一种面向膝关节康复训练的辅助系统及方法
本发明属于康复训练,具体涉及一种面向膝关节康复训练的辅助系统及方法。
背景技术:
1、未来在养老助老、失能辅助、康复和运动康复等领域的需求日益剧增。以生-机-电一体化为重要特征的智能康复辅助系统,融合生物医学、信息科学、机械、电子科学、自动控制等领域知识,解决人体运动意图识别及智能交互控制方法等科技难题,可有效促进康复医学和机械电子领域的技术进步和观念变革,为老年疾病的预防和治疗提供理论和技术支撑,助推健康老龄化和健康增龄。
2、膝关节是人体非常重要的部位,在走路等日常运动过程中需要承担人体绝大部分重量,在人的日常生活中扮演十分重要角色,且在运动过程中经常受到损伤。此外,在完成全膝关节置换术后患者的膝关节功能恢复也需要针对膝关节完成特定的康复训练。因此,本专利针对膝关节康复训练,设计一款智能的可穿戴式康复训练辅助设备,实现膝关节的主动和被动康复训练。
3、现状:目前国内外已有部分帮助患者完成针对膝关节康复训练的辅助设备,如康复机器人、康复运动器、靠背式膝关节煅炼器、康复活动治疗仪、可穿戴式膝关节理疗器等。
4、常见的下肢康复机器人通过身体姿态信息采集模块和机械控制模块,可智能化地辅助患者完成同时针对膝关节、髋关节和踝关节等下肢主要关节完成专业的主被动康复训练,功能强大,且可真实模拟人日常走路的过程。然而此类设备体积庞大,价格昂贵,训练过程需要依靠专业的理疗师辅助完成,通常面向医院和康复理疗中心,限制了其面向广大消费者使用的能力。
5、为降低设备的成本和使用复杂度,市面上又出现单独针对膝关节康复训练的辅助设备,如康复运动器、靠背式膝关节煅炼器、康复活动治疗仪等。此类设备只针对单一关节的运动,因而机械结构通常相对简单,成本也相对较低。然而,此类康复设备在使用过程中需要使用基座或装置固定,不便于移动,通常也只适用于医院或者理疗中心。此外,此类型装置目前只能实现简单的主动康复训练模式,缺少智能化的交互控制。
6、最近又出现了可穿戴式的膝关节康复训练设备,此类设备包裹于人体大腿和小腿外侧,在关节处通过电机驱动,为膝关节的屈曲提供扭矩,不需要使用固定的底座或者装置使用方便,可应用的场景也更加多元化。然而,为驱动膝关节屈曲,此类设备在膝关节处需要提供非常大的扭矩,造成所需要的电机功率大从而体积也大,设备昂贵。此外,为了减速增矩,相关机械结构也复杂,在使用过程中存在诸多不便。
技术实现思路
1、本发明涉及一种面向膝关节康复训练的辅助系统及方法,目的在于为需要膝关节康复的患者提供一款相较于康复机器人价格便宜,使用方便,能为膝关节提供较大助力作用的,具备主被动康复训练模式。
