进针机械手控制系统及微创手术机器人
本发明涉及医疗器械控制领域,尤其涉及一种进针机械手控制系统及微创手术机器人。
背景技术:
1、随着信息技术在医疗器械领域的发展,手术机器人在医疗领域的应用越来越广泛,目前,已有的控制系统已经可以控制手术机器人实现多自由度运动,但是,对于适用于微创手术的进针机械手而言,在一定的场景下,需要控制穿刺针实现弯曲、旋转等多自由度的复杂运动。现有的手术机器人控制系统,在需要控制穿刺针实现弯曲、旋转等复杂运动时,仍然需要医护人员手动操作,不仅会增加医护人员的工作强度,还容易导致较大的操作误差,不利于医疗救治工作的开展。
技术实现思路
1、本发明提供一种进针机械手控制系统及微创手术机器人,用以解决现有技术中手工控制穿刺针实现弯曲、旋转等多自由度复杂运动时,容易增加医护人员工作量,且容易导致较大的操作误差的缺陷,实现对进针机械手多自由度复杂运动的高精度控制。
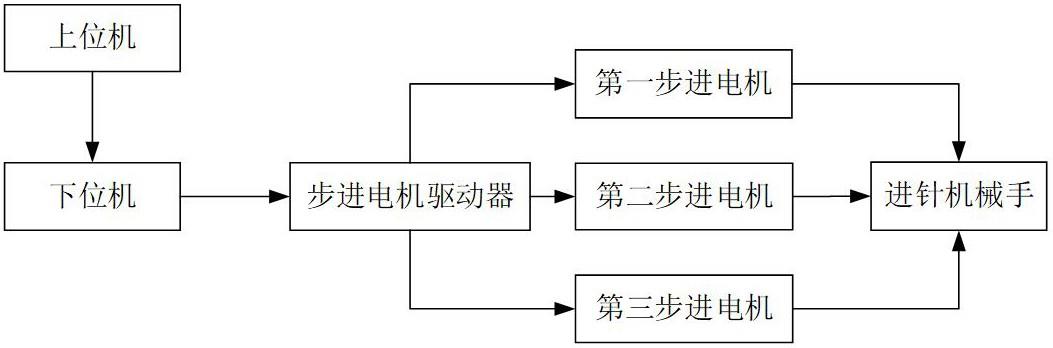
2、本发明提供一种进针机械手控制系统,包括:
3、进针机械手,末端设置有柔性穿刺针;
4、设置在所述进针机械手上的多个步进电机,所述多个步进电机包括第一步进电机、第二步进电机和第三步进电机;
5、上位机,用于获取所述柔性穿刺针的运动参数,并根据所述运动参数生成第一控制指令;
6、下位机,与所述上位机通信连接,用于根据所述第一控制指令生成第二控制指令;
7、步进电机驱动器,与所述下位机电连接,用于将所述第二控制指令转化为驱动信号;
8、所述驱动信号用于驱动所述第一步进电机,以控制所述柔性穿刺针进行进退针运动;和/或,驱动所述第二步进电机,以控制所述柔性穿刺针进行弯曲运动;和/或,驱动所述第三步进电机,以控制所述柔性穿刺针进行旋转运动。
9、根据本发明提供的进针机械手控制系统,所述进针机械手还包括滑动模组,所述滑动模组包括滑块以及与所述滑块配合的导轨,所述导轨与所述柔性穿刺针平行;
10、所述柔性穿刺针、所述第一步进电机、所述第二步进电机和所述第三步进电机均设置在所述滑块上;
11、所述驱动信号用于驱动所述第一步进电机时,驱动所述滑块沿着所述导轨运动,以控制所述柔性穿刺针进行进退针运动。
12、根据本发明提供的进针机械手控制系统,所述滑块上还设有第一传动装置,所述第一传动装置与所述第二步进电机连接;
13、所述第一传动装置包括线轴和牵引线,所述牵引线一端缠绕在所述线轴上,另一端与所述柔性穿刺针的作业端连接;
14、所述驱动信号用于驱动所述第二步进电机时,驱动所述第一传动装置带动所述线轴旋转,实现对所述牵引线的收放,以控制所述柔性穿刺针的作业端进行弯曲运动。
15、根据本发明提供的进针机械手控制系统,所述第一传动装置还包括相互配合的蜗轮和蜗杆;
16、所述蜗杆与所述第二步进电机连接,所述线轴与所述蜗轮连接。
17、根据本发明提供的进针机械手控制系统,所述滑块上还设有第二传动装置;
18、所述第二传动装置与所述第三步进电机连接;
19、所述驱动信号用于驱动所述第三步进电机时,驱动所述第二传动装置旋转,以控制所述柔性穿刺针进行旋转运动。
20、根据本发明提供的进针机械手控制系统,所述滑块上还设有箱体,所述第二传动装置、所述第二步进电机和所述第三步进电机设置在所述箱体内;
21、所述第二传动装置包括相互配合的第一齿轮和第二齿轮;
22、所述第一齿轮与所述第三步进电机连接;
23、在所述第二齿轮的轴线与所述柔性穿刺针平行的方向上,所述第二齿轮一侧与所述箱体的第一面板的内侧抵接,另一侧与所述柔性穿刺针的非作业端连接;
24、所述箱体的第二面板上设有第一导向筒,用于固定所述柔性穿刺针;
25、所述第一面板和所述第二面板是所述箱体中与所述柔性穿刺针垂直的两相对面。
26、根据本发明提供的进针机械手控制系统,所述导轨末端设有与所述导轨垂直的限位挡板,用于限制所述滑块在所述导轨上的位移极限;
27、所述限位挡板上设有所述柔性穿刺针的第二导向筒;
28、所述第二导向筒上设有定位装置,用于对所述柔性穿刺针的作业端进行跟踪定位,并采集所述柔性穿刺针的位置信息。
