一种基于亥姆霍兹线圈的磁性导丝操纵系统及操纵方法
本发明涉及医疗器械,尤其涉及一种基于亥姆霍兹线圈的磁性导丝操纵系统及操纵方法。
背景技术:
1、在磁导航手术机器人辅助微创手术中,磁性导丝操纵系统可采用特制的远端带有永磁性磁体或铁磁性物体的导引导丝,利用外在的大型磁体在病人的躯干部位产生梯度变化的磁场空间,通过控制外在磁体的角度和距离来改变对导丝远端磁体产生的力,从而改变导丝远端的朝向,达到远端导向目的。磁性导引导丝进入人体后,需要经过一系列血管分叉才能到达病变部位,在这一过程中,头端转向主要通过外部磁场诱导实现,对磁性导丝操纵系统的性能提出了较高的要求。其中,磁性导丝操纵系统的实时性与可操作性是非常必要的,它不仅可以减少磁导丝在血管内导航的操作延迟,对提高磁导丝递送效率也有极大的帮助,若磁性导丝操纵系统的可操作性过低,不仅在磁导丝递送过程中会使患者遭受痛苦,而且会导致磁导丝无法到达远端的冠脉狭窄,从而导致手术失败。
2、现有技术中磁性导丝操纵系统通常采用机械臂固定永磁体、机械臂集成线圈、梯度线圈等方式,通过使用不同类型的磁场发生器,实现“磁性导丝操纵”功能。在具体实施中,首先需要定制特定尺寸的高性能钕铁硼永磁体、与永磁体尺寸匹配的模型、七自由度协作机械臂。然后,将永磁体装入尺寸匹配的模型中,并将模型与七自由度协作机械臂的末端相连。最后,使用通讯电缆将机械臂与控制台相连,组成基于机械臂固定永磁体的磁性导丝操纵系统。
3、当采用机械臂集成线圈的方式构建磁性导丝操纵系统时,首先需要准备并联机械臂与机械臂的主控台。随后,将定制线圈缠绕在并联机械臂表面,使线圈可以随机械臂移动而移动。最后,将线圈电流控制器集成在机械臂的主控台中,实现对线圈电流的控制,从而控制磁场强度,得到基于机械臂集成线圈的磁性导丝操纵系统。
4、当采用梯度线圈作为磁场发生器时,首先将定制的梯度线圈固定在机械装置上,然后采用主控台控制梯度线圈的电流,从而控制磁场强度与方向,实现对磁性导丝的远程操纵。
5、现有文献(jeon s,hoshiar a k,kim k,et al.a magnetically controlledsoft microrobot steering a guidewire in a three-dimensional phantom vascularnetwork[j].soft robotics,2019,6(1):54-68.)中公开采用梯度线圈作为磁场发生器,并将定制的梯度线圈固定在机械装置上,然后采用主控台控制梯度线圈的电流,从而控制磁场强度与方向,实现对磁性导丝的远程操纵。这种方法的缺点是采用梯度线圈作为磁场发生器时,其产生的磁场会由于梯度不均匀导致磁性导丝进行轻微的轴向运动,降低血管内磁性导丝递送精度,而在具有狭窄病变的脆弱血管中,递送精度是手术成功的基础。
6、采用机械臂固定永磁体的形式搭建磁性导丝操纵系统时,由于机械臂成本较高且操纵复杂,会使得系统制作成本居高不下,并严重影响临床推广与医生使用。此外,有研究表明,当采用机械臂集成线圈的方式时,产生的磁场动力学不稳定,不均匀的磁场梯度会生成牵引磁性导丝头端前进或后撤的拉力,而这种拉力引起的平移是难以控制的,在高精度血管内导航时存在手术风险。同样的,当采用梯度线圈作为磁场发生器时,其产生的磁场会由于梯度不均匀导致磁性导丝进行轻微的轴向运动,降低血管内磁性导丝递送精度。
7、综上,现有技术的缺陷在于:
8、1.磁性导丝操纵系统的制作与使用成本较高的问题。
9、2.梯度磁场导致的牵引力问题。
10、3.永磁体导致的磁场可编程性差问题。
技术实现思路
1、为了克服以上技术问题,本发明目的是提供一种基于亥姆霍兹线圈的磁性导丝操纵系统和操纵方法,通过亥姆霍兹线圈产生的匀强磁场,从而控制磁性导丝在目标环境内进行精准移动,提高控制系统的可编程性,降低整体系统成本。
2、本发明提供了如下的技术方案:
3、第一方面
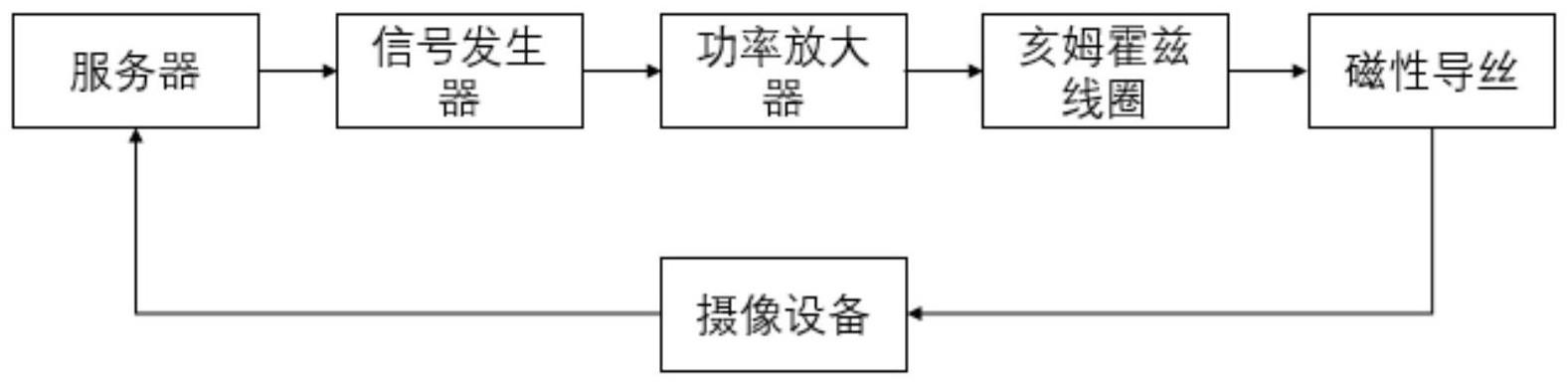
4、本发明提供了一种基于亥姆霍兹线圈的磁性导丝操纵系统,其包括依次电连接的服务器、信号发生器、功率放大器、所述亥姆霍兹线圈、所述磁性导丝和摄像设备;
