一种高精度治疗头自动对中方法与流程
本发明属于放疗设备治疗头对中,具体涉及一种高精度治疗头自动对中方法。
背景技术:
1、放射治疗是指通过放射线的局部治疗,消灭和根治局部肿瘤的原发灶和转移灶,放射治疗与手术、化疗一起构成肿瘤的三大基本治疗手段,但放射治疗有适用范围广、疗效确切、过程简单、副作用小、对患者自身条件要求不高等优点,约2/3的患者在治疗癌症的过程中需要用放射治疗,成为治疗的主要手段之一。
2、术中放疗是手术中对可见肿瘤、瘤床区或易复发转移部位,在直视下的一次大剂量放疗。目前术中放疗在临床实际操作中,现有的放疗设备移入、移出手术室、针对患者的病发部位调整等操作,特别是调整范围受限、手动调整等因素,无法一次性调整到位,有的需要多次调整,需要较长时间,延长手术整个时间,也增加患者感染的几率。因此,当前缺少一种高精度治疗头自动对中方法,让全自动治疗头与限光筒进行高精度对准成为可能。
技术实现思路
1、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种高精度治疗头自动对中方法,摄像头cam1获取第三标识环的纹理,确定标识盘位置,处理器进行治疗头初步定位运动轨迹的规划,处理器控制机械臂运动,实现治疗头的初步对中;摄像头cam2和摄像头cam3获取标识盘上第一标识环和第三标识环的纹理,确定治疗头和标识盘的相对位置,处理器进行治疗头精准定位运动轨迹的规划,控制机械臂运动,使治疗头与限光筒进行精准对中,实现治疗头与限光筒全自动高精度对准,便于推广使用。
2、为解决上述技术问题,本发明采用的技术方案是:一种高精度治疗头自动对中方法,所述治疗头设置在放疗设备上,所述放疗设备包括
3、底座:用于整个设备的移动和治疗时的支撑、固定;
4、固定机架:设置在底座上并固定机械臂;
5、机械臂:用于固定治疗头并驱动治疗头的运动;
6、治疗头:用于放射治疗射线;
7、限束装置:包括限光筒和安装在限光筒顶部的标志盘,对齐患者的病灶区,用于射线的准直,计量分布控制与防护;
8、图像引导对准装置:包括处理器、两组标识件和两组摄像头,一组标识件包括设置在标志盘上表面的第一标识环、设置在标志盘上表面边缘的第二标识环和设置在标志盘外侧表面的第三标识环,一组摄像头包括设置在固定机架上的第一组摄像头;另一组标识件包括设置在治疗头外壳朝向固定机架一侧的治疗头标记物,另一组摄像头包括设置在束流筒出射端面上的第二组摄像头,第一组摄像头包括摄像头cam1,所述第二组摄像头包括摄像头cam2和摄像头cam3;
