导管控制方向与影像动作方向的一致性校准方法及系统与流程
本发明涉及一般的控制或调节系统,特别是涉及一种导管控制方向与影像动作方向的一致性校准方法及系统。
背景技术:
1、支持可调弯导管的血管介入机器人在dsa(数字减影血管造影)实时透视影像的指导下进行血管介入手术,它支持使用摇杆控制使得导管末端弯曲,且在dsa影像中呈现出沿对应方向弯曲的效果。
2、由于术中造影的体位随着手术的进程存在多次切换,如果不及时进行摇杆控制方向与dsa影像中呈现的运动方向的校准,会产生手眼不协调的问题,影响医生的控制判断,进而不方便于手术的进行。
3、也就是,存在摇杆控制导管的实际运动方向与影像中呈现的导管运动方向不一致的问题;即,当摇杆向前推进时,影像中的导管向其他方向移动,即便一开始在切换造影体位之前,摇杆推进方向和影像保持一致,但如果在切换造影体位后不进行校准,摇杆推进方向和影像中的导管推进方向仍存在偏差。
技术实现思路
1、为了解决上述问题,本发明提出了一种导管控制方向与影像动作方向的一致性校准方法及系统,当切换造影体位后,准确计算校准偏移角度,保证摇杆控制方向与影像平面中运动方向的一致。
2、为了实现上述目的,本发明采用如下技术方案:
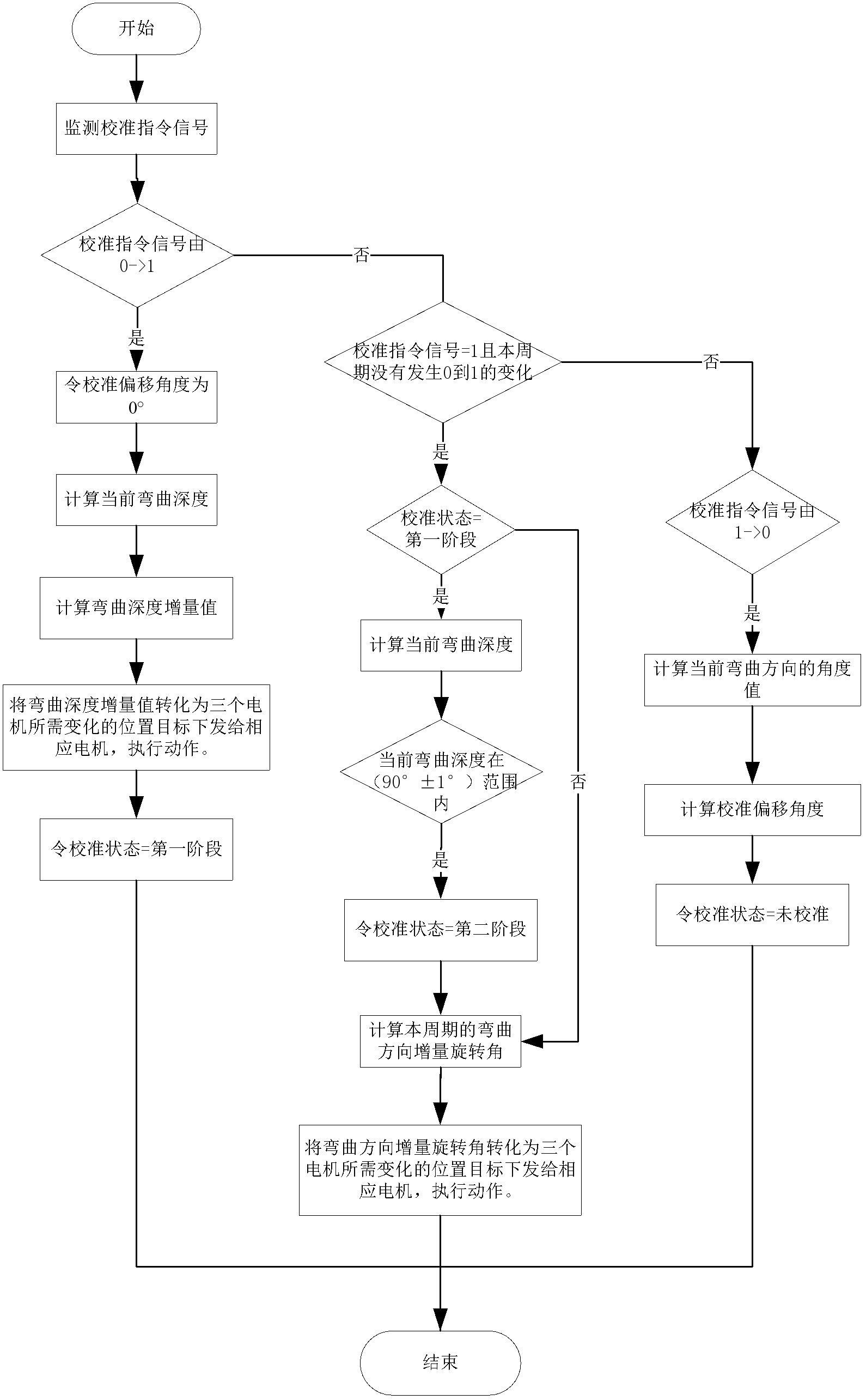
3、第一方面,本发明提供一种导管控制方向与影像动作方向的一致性校准方法,包括:
4、接收校准开始指令;
5、根据导管弯曲前后钢丝牵拉长度增量值,确定影像中导管的当前弯曲深度,根据当前弯曲深度和弯曲深度目标值确定弯曲深度增量值,以此控制导管弯曲至弯曲深度目标值;
6、设定每周期的弯曲方向增量旋转角,在弯曲深度目标值下,根据弯曲方向增量旋转角,进行弯曲方向的变化,直至接收到校准结束指令后,完成校准;
7、确定校准完成后弯曲方向的角度值,根据弯曲方向的角度值确定校准偏移角度,以在下一次控制导管弯曲方向时,将控制方向的角度值和校准偏移角度相加作为最终的控制方向。
8、作为可选择的实施方式,所述钢丝牵拉长度增量值为:根据控制导管弯曲的电机尾部编码器值与钢丝牵拉长度增量值的比例关系,得到钢丝牵拉长度增量值。
9、作为可选择的实施方式,所述钢丝牵拉长度增量值为:=k*(valuecoder-initvaluecoder);其中,k为电机尾部编码器值与钢丝牵拉长度增量值的换算比例;valuecoder为电机尾部当前编码器值;initvaluecoder为电机尾部初始编码器值。
10、作为可选择的实施方式,所述当前弯曲深度为:;其中,为当前弯曲深度;为当前的弯曲方向角度值;为第一钢丝牵拉长度增量值;为导管半径。