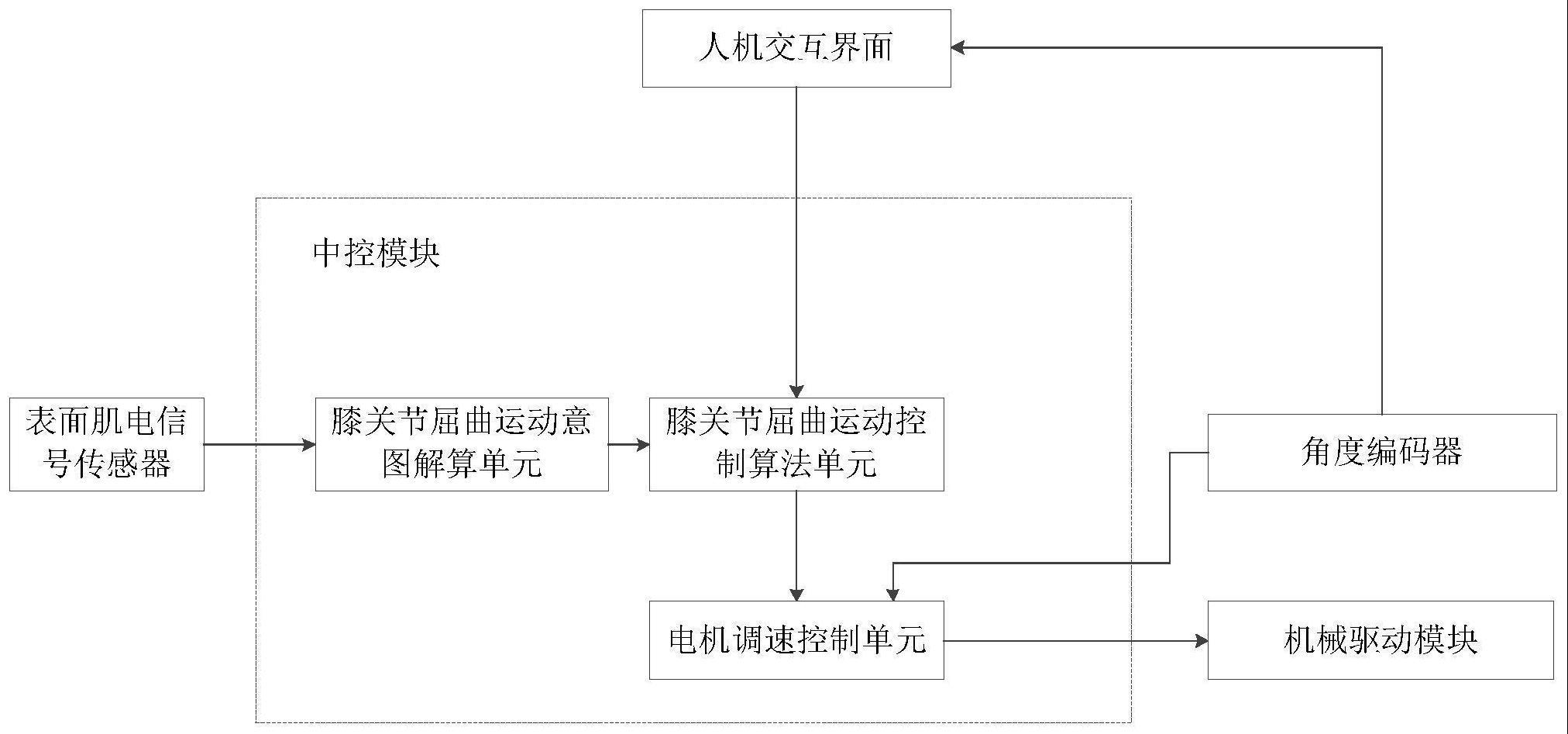
2、本发明的一方面提供一种面向膝关节康复训练的辅助系统,具体包括:表面肌电信号传感器、人机交互界面、角度编码器、中控模块、机械驱动模块;
3、所述中控模块分别与表面肌电信号传感器、人机交互界面和机械驱动模块连接;所述角度编码器与人机交互界面连接;
4、所述表面肌电信号传感器用于实时获取用户腿部的表面肌电信号;
5、所述角度编码器用于实时获取用户的实际关节弯曲角度;
6、所述人机交互界面用于获取用户输入的训练模式信息、训练时间和理想关节弯曲角度,并对用户的实际关节弯曲角度显示;所述训练模式信息包括:主动训练模式或被动训练模式;
7、所述中控模块用于根据用户输入的训练模式信息、训练时间、用户的实际关节弯曲角度、用户腿部的表面肌电信号和用户输入的理想关节弯曲角度计算得到电机调速信号;
8、所述机械驱动模块用于根据电机调速信号辅助用户进行康复训练。
9、进一步地,所述中控模块包括:膝关节屈曲运动意图解算单元、膝关节屈曲运动控制算法单元和电机调速控制单元;
10、所述膝关节屈曲运动意图解算单元用于根据表面肌电信号解算用户的膝关节屈曲运动意图;
11、所述膝关节屈曲运动控制算法单元用于根据用户输入的训练模式信息和用户的膝关节屈曲运动意图在训练时间内控制用户真实的膝关节屈曲运动意图;
12、所述电机调速控制单元用于根据用户真实的膝关节屈曲运动意图、用户的实际关节弯曲角度和用户输入的理想关节弯曲角度计算电机调速信号。
13、进一步地,所述根据表面肌电信号解算用户的膝关节屈曲运动意图包括:
14、k=envelope(semg)
15、其中,semg表示表面肌电信号,k表示膝关节屈曲运动意图,envelope表示信号包络函数。
16、进一步地,所述控制用户真实的膝关节屈曲运动意图包括:
17、
18、其中,ktrue表示用户真实的膝关节屈曲运动意图。
19、进一步地,所述电机调速信号包括:
20、
21、其中,f表示电机调速信号,值越大控制电机输出的转速越高,正负号代表电机转速的方向;θ1表示用户的实际关节弯曲角度;θ0表示用户输入的理想关节弯曲角度;v0表示电机额定转速,w表示机械结构减速增矩参数,根据实际选用的减速机械结构形式,其值范围一般为1到50。
