一种C型臂CT系统几何参数的标定方法及装置
本发明涉及x射线ct(英文全称为“computed tomography”,中文全称为“电子计算机断层扫描”)成像,特别是关于一种c型臂ct系统中几何参数的标定方法及装置。
背景技术:
1、c型臂ct能够提供多种扫描模式,允许介入医师在手术室对患者执行术中三维成像,应用前景广泛。典型的c型臂ct设备,主要包括:c型机架、产生x射线的射线源、射线探测设备(如:采集图像的影像增强器、平板探测器等)、机械运动及控制装置、以及图像处理工作站。其中,射线源及探测器分别放置于c型机架两端。通常,机械运动装置可提供垂直升降、水平延伸、全角度旋转、轨道滑移等多种运动方式。而且,不同运动方式之间可以互相配合,实现多种扫描模式,满足不同患者的扫描成像需求,为术中成像及介入成像带来极大便利。但是,上述开放设计会引起机械的不稳定性,从而造成c型臂在扫描过程中存在晃动,进而引起重建图像中的几何伪影,导致获得的图像分辨率低。当几何伪影严重时,会影响医生的判读。
2、目前针对这类问题的几何参数标定问题主要包括:基于模体的解析标定方法、基于模体的迭代标定方法、基于图像的迭代标定方法以及借助相机或传感器等进行实时监测,来获取ct系统各部件的相对位置信息的标定方法。解析的求解算法通常会忽略部分参数或对模体设计要求较高;基于图像的迭代算法通常计算量大,且对图像特征有要求;而借助外部设备的标定方法则对相机摆放位置以及传感器的灵敏度要求较高。基于模体的优化求解算法因其可以求解所有的几何参数,且模体制作简单而应用广泛。虽然螺旋线模体具有良好的3维空间信息,可以用于逐个角度优化求解几何参数,但由于几何参数之间的高度相关性,初值的选择以及模体标记点的精度最终会影响参数的准确性。
技术实现思路
1、本发明的目的在于提供一种c型臂ct系统中几何参数的标定方法及装置来克服或至少减轻现有技术的上述缺陷中的至少一个。
2、为实现上述目的,本发明提供一种c型臂ct系统中几何参数的标定方法,其包括:
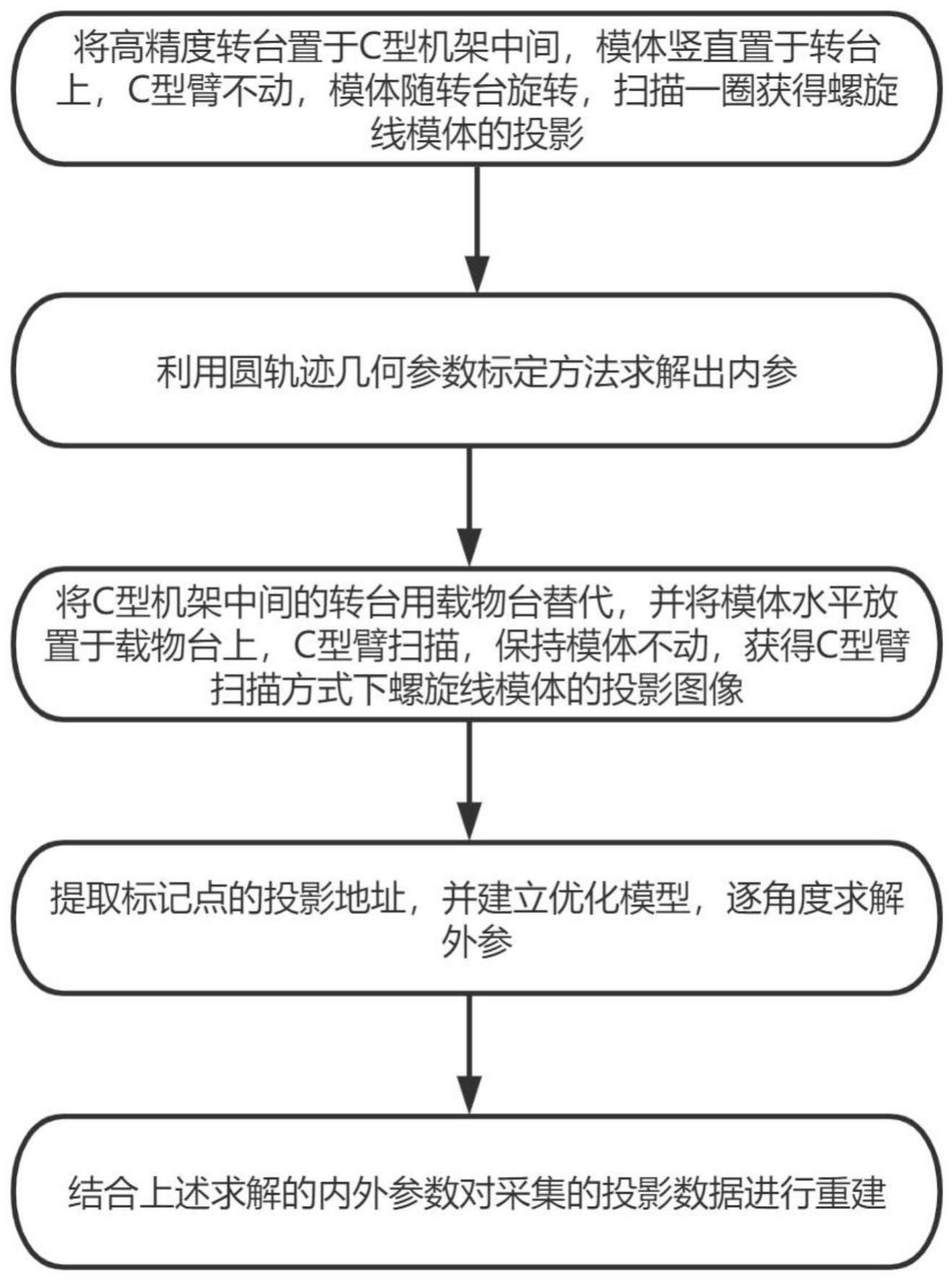
3、步骤1,将转台置于c型机架中间,并将螺旋线模体竖直放置于转台上,模体随转台旋转而c型臂保持不动,由此获取圆轨迹锥束扫描方式下模体的投影数据;将载物台置于c型机架中间,并将模体水平放置于载物台上,用c型臂扫描并保持模体不动,获得c型臂扫描方式下模体的投影数据;
4、步骤2,根据步骤1中圆轨迹锥束扫描的模体的投影数据,利用圆轨迹几何参数标定方法求解出不随角度变化的系统的内参;其中,内参包括射线源的焦点到探测器的垂直距离f、射线源的焦点在探测器上的垂足坐标(vs,ws);
5、步骤3,根据步骤1中c型臂扫描模体的投影数据、标记点的总数,确定模体上第i个标记点r在探测器上的投影地址
6、步骤4,建立模体坐标系下单个扫描角度下第i个标记点r的预测投影地址及提取第i个标记点r的投影地址的均方误差的优化模型;
7、步骤5,求解该优化模型,得到随角度变化的外参,并将所估计的内参和外参用于重建;其中,外参包括射线源的焦点坐标(sx,sy,sz),探测器的面内旋转角α、俯仰角β、倾斜角γ。
