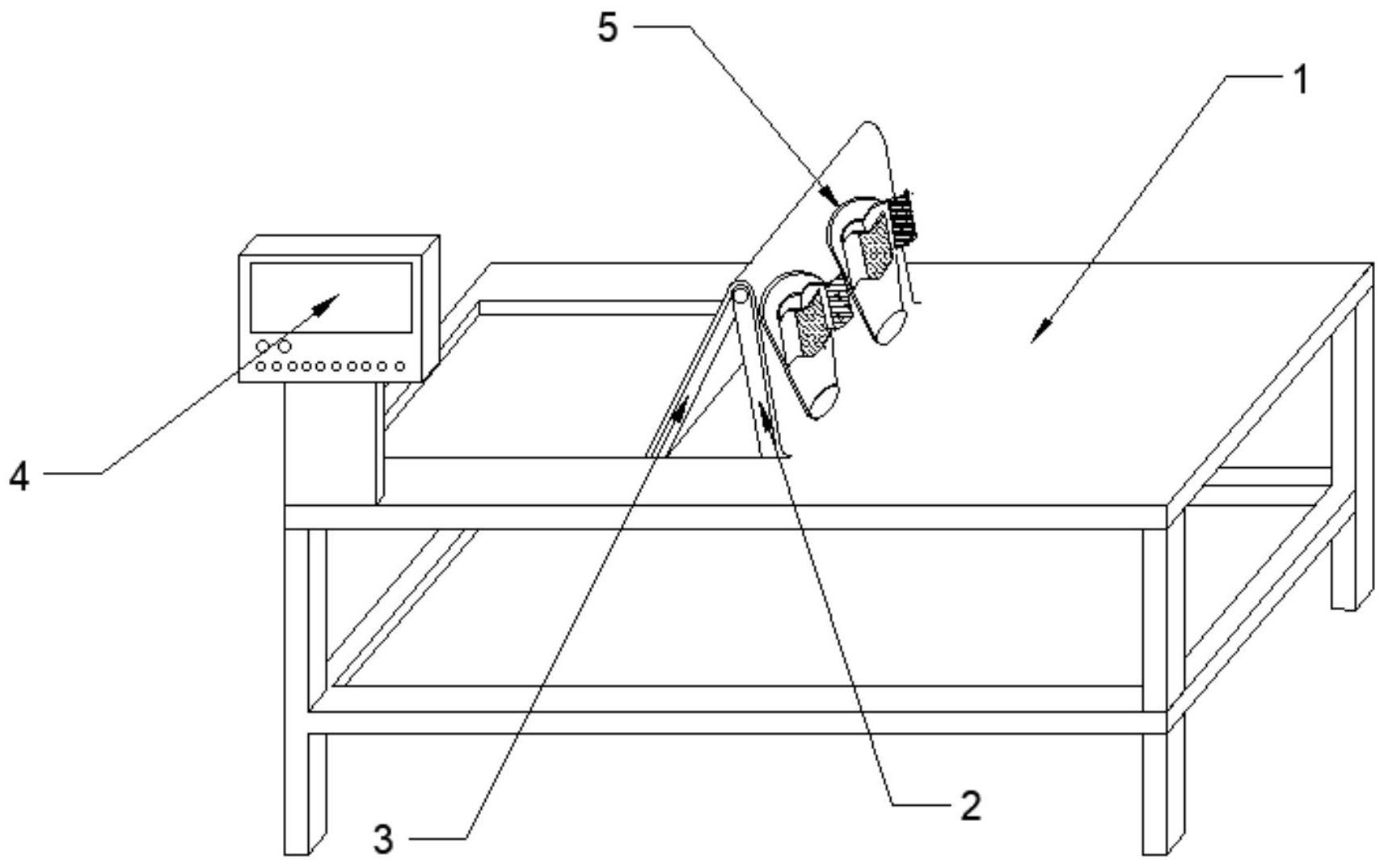
3、一种智能调节的下肢关节训练装置,包括床体,所述床体上设置有大腿固定板,所述大腿固定板的一侧与床体转动连接,所述大腿固定板与床体传动连接的相对侧转动连接有小腿固定板,所述小腿固定板与大腿固定板通过第一转动机构转动连接,所述大腿固定板与床体通过第二转动机构转动连接,所述大腿固定板和小腿固定板上设置有用于带动下肢在大腿固定板和小腿固定板所在平面转动的旋转机构,所述下肢关节训练装置还包括踝关节训练装置和控制终端,所述第一转动机构、第二转动机构、旋转机构和踝关节训练装置上均设置有角度检测机构,所述角度检测机构、第一转动机构、第二转动机构和踝关节训练装置与所述控制终端电连接。
4、采用该技术方案后,大腿固定板转动可以带动患者大腿向上半身的一侧转动,转动角度可控,可以根据患者的实际情况调节强度,从而达到活动髋关节的训练效果,大腿固定板与小腿固定板之间的转动配合大腿固定板与床体的转动可以带动患者做屈膝运动,小腿固定板远离大腿固定板的一侧与大腿固定板的距离越近,屈膝角度越大,适用于不同关节活动度的患者使用,膝关节、髋关节和踝关节的训练可单独进行,适合各种病情的患者使用,通过装置替代现有技术中康复师人工进行抬腿弯腿等训练,训练方式较为全面,降低了康复师的工作强度。
5、作为优选,所述踝关节训练装置包括两个结构相同的踝关节训练机构,所述踝关节训练机构包括底板,所述底板上固定设置有脚套,所述脚套包括伸入口,所述底板远离所述伸入口的一侧通过第三转动机构转动连接有训练板,所述训练板上设置有第三转动板,所述脚套与第三转动板相连,所述第三转动板为扇形结构,所述第三转动板通过第四转动机构在所述训练板所在平面转动,所述第三转动机构和第四转动机构与控制终端电连接。
6、采用该技术方案后,患者将脚伸入脚套内固定,通过训练板和底板的转动可以带动患者脚部向前倾斜或向后倾斜,通过第三转动板的转动,可以带动踝关节左右转动,运动方式较为完善。
7、作为优选,所述第三转动机构包括与底板转动连接的第三转轴,所述第三转轴与所述训练板固定连接,第三转轴连接有固定设置在底板上的第三驱动电机,所述角度检测机构设置在第三转轴上,所述角度检测机构为第三角度传感器,所述第三驱动电机和第三角度传感器与控制终端电连接。
8、采用该技术方案后,第三驱动电机转动带动第三转轴转动,从而带动与第三转轴固定连接的训练板转动,通过第三角度传感器检测第三转轴的转动角度,并将信息反馈给控制终端。
9、作为优选,所述第一转动机构和第二转动机构与第三转动机构结构相同。
10、作为优选,所述第三转动板靠近所述第三转动板圆心的一端固定连接有连接套,所述第四转动机构包括第四驱动电机,所述连接套上设置有角度检测机构,所述角度检测机构为第四角度传感器,所述第四驱动电机和第四角度传感器与所述控制终端电连接。
11、采用该技术方案后,第四驱动电机转动带动第三转动板在训练板所在平面转动,从而带动踝关节左右转动。
12、作为优选,所述旋转机构包括转动连接在小腿固定板上的两个第一转动板,两个所述第一转动板上均设置有小腿固定机构,所述大腿固定板上转动连接有两个第二转动板,两个所述第二转动板上均设置有大腿固定机构,两个第一转动板或两个第二转动板上分别设置有第五转动机构和第六转动机构,所述第五转动机构和第六转动机构与所述第四转动机构结构相同。
