一种基于零力控制的主从双边控制方法与流程
本申请涉及医疗器械领域,具体而言,涉及一种基于零力控制的主从双边控制方法。
背景技术:
1、由视网膜玻璃体等眼内组织病变引起的眼睛疾病通常需要进行手术治疗;由于眼内操作空间狭小、操作尺度细微及操作力微小,对医生的力感知能力及操作精度的要求极为苛刻,近乎达到人类的生理极限。
2、为解决由于人手的颤抖以及对微小操作力的有限感知能力造成的眼内手术操作困难的问题,研究者们将目光投向了机器人系统。机器人系统具有操作精度高,运动稳定等特点,能够在一定程度上克服上述难题,从而具有降低手术操作难度及提高手术效果的潜能。主从式手术机器人能滤除医生的手震,放大力反馈,给医生提供直观的工作环境,从而提高进行手术时的定位精度,使手术更安全,更有效。但直接映射主手位置与眼组织接触力存在医生无法直观感受眼组织接触力以及主从映射时间延迟等问题。
技术实现思路
1、本申请提供一种基于零力控制的主从双边控制方法,以改善上述问题。
2、本发明具体是这样的:
3、一种基于零力控制的主从双边控制方法,用于控制眼科手术机器人系统,包括:
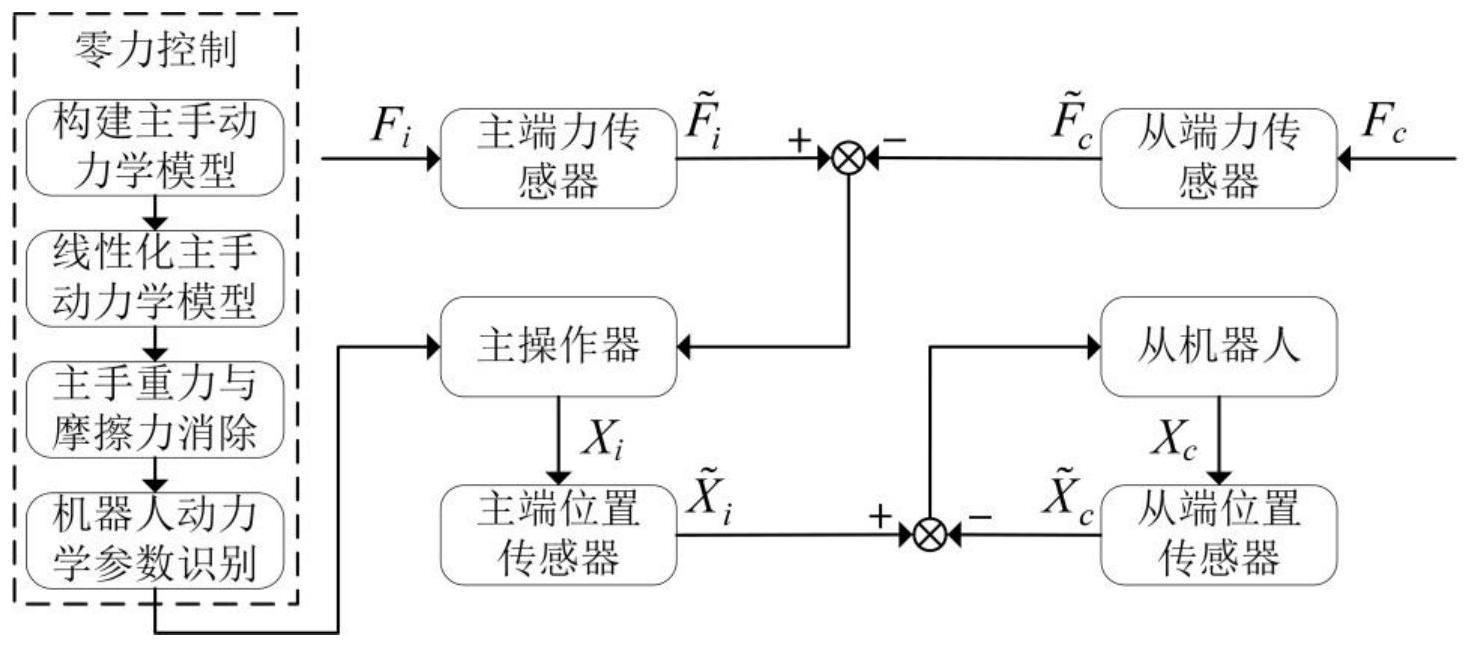
4、通过零力控制对主手的重力和摩擦力进行补偿;
5、将人手操作力与映射后的眼组织接触力作为主手控制器的输入控制主手运动,以实现医生对眼组织接触力的精确感知;
6、将主手的位置与从手的位置作为从手控制器的输入,精确控制从手的运动,从而实现主手及从手的力与位置的双边映射。
7、在本发明的一种实施例中,通过零力控制对主手的重力和摩擦力进行补偿的步骤包括;
8、构建主手动力学模型,线性化主手动力学模型;
9、消除主手的重力以及摩擦力;
10、机器人动力学参数识别。
11、在本发明的一种实施例中,在消除主手的重力以及摩擦力的步骤之前,基于零力控制的主从双边控制方法还包括:
12、对主手各个位置的重力与摩擦力进行辨识,从而得到精确的模型以应用于控制算法的补偿。
13、在本发明的一种实施例中,构建主手动力学模型,线性化主手动力学模型的步骤包括:
14、在主手由多个连杆组成的情况下,其不带外力项的关节力矩表达式为:
15、
16、其中,q、和分别代表机器人的关节位置、关节速度和关节加速度,m(q)代表的是关节空间下的惯性张量矩阵,代表的是离心力和科里奥利力矩阵,g(q)代表的是重力项矩阵,代表的是库伦摩擦和粘滞摩擦矩阵;
17、与摩擦力无关,为动力学参数项,为摩擦力项;通过适当的线性变换将式(1)转换为:
18、
19、其中,是关于q、和的一个非线性函数矩阵,与机器人动力学参数无关,而p则表示动力学的基本参数集,即,理论上所需要辨识的参数;
20、实际的物理模型中摩擦力不可被忽略,所以得计算机器人的摩擦力分量,可采取库伦粘滞摩擦模型:
21、
22、其中,代表库伦摩擦系数,fv代表粘滞摩擦系数,而sign(·)则代表符号函数。