29、根据本发明提供的进针机械手控制系统,所述上位机设有交互界面,所述交互界面中包括数据发送区和数据接收区,所述数据发送区用于供用户配置所述柔性穿刺针的运动参数;
30、所述下位机还用于向所述上位机发送所述柔性穿刺针的位置信息;
31、所述上位机还用于根据所述位置信息获取所述柔性穿刺针的实时运动参数,并将所述位置信息和所述实时运动参数显示在所述数据接收区。
32、根据本发明提供的进针机械手控制系统,所述进针机械手控制系统还包括供电装置、控制杆和数模转化模块,所述供电装置与所述步进电机驱动器电连接;所述控制杆与所述下位机电连接,用于供用户进行手动控制;
33、所述下位机还用于采集所述控制杆根据用户的手动控制操作生成的模拟信号;
34、所述数模转化模块与所述下位机电连接,用于将所述模拟信号转化为数字信号;
35、所述下位机还用于根据所述数字信号生成所述第二控制指令。
36、本发明还提供一种微创手术机器人,包括上述任一种所述的进针机械手控制系统。
37、本发明提供的进针机械手控制系统及微创手术机器人,通过上位机获取柔性穿刺针的运动参数,通过下位机向步进电机驱动器发送控制指令,步进电机驱动器将下位机的控制指令转化为驱动信号,驱动多个步进电机以控制进针机械手末端的柔性穿刺针进行进退针、弯曲及旋转等多自由的复杂运动,无需医护人员进行手动操作,提高了手术操作精度,降低了医护人员的工作强度,同时,降低了医护人员手动操作时因疲劳、手抖动、手眼协调等问题带来较大操作误差的风险。
技术特征:
1.一种进针机械手控制系统,其特征在于,包括:
2.根据权利要求1所述的进针机械手控制系统,其特征在于,所述进针机械手还包括滑动模组,所述滑动模组包括滑块以及与所述滑块配合的导轨,所述导轨与所述柔性穿刺针平行;
3.根据权利要求2所述的进针机械手控制系统,其特征在于,所述滑块上还设有第一传动装置,所述第一传动装置与所述第二步进电机连接;
4.根据权利要求3所述的进针机械手控制系统,其特征在于,所述第一传动装置还包括相互配合的蜗轮和蜗杆;
5.根据权利要求2所述的进针机械手控制系统,其特征在于,所述滑块上还设有第二传动装置;
6.根据权利要求5所述的进针机械手控制系统,其特征在于,所述滑块上还设有箱体,所述第二传动装置、所述第二步进电机和所述第三步进电机设置在所述箱体内;
7.根据权利要求2所述的进针机械手控制系统,其特征在于,所述导轨末端设有与所述导轨垂直的限位挡板,用于限制所述滑块在所述导轨上的位移极限;
8.根据权利要求7所述的进针机械手控制系统,其特征在于,所述上位机设有交互界面,所述交互界面中包括数据发送区和数据接收区,所述数据发送区用于供用户配置所述柔性穿刺针的运动参数;
9.根据权利要求1所述的进针机械手控制系统,其特征在于,所述进针机械手控制系统还包括供电装置、控制杆和数模转化模块,所述供电装置与所述步进电机驱动器电连接;所述控制杆与所述下位机电连接,用于供用户进行手动控制;
10.一种微创手术机器人,其特征在于,包括如权利要求1至9任一项所述的进针机械手控制系统。
技术总结
本发明涉及医疗器械控制领域,提供一种进针机械手控制系统及微创手术机器人,该系统包括:进针机械手,末端设置有柔性穿刺针;设置在进针机械手上的多个进电机;上位机,用于获取柔性穿刺针的运动参数,并根据运动参数生成第一控制指令;下位机,与上位机通信连接,用于根据第一控制指令生成第二控制指令;步进电机驱动器,与下位机电连接,用于将第二控制指令转化为驱动信号;驱动信号用于驱动步进电机,以控制柔性穿刺针进行进退针运动,和/或弯曲运动,和/或旋转运动。本发明提供的控制系统可以控制穿刺针实现弯曲、旋转等多自由度的复杂运动,避免了手动操作产生的较大操作误差,降低了医护人员的工作量,提高了控制精度和手术精度。
技术研发人员:王冠斌,孙椰望,李伟钊,孙阿祥,杨鲁伟
受保护的技术使用者:中国科学院理化技术研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!