11、作为可选择的实施方式,通过弯曲方向增量旋转角,控制导管沿顺时针执行弯曲方向在0到360°间的变化,直至在影像中的导管在前进方向的右侧呈现最大弯曲,此时校准结束。
12、作为可选择的实施方式,所述弯曲方向的角度值为:;其中,为第一钢丝牵拉长度增量值,为第二钢丝牵拉长度增量值。
13、作为可选择的实施方式,所述校准偏移角度为在影像中观察到在右侧呈现最大弯曲时的弯曲方向的角度值除以360取余数。
14、第二方面,本发明提供一种导管控制方向与影像动作方向的一致性校准系统,包括:
15、指令接收模块,被配置为接收校准开始指令;
16、弯曲深度控制模块,被配置为根据导管弯曲前后钢丝牵拉长度增量值,确定影像中导管的当前弯曲深度,根据当前弯曲深度和弯曲深度目标值确定弯曲深度增量值,以此控制导管弯曲至弯曲深度目标值;
17、弯曲方向控制模块,被配置为设定每周期的弯曲方向增量旋转角,在弯曲深度目标值下,根据弯曲方向增量旋转角,进行弯曲方向的变化,直至接收到校准结束指令后,完成校准;
18、校准模块,被配置为确定校准完成后弯曲方向的角度值,根据弯曲方向的角度值确定校准偏移角度,以在下一次控制导管弯曲方向时,将控制方向的角度值和校准偏移角度相加作为最终的控制方向。
19、第三方面,本发明提供一种电子设备,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成第一方面所述的方法。
20、第四方面,本发明提供一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成第一方面所述的方法。
21、与现有技术相比,本发明的有益效果为:
22、本发明提出一种导管控制方向与影像动作方向的一致性校准方法及系统,增加平面校准功能,当切换造影体位后,执行校准流程,当在影像中观察到导管末端在前进方向的右侧呈现最大弯曲时,结束校准流程,记录校准偏移角度,参与到后续摇杆控制方向与影像平面中运动方向保证一致的运动控制过程中,准确计算校准偏移角度,实现在切换投影平面后,保证操作的手眼协调。
23、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.导管控制方向与影像动作方向的一致性校准方法,其特征在于,包括:
2.如权利要求1所述的导管控制方向与影像动作方向的一致性校准方法,其特征在于,所述钢丝牵拉长度增量值为:根据控制导管弯曲的电机尾部编码器值与钢丝牵拉长度增量值的比例关系,得到钢丝牵拉长度增量值。