22、进一步地,所述机械驱动模块包括:大腿支撑机构和小腿支撑机构;所述大腿支撑机构和小腿支撑机构通过角度编码器铰接,所述大腿支撑机构包括:螺纹杆、大腿放置垫和设置在大腿放置垫两侧的无刷电机,所述大腿放置垫一端设置有大腿可伸缩铰链支架;所述小腿支撑机构包括:小腿支撑垫和设置在小腿支撑垫两侧的滚珠丝杠;小腿支撑垫的一端设置有小腿可伸缩铰链支架,螺纹杆的一端通过齿轮与无刷电机铰接,螺纹杆的另一端贯穿滚珠丝杠与滚珠丝杠螺纹配合,所述大腿可伸缩铰链支架和小腿可伸缩铰链支架分别与角度编码器两侧滑动连接,所述无刷电机与中控模块连接。
23、进一步地,所述大腿放置垫和小腿支撑垫设置有多个上下贯穿的通孔。
24、进一步地,所述大腿放置垫和小腿支撑垫的表面均为下凹的曲面。
25、进一步地,所述大腿放置垫和小腿支撑垫的表面设置有海绵和海绵外的化纤面料。
26、进一步地,所述大腿放置垫和小腿支撑垫分别设有多个绑带。
27、本发明的另一方面提供一种面向膝关节康复训练的辅助方法,所述方法应用于所述一种面向膝关节康复训练的辅助系统,包括:
28、s1:获取用户输入的训练模式信息、训练时间和理想关节弯曲角度;所述训练模式信息包括:主动训练模式或被动训练模式;
29、s2:利用表面肌电信号传感器实时采集用户腿部的表面肌电信号;
30、s3:利用角度编码器实时获取用户腿部的实际关节弯曲角度;
31、s4:根据表面肌电信号解算用户的膝关节屈曲运动意图;
32、k=envelope(semg)
33、其中,semg表示表面肌电信号,k表示膝关节屈曲运动意图,envelope表示信号包络函数。
34、s5:根据用户输入的训练模式信息和用户的膝关节屈曲运动意图在训练时间内控制用户真实的膝关节屈曲运动意图;
35、
36、其中,ktrue表示用户真实的膝关节屈曲运动意图。
37、s6:根据用户真实的膝关节屈曲运动意图、用户的实际关节弯曲角度和用户输入的理想关节弯曲角度计算电机调速信号;
38、s7:根据电机调速信号驱动机械驱动模块辅助用户进行膝关节康复训练。
39、本发明至少具有以下有益效果
40、设备结构形式被设计为可穿戴式,使本设备使用方便,且丰富其使用场景;通过生-机-电一体化技术实现主、被动康复训练模式中的患者与设备的智能化交互;通过机械结构的创新提升设备对患者膝关节的助力作用;针对膝关节康复,提供可供选择的主被动康复训练模式;且本设备使用无刷电机驱动膝关节转动,相较于康复机器人使用的步进电机价格便宜;本发明所使用的滚珠丝杠具有动力单向输送的特性,即动力只能由无刷电机传输至小腿支撑件,而不能由小腿支撑件反向传输至无刷电机,即可实现在无刷电机在不供电的情况下实现膝关节角度的机械自锁,节省电力消耗。
- 还没有人留言评论。精彩留言会获得点赞!