9、治疗头标记物的数量为三个,三个治疗头标记物不在一条直线上且均为球形标识物,三个治疗头标记物的纹理和颜色均不相同;
10、摄像头cam2的相机光轴与治疗头的轴心平行,摄像头cam3的相机光轴与治疗头的轴心成15°~20°;
11、其特征在于,该方法包括以下步骤:
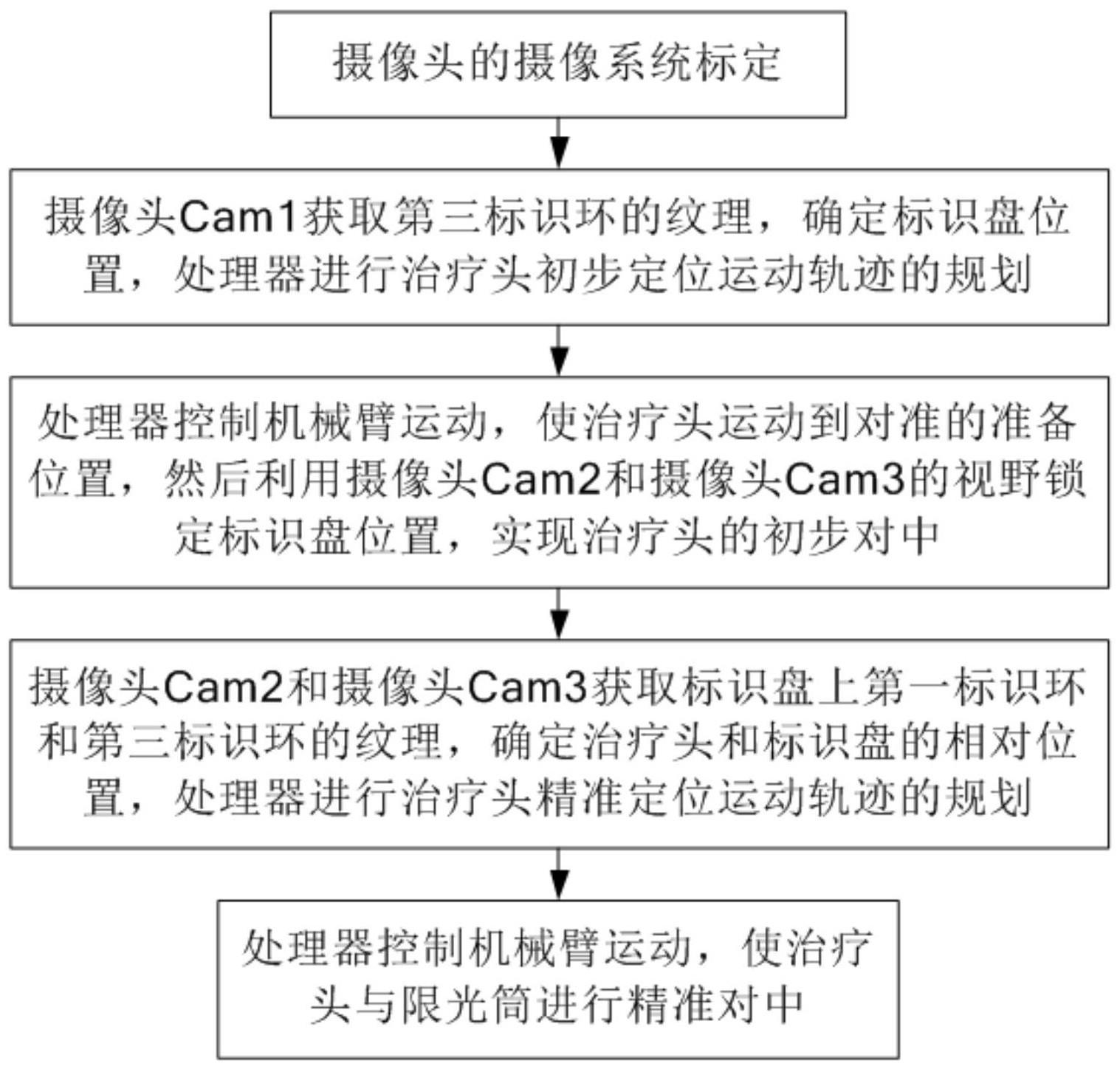
12、步骤一、摄像头cam1、摄像头cam2和摄像头cam3的摄像系统标定;
13、步骤二、摄像头cam1获取第三标识环的纹理,确定标识盘位置,处理器进行治疗头初步定位运动轨迹的规划;
14、步骤三、处理器控制机械臂运动,使治疗头运动到对准的准备位置,然后利用摄像头cam2和摄像头cam3的视野锁定标识盘位置,实现治疗头的初步对中;
15、步骤四、摄像头cam2和摄像头cam3获取标识盘上第一标识环和第三标识环的纹理,确定治疗头和标识盘的相对位置,处理器进行治疗头精准定位运动轨迹的规划;
16、步骤五、处理器控制机械臂运动,使治疗头与限光筒进行精准对中。
17、上述的一种高精度治疗头自动对中方法,其特征在于:步骤二中,摄像头cam1获取第三标识环的纹理,确定标识盘位置的过程如下:
18、步骤201、摄像头cam1持续固定帧率采集第三标识环的图像;
19、步骤202、在摄像头cam1的视野范围内,处理器识别第三标识环的弧状线段纹理;
20、步骤203、处理器根据步骤202中的弧状线段拟合椭圆;
21、步骤204、确定椭圆的长短轴;
22、步骤205、根据长轴的长度,确定标识盘到摄像头cam1的距离;
23、步骤206、步骤203中长短轴交汇的位置,即为标识盘中心位置,通过步骤204的结果,等比例确定标识盘中心位置相对摄像头cam1的坐标;
24、步骤207、通过短轴的指向和长短轴的比值,以及弧状线段内部的纹理颜色,确定标识盘的位姿。
25、上述的一种高精度治疗头自动对中方法,其特征在于:步骤四中,摄像头cam2和摄像头cam3获取标识盘上第一标识环和第三标识环的纹理,确定治疗头和标识盘的相对位置的过程如下:
26、步骤401、摄像头cam2和摄像头cam3持续固定帧率采集第一标识环和第三标识环的图像;