5、所述服务器,用于设置从外部获得所述亥姆霍兹线圈的工作电流大小、方向和所述亥姆霍兹线圈的波形参数,并输出用于控制所述亥姆霍兹线圈引导所述磁性导丝的在目标环境内移动的电流信号;
6、所述信号发生器,用于将所述服务器的控制信号进行中转;
7、所述功率放大器,用于将来自所述信号放大器的控制信号放大处理;
8、所述亥姆霍兹线圈包括三对相互正交的线圈即x线圈、y线圈和z线圈,接收来自所述功率放大器的电流信号,并对应分别产生x平面、y平面与z平面的匀强磁场,诱导所述磁性导丝偏转;
9、所述摄像设备,用于采集所述磁性导丝的影像,并将所得影像传输回所述服务器中。
10、根据一些实施方式,所述磁性导丝选自钕铁硼磁粉与聚二甲基硅氧烷组成的组合物。
11、第二方面
12、本发明还提供了上述基于亥姆霍兹线圈的磁性导丝操纵系统的操纵方法,其包括以下步骤:
13、s11:准备工作,将所述基于亥姆霍兹线圈的磁性导丝操纵系统的部件连接并调试完毕;准备所述磁性导丝;
14、s12:设置亥姆霍兹线圈中x、y、z线圈中各线圈的工作电流大小,所述磁性导丝的偏转参数和波形电流;所述磁性导丝的偏转参数包括偏转角速度和偏转角度;
15、s13:控制磁性导丝进行偏转,将所述磁性导丝固定于目标环境的初始位置,控制磁性导丝操纵系统在x平面、y平面或z平面产生特定大小与方向的匀强磁场,使磁性导丝分别在x平面、y平面或z平面内逆时针偏转与顺时针偏转至目标环境的目标位置。
16、根据一些实施方式,s12具体包括以下步骤:
17、s121:首先分别设计x、y、z线圈的工作电流函数,通过所述工作电流函数,生成对应的电流波形,并将该电流波形分别对应作为x、y、z线圈的工作电流,经过所述信号发生器与所述功率放大器,分别输入到所述亥姆霍兹线圈的x、y、z线圈中,进而分别产生x、y、z平面匀强磁场;
18、s122:控制所述磁性导丝的偏转角速度,所述磁性导丝的偏转角速度等于所述工作电流函数的导数;
19、s123:控制所述磁性导丝的偏转角度大小,通过调整所述功率放大器的放大倍数来调整所述磁性导丝的偏转角度大小。
20、根据一些实施方式,所述x、y、z线圈的工作电流函数为q(p),其中p为时间,区间为[0,t],其中t为能够整除9400的正整数;q值为电流的幅值,q值的阶段数量为2~10中的任意自然数。
21、根据一些实施方式,s121步骤中的所述x、y、z线圈的工作电流函数分别如下式:
22、
23、其中p为时间,区间为[0,100],q值为电流的幅值,区间为[0,10]。
24、根据一些实施方式,s122步骤中的所述磁性导丝的偏转角速度如下式:
25、
26、在上述实施方式中,当p∈[0,10]时,q(p)的导数为0,此时磁性导丝偏转角速度为0,磁性导丝静止,亥姆霍兹线圈准备开始工作;
27、当p∈[10,20]时,q(p)的导数为1,此时磁性导丝以10°/s的角速度进行x平面偏转;
28、当p∈[20,100]时,q(p)的导数为0,此时磁性导丝偏转角速度为0,磁性导丝偏转结束,偏转角度不再变化,形态保持不变。
29、根据另一些实施方式,s121步骤中的所述x、y、z线圈的工作电流函数q(p)分别如下式:
30、
31、其中p为时间,区间为[0,100],q值为电流的幅值,区间为[0,1]。
32、根据一些实施方式,s122步骤中的所述磁性导丝的偏转角速度如下式:
33、
34、相比于现有技术,本发明具备以下有益效果:
35、(1)磁性导丝操纵系统的制作与使用成本问题。本发明操纵系统利用亥姆霍兹线圈引导磁性导丝,系统结构简洁,在保持磁场实时性、可操作性以及可编程性的同时,降低了磁性导丝操纵系统的制作与使用成本。
36、(2)梯度磁场导致的牵引力问题。本发明专利所提出的磁导丝操纵系统基于亥姆霍兹线圈,产生的磁场为匀强磁场,理论上不存在磁场梯度,对磁性导丝头端不产生牵引力,有效避免了操作过程中牵引力不受控的问题。
37、(3)永磁体导致的磁场可编程性差问题。本发明专利所提出的磁导丝操纵系统采用亥姆霍兹线圈作为磁场发生器,使用过程可通过控制电流大小与方向对磁场进行编程控制,实现磁性导丝头端的精确偏转。
- 还没有人留言评论。精彩留言会获得点赞!