8、进一步地,模体包括圆管状的支撑体,在支撑体的内壁与外壁之间的壁体内设置有预设数量n和预设位置并被标记有顺序的标记点r,标记点r从支撑体的一端到另一端呈螺旋状排列,标记点r的中心依序连接可形成螺旋线,步骤1中的螺旋线的中心轴与转台的旋转轴方向基本一致,投影图像为x射线穿透模体在平板探测器上的投影图像。
9、进一步地,标记点r为预设直径的球状结构体。
10、进一步地,步骤2具体包括:
11、步骤21,通过最小化标记点r在多个角度下投影地址与提取的投影地址的均方误差,得到圆轨迹几何参数标定的优化模型建立如下式(1),将探测器水平方向的向量设置为v=(vx,vy,vy)t,探测器竖直方向的向量设置为w=(wx,wy,wz)t,vx、vy、vy、wx、wy、wz表示探测器水平、竖直方向向量在圆轨迹坐标系统中分别在x轴、y轴、z轴的分量:
12、
13、其中,ξk、ξ1分别为第k个、第1个扫描角度下圆轨迹锥束扫描系统的几何参数,sdd为射线源的焦点到转轴的垂直距离sod的延长线与探测器的交点os与射线源的焦点之间的距离,a、b、γ分别为探测器绕三个坐标轴的旋转角,(vo,wo)为交点os在探测器上的坐标,m为扫描角度的总数,n表示标记点r的总数,e(ξ1)为目标函数,θk表示第k个扫描角度的角度值,分别为第k个扫描角度、第i个标记点r在平行于探测器行的水平、竖直方向上的投影地址,分别为预测到的第k个扫描角度、第i个标记点r在平行于探测器行的水平、竖直方向上的投影地址,描述为下式(2),分别表示第1个扫描角度下第i个标记点r在圆轨迹坐标系下分别在x、y、z方向的坐标值,描述为下式(3):
14、
15、
16、步骤22,利用下式(4)计算出系统内参,内参包括射线源的焦点到探测器的垂直距离f以及射线源的焦点在探测器上的垂足坐标(vs,ws),s表示射线源的焦点:
17、
18、其中,u=v×w,u表示探测器平面的法方向的方向向量。
19、进一步地,步骤4中均方误差的优化模型描述为下式(5):
20、
21、其中,η表示待求解的系统外参,f为射线源的焦点到探测器的垂直距离,(vs,ws)为射线源的焦点在探测器上的垂足坐标,为提取的第i个标记点r的投影坐标,为根据估计的参数η计算出的第i个标记点r的投影地址;
22、模体坐标系下任意一点r的投影地址表示为下式(6):
23、
24、式中,r=(rx,ry,rz),(vr,wr)为标记点r在探测器上的投影地址,u、v、w分别为探测器所在平面的法方向、平行于探测器行的水平方向、平行于探测器列的竖直方向的向量。
25、本发明还提供一种c型臂ct系统中几何参数的标定装置,其包括:
26、系统内参计算单元,其用于先在c型机架中间的转台上竖直放置螺旋线模体的情形下,通过将模体随转台旋转而c型臂保持不动,获取圆轨迹锥束扫描方式下模体的投影数据,再利用圆轨迹几何参数标定方法求解出不随角度变化的系统内参;其中,内参包括射线源的焦点到探测器的垂直距离f、射线源的焦点在探测器上的垂足坐标(vs,ws);
27、投影图像获取单元,其用于在c型机架中间的载物台上水平放置模体的情形下,通过c型臂扫描并保持模体不动,获取c型臂扫描方式下模体的投影数据;
28、优化模型建立单元,其用于根据c型臂扫描模体的投影数据、标记点的总数,确定模体上第i个标记点r在探测器上的投影地址并建立模体坐标系下单个扫描角度下第i个标记点r的预测投影地址及提取第i个标记点r的投影地址的均方误差的优化模型;
