一种持镜机器人的制作方法
本申请涉及医疗器械,特别是涉及一种持镜机器人。
背景技术:
1、持镜机器人是一种夹持内窥镜并控制内窥镜的姿态和动作的智能医疗器械,其具有定位精度高、运动平稳性好以及降低医生手术劳动强度等优点。
2、现有的持镜机器人由于其动作复杂,操作人员很难判断其具体工作运行状态,进而影响操作人员对持镜机器人的操控。
3、因此,如何提供一种便于操作人员识别工作状态的持镜机器人,是本领域技术人员亟需解决的技术问题。
技术实现思路
1、本申请的目的是提供一种持镜机器人,可以有效提高工作人员对其运行状态的识别。
2、为解决上述技术问题,本申请提供了如下技术方案:
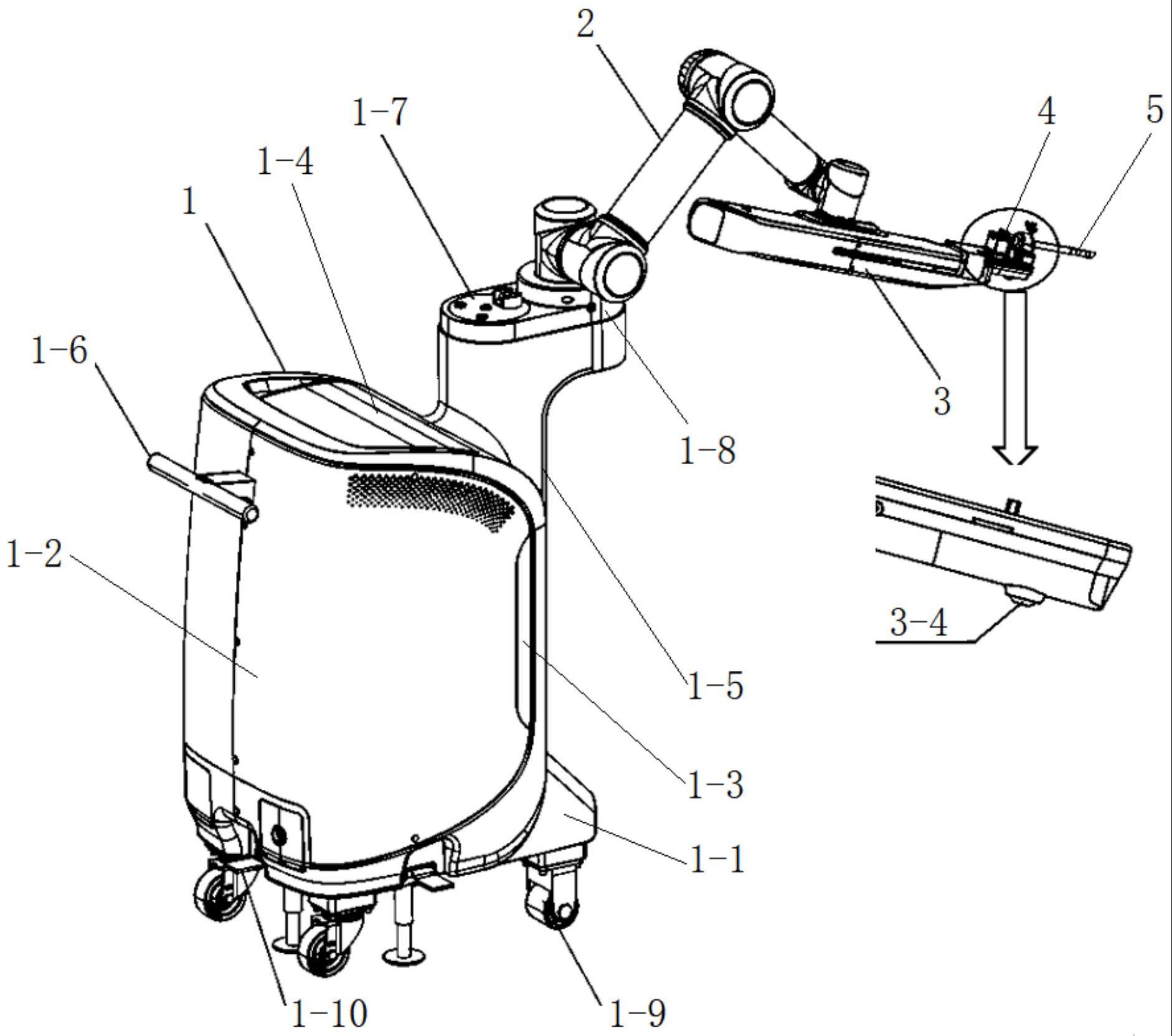
3、一种持镜机器人,包括:机座、机械臂、持镜滑台和夹持机构,所述机械臂的一端与所述机座连接,另一端与所述持镜滑台连接,所述夹持机构连接在所述持镜滑台上,所述夹持机构用于夹持内窥镜,还包括:
4、多色指示灯,设于所述持镜滑台上;
5、远近端操控部,设于所述持镜滑台上,且与所述多色指示灯连接,所述远近端切换操控部被触发时,所述多色指示灯发出第一颜色灯光信号;
6、滑台移动功能操控部,设于所述持镜滑台上,且与所述多色指示灯连接,所述滑台移动功能操控部被触发时,所述多色指示灯发出第二颜色灯光信号。
7、优选地,还包括与所述多色指示灯连接的故障判断模块,所述故障判断模块用于当持镜机器人出现故障时,通过所述多色指示灯发出第三颜色灯光信号。
8、优选地,所述持镜滑台上还设有与所述多色指示灯连接的释能按钮,所述释能按钮用于被触发时,所述多色指示灯发出第四颜色灯光信号。
9、优选地,所述释能按钮设于所述持镜滑台前端的下方。
10、优选地,所述持镜滑台的两侧分别设有一个所述多色指示灯。
11、优选地,所述滑台移动功能操控部设于所述持镜滑台后端的一侧。
12、优选地,所述远近端操控部设于所述持镜滑台的后端。
13、优选地,所述滑台移动功能操控部包括上下左右四个方向按键和一个拔出按键以及一个插入按键。
14、与现有技术相比,上述技术方案具有以下优点:
15、本申请所提供的一种持镜机器人,包括:机座、机械臂、持镜滑台和夹持机构,机械臂的一端与机座连接,另一端与持镜滑台连接,夹持机构连接在持镜滑台上,夹持机构用于夹持内窥镜,还包括:设于持镜滑台上的多色指示灯、远近端操控部和滑台移动功能操控部,其中远近端操控部和滑台移动功能操控部分别与多色指示灯连接,远近端切换操控部被触发时,多色指示灯发出第一颜色灯光信号;滑台移动功能操控部被触发时,多色指示灯发出第二颜色灯光信号。持镜机器人在不同的运行状态下,多色指示灯可以发出不同颜色的灯光信号,便于操作人员醒目了解持镜机器人的运行状态,进而提高持镜机器人运行的安全性。
技术特征:
1.一种持镜机器人,包括:机座、机械臂、持镜滑台和夹持机构,所述机械臂的一端与所述机座连接,另一端与所述持镜滑台连接,所述夹持机构连接在所述持镜滑台上,所述夹持机构用于夹持内窥镜,其特征在于,还包括:
2.根据权利要求1所述的持镜机器人,其特征在于,还包括与所述多色指示灯连接的故障判断模块,所述故障判断模块用于当持镜机器人出现故障时,通过所述多色指示灯发出第三颜色灯光信号。
3.根据权利要求1所述的持镜机器人,其特征在于,所述持镜滑台上还设有与所述多色指示灯连接的释能按钮,所述释能按钮用于被触发时,所述多色指示灯发出第四颜色灯光信号。
4.根据权利要求3所述的持镜机器人,其特征在于,所述释能按钮设于所述持镜滑台前端的下方。
5.根据权利要求1所述的持镜机器人,其特征在于,所述持镜滑台的两侧分别设有一个所述多色指示灯。
6.根据权利要求1所述的持镜机器人,其特征在于,所述滑台移动功能操控部设于所述持镜滑台后端的一侧。
7.根据权利要求1所述的持镜机器人,其特征在于,所述远近端操控部设于所述持镜滑台的后端。
8.根据权利要求1所述的持镜机器人,其特征在于,所述滑台移动功能操控部包括上下左右四个方向按键和一个拔出按键以及一个插入按键。
技术总结
本申请公开了一种持镜机器人,包括:机座、机械臂、持镜滑台和夹持机构,机械臂的一端与机座连接,另一端与持镜滑台连接,夹持机构连接在持镜滑台上,夹持机构用于夹持内窥镜,还包括:设于持镜滑台上的多色指示灯、远近端操控部和滑台移动功能操控部,其中远近端操控部和滑台移动功能操控部分别与多色指示灯连接,远近端切换操控部被触发时,多色指示灯发出第一颜色灯光信号;滑台移动功能操控部被触发时,多色指示灯发出第二颜色灯光信号。持镜机器人在不同的运行状态下,多色指示灯可以发出不同颜色的灯光信号,便于操作人员醒目了解持镜机器人的运行状态,进而提高持镜机器人运行的安全性。
技术研发人员:李耀
受保护的技术使用者:成都博恩思医学机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!