3.如权利要求2所述的导管控制方向与影像动作方向的一致性校准方法,其特征在于,所述钢丝牵拉长度增量值为:=k*(valuecoder-initvaluecoder);其中,k为电机尾部编码器值与钢丝牵拉长度增量值的换算比例;valuecoder为电机尾部当前编码器值;initvaluecoder为电机尾部初始编码器值。
4.如权利要求2所述的导管控制方向与影像动作方向的一致性校准方法,其特征在于,所述当前弯曲深度为:;其中,为当前弯曲深度;为当前的弯曲方向角度值;为第一钢丝牵拉长度增量值;为导管半径。
5.如权利要求1所述的导管控制方向与影像动作方向的一致性校准方法,其特征在于,通过弯曲方向增量旋转角,控制导管沿顺时针执行弯曲方向在0到360°间的变化,直至在影像中的导管在前进方向的右侧呈现最大弯曲,此时校准结束。
6.如权利要求1所述的导管控制方向与影像动作方向的一致性校准方法,其特征在于,所述弯曲方向的角度值为:;其中,为第一钢丝牵拉长度增量值,为第二钢丝牵拉长度增量值。
7.如权利要求1所述的导管控制方向与影像动作方向的一致性校准方法,其特征在于,所述校准偏移角度为弯曲方向的角度值除以360后取余数。
8.导管控制方向与影像动作方向的一致性校准系统,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成权利要求1-7任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,用于存储计算机指令,所述计算机指令被处理器执行时,完成权利要求1-7任一项所述的方法。
技术总结
本发明公开一种导管控制方向与影像动作方向的一致性校准方法及系统,涉及一般的控制或调节系统技术领域,包括:接收校准开始指令;根据导管弯曲前后钢丝牵拉长度增量值,确定影像中导管的当前弯曲深度,根据当前弯曲深度和弯曲深度目标值确定弯曲深度增量值,以控制导管弯曲至弯曲深度目标值;设定每周期的弯曲方向增量旋转角,在弯曲深度目标值下,根据弯曲方向增量旋转角进行弯曲方向的变化,直至接收到校准结束指令;确定校准完成后弯曲方向的角度值,根据弯曲方向的角度值确定校准偏移角度,以在下一次控制导管弯曲方向时,将控制方向的角度值和校准偏移角度相加作为最终的控制方向。保证控制方向与影像中运动方向的一致。
技术研发人员:王迎智,张萍萍,田飞
受保护的技术使用者:极限人工智能有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!