29、内参和外参重建单元,其用于求解该优化模型,得到随角度变化的外参,并将所估计的内参和外参用于重建;其中,外参包括射线源的焦点坐标(sx,sy,sz),探测器的面内旋转角α、俯仰角β、倾斜角γ。
30、进一步地,模体包括圆管状的支撑体,在支撑体的内壁与外壁之间的壁体内设置有预设数量n和预设位置并被标记有顺序的标记点r,标记点r从支撑体的一端到另一端呈螺旋状排列,标记点r的中心依序连接可形成螺旋线,系统内参计算单元中的螺旋线的中心轴与转台的旋转轴方向基本一致,投影图像为x射线穿透模体在平板探测器上的投影图像。
31、进一步地,标记点r为预设直径的球状结构体。
32、进一步地,系统内参计算单元具体包括:
33、步骤21,通过最小化标记点r在多个角度下投影地址与提取的投影地址的均方误差,得到圆轨迹几何参数标定的优化模型建立如下式(1),将探测器水平方向的向量设置为v=(vx,vy,vy)t,探测器竖直方向的向量设置为w=(wx,wy,wz)t,vx、vy、vy、wx、wy、wz表示探测器水平、竖直方向向量在圆轨迹坐标系统中分别在x轴、y轴、z轴的分量:
34、
35、其中,ξk、ξ1分别为第k个、第1个扫描角度下圆轨迹锥束扫描系统的几何参数,sdd为射线源的焦点到转轴的垂直距离sod的延长线与探测器的交点os与射线源的焦点之间的距离,a、b、γ分别为探测器绕三个坐标轴的旋转角,(vo,wo)为交点os在探测器上的坐标,m为扫描角度的总数,n表示标记点r的总数,e(ξ1)为目标函数,θk表示第k个扫描角度的角度值,分别为第k个扫描角度、第i个标记点r在平行于探测器行的水平、竖直方向上的投影地址,分别为预测到的第k个扫描角度、第i个标记点r在平行于探测器行的水平、竖直方向上的投影地址,描述为下式(2),分别表示第1个扫描角度下第i个标记点r在圆轨迹坐标系下分别在x、y、z方向的坐标值,描述为下式(3):
36、
37、
38、步骤22,利用下式(4)计算出系统内参,内参包括射线源的焦点到探测器的垂直距离f以及射线源的焦点在探测器上的垂足坐标(vs,ws),s表示射线源的焦点:
39、
40、其中,u=v×w,u表示探测器平面的法方向的方向向量。
41、进一步地,步骤5中,模体坐标系下单个扫描角度的优化模型建立如下式(5):
42、
43、其中,η表示待求解的系统外参,f为射线源的焦点到探测器的垂直距离,(vs,ws)为射线源的焦点在探测器上的垂足坐标,为提取的第i个标记点r的投影坐标,为根据参数η计算出的第i个标记点r的投影地址;
44、模体坐标系下任意一点r的投影地址表示为下式(6):
45、
46、式中,r=(rx,ry,rz),(vr,wr)为标记点r在探测器上的投影地址,u、v、w分别为探测器所在平面的法方向、平行于探测器行的水平方向、平行于探测器列的竖直方向的向量。
47、本发明由于采取以上技术方案,其具有以下优点:
48、1.本发明将几何参数分开,内参可以较准确地估计出来,外参则很好地去相关,因此很容易通过最小二乘方法进行估计。该方法提高了参数求解的鲁棒性,对于实际的c型臂ct系统,其实用性也得到了很好的验证。
49、2.本发明基于广泛应用的螺旋线模体,相比与另一种常用的双圆周的标定模体,该模体具有较好的空间分布,且更容易调整空间分布,设计合适的模体,避免标记点重叠引起参数求解误差。
- 还没有人留言评论。精彩留言会获得点赞!