27、步骤402、处理器循环处理摄像头cam2和摄像头cam3的数据,直到治疗头的位姿离目标值的偏差小于容差值为止。
28、上述的一种高精度治疗头自动对中方法,其特征在于:步骤402的过程如下:
29、步骤4021、根据摄像头cam3数据,计算标识盘相对摄像头cam3的角度,根据角度偏差调整治疗头姿态,使治疗头束流轴向与标识盘的上平面的法向量平行;
30、步骤4022、根据摄像头cam2数据,计算标识盘中心相对治疗头下端的距离,根据距离的偏差调整治疗头位置;
31、步骤4023、根据摄像头cam2数据,计算标识盘中心相对治疗头束流轴心的坐标,根据坐标偏差调整治疗头位置,使治疗头束流轴与标识盘的中轴重叠。
32、上述的一种高精度治疗头自动对中方法,其特征在于:步骤4021的过程如下:
33、首先,处理器识别图像中标识盘上平面的环状结构纹理,该环状结构纹理在图像中成一个椭圆环;
34、然后,计算椭圆环外椭圆的长轴短轴比,短轴指向,计算第一标识环与第三标识环的比值,与标定的数据进行对比,计算出标识盘相对摄像头cam3的角度偏差。
35、上述的一种高精度治疗头自动对中方法,其特征在于:步骤4022的过程如下:
36、首先,处理器识别图像中标识盘上平面的环状结构纹理,该环状结构纹理在图像中成一个椭圆环;
37、然后,计算椭圆环外椭圆的长轴,与标定的数据进行对比,计算出标识盘相对摄像头cam2的距离偏差。
38、上述的一种高精度治疗头自动对中方法,其特征在于:步骤4023的过程如下:
39、首先,处理器识别图像中标识盘上平面的环状结构纹理,该环状结构纹理在图像中成一个椭圆环;
40、然后,计算椭圆环外椭圆的长轴短轴的焦点,与标定的数据进行对比,计算标识盘中心相对治疗头束流轴心的坐标的偏差。
41、本发明的有益效果是,摄像头cam1获取第三标识环的纹理,确定标识盘位置,处理器进行治疗头初步定位运动轨迹的规划,处理器控制机械臂运动,实现治疗头的初步对中;摄像头cam2和摄像头cam3获取标识盘上第一标识环和第三标识环的纹理,确定治疗头和标识盘的相对位置,处理器进行治疗头精准定位运动轨迹的规划,控制机械臂运动,使治疗头与限光筒进行精准对中,实现治疗头与限光筒全自动高精度对准,便于推广使用。
42、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!