13、作为优选,所述小腿固定机构包括两个分别设置在两个第一转动板上的第三固定带,两个所述第三固定带的两端均设置有相配合的魔术贴组,所述大腿固定机构包括两个分别设置在两个第二转动板上的第四固定带,两个所述第四固定带的两端均设置有相配合的魔术贴组。
14、采用该技术方案后,通过魔术贴组将第三固定带和第四固定带分别固定在患者的小腿和大腿上,从而将患者的下肢与小腿固定板和大腿固定板相连,适用于各种下肢粗细的患者使用。
15、作为优选,所述脚套包括用于套设在患者脚部的内套,所述内套的外表面连接有第一固定带和第二固定带,所述第一固定带和第二固定带的中部与内套固定连接,第一固定带和第二固定带的两端均设置有相配合的魔术贴组,所述第一固定带与训练板固定连接,所述第二固定带与所述底板固定连接。
16、采用该技术方案后,通过第一固定带和第二固定带配合将患者脚部固定。
17、一种智能调节的下肢关节训练装置的使用方法,包括以下步骤:
18、步骤1:将踝关节训练装置安装在患者脚踝处,同时将患者的下肢固定在小腿固定板和大腿固定板上;
19、步骤2:在控制终端输入患者相关信息,根据第一转动机构、第二转动机构和旋转机构上的角度检测机构以及所述踝关节训练装置上的训练强度检测机构获取适合该患者的各个训练动作的训练强度;
20、步骤3:控制终端根据步骤2得到的训练强度自动启动第一转动机构、第二转动机构、旋转机构和角度检测机构对患者进行训练。
21、采用该技术方案后,在训练前先进行强度制定,对每个患者制定最适合的训练方式,解决了针对不同患者训练方式千篇一律的问题,提高了训练效果。
22、作为优选,步骤2中包括以下训练动作的训练强度:
23、a:屈膝训练:启动第一转动机构和第二转动机构,带动患者下肢做屈膝运动,根据患者的反馈停止第一转动机构和第二转动机构,根据第一转动机构和第二转动机构上的角度检测机构获取该患者的所适合的屈膝训练转动角度;
24、b:抬腿训练:启动第一转动机构和第二转动机构,带动患者下肢做抬腿,根据患者的反馈停止第一转动机构和第二转动机构,根据第一转动机构和第二转动机构上的角度检测机构获取该患者的所适合的抬腿训练转动角度;
25、c:髋关节外展训练:启动旋转机构带动患者下肢外展,通过旋转机构上的角度检测机构获取该患者的所适合的髋关节外展训练转动角度;
26、d:踝关节训练:启动踝关节训练装置带动患者踝关节训练,根据训练强度检测机构获取该患者所适合的踝关节训练强度。
27、综上所述,由于采用了上述技术方案,本发明的有益效果是:
28、1.适用于不同关节活动度的患者使用,膝关节、髋关节和踝关节的训练可单独进行,适合各种病情的患者使用,通过装置替代现有技术中康复师人工进行抬腿弯腿等训练,训练方式较为全面,降低了康复师的工作强度。
29、2.在训练前先进行强度制定,对每个患者制定最适合的训练方式,解决了针对不同患者训练方式千篇一律的问题,提高了训练效果。
30、3.患者将脚伸入脚套内固定,通过训练板和底板的转动可以带动患者脚部向前倾斜或向后倾斜,通过第三转动板的转动,可以带动踝关节左右转动,运动方式较为完善。
- 还没有人留言评论。精彩留言会获得点赞!