23、在本发明的一种实施例中,在将主手位置与从手位置作为从手控制器的输入的步骤之前,基于零力控制的主从双边控制方法还包括:
24、使用位置传感器和滤波算法得到主手位置和从手位置,主手位置作为从手控制器的位置前馈,从手位置作为从手控制器的位置反馈。
25、在本发明的一种实施例中,将人手操作力与映射后的眼组织接触力作为主手控制器的输入控制主手运动的步骤包括:
26、将经过滤波后的人手操作力与映射后的眼组织接触力作为主手导纳控制器输入控制主手的运动,主手导纳控制器通过式(4)来实现:
27、
28、其中,md、dd和kd分别代表主手的惯性特性、阻尼特性和刚度特性,x、和分别代表主手的位置、速度和加速度。
29、本发明的有益效果是:
30、该基于零力控制的主从双边控制方法用于控制眼科手术机器人系统,其通过零力控制对主手的重力和摩擦力进行补偿;将人手操作力与映射后的眼组织接触力作为主手控制器的输入控制主手运动,以实现医生对眼组织接触力的精确感知;将主手的位置与从手的位置作为从手控制器的输入,精确控制从手的运动,从而实现主手及从手的力与位置的双边映射。
31、由此,该基于零力控制的主从双边控制方法将零力控制与双边控制结合,消除了操作者感知力中包含的主手重力与摩擦力,使得操作者对眼组织接触力的感知更加直观和准确,从而提高进行手术时的定位精度,使手术更安全,更有效。
技术特征:
1.一种基于零力控制的主从双边控制方法,用于控制眼科手术机器人系统,其特征在于,包括:
2.根据权利要求1所述的基于零力控制的主从双边控制方法,其特征在于:
3.根据权利要求2所述的基于零力控制的主从双边控制方法,其特征在于:
4.根据权利要求2所述的基于零力控制的主从双边控制方法,其特征在于:
5.根据权利要求2所述的基于零力控制的主从双边控制方法,其特征在于:
6.根据权利要求1-5中任意一项所述的基于零力控制的主从双边控制方法,其特征在于:
技术总结
本申请涉及医疗器械领域,具体而言,涉及一种基于零力控制的主从双边控制方法。该基于零力控制的主从双边控制方法用于控制眼科手术机器人系统,其通过零力控制对主手的重力和摩擦力进行补偿;将人手操作力与映射后的眼组织接触力作为主手控制器的输入控制所述主手运动,以实现医生对眼组织接触力的精确感知;将所述主手的位置与从手的位置作为从手控制器的输入,精确控制所述从手的运动,从而实现所述主手及所述从手的力与位置的双边映射。由此,该基于零力控制的主从双边控制方法将零力控制与双边控制结合,消除了操作者感知力中包含的主手重力与摩擦力,使得操作者对眼组织接触力的感知更加直观和准确。
技术研发人员:马维敏,刘建军,张春,郭英爱,杨斯钦
受保护的技术使用者:北京衔微医疗科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!