一种软镜机器人的驱动系统以及软镜机器人的制作方法
本发明涉及医疗机器人,特别是涉及一种软镜机器人的驱动系统以及软镜机器人。
背景技术:
1、通过医疗机器人进行内窥镜检查和治疗,是现代临床上常用的检查手段和治疗方法,亦是微创诊断和治疗的发展方向。例如,肾输尿管软镜常被用做泌尿科的肾输尿管疾病的检查和治疗,支气管镜常被用做呼吸科的支气管和肺部疾病的检查和治疗,胃镜和肠镜常被用做消化道疾病的检查和治疗等。这些内窥镜设备经过人体天然的泌尿系统或呼吸系统腔道或消化道,对人体内部病变位置进行相应检查和治疗,无需对人体进行任何切口,具有损伤小、疼痛轻、恢复快等微创优点,已被广泛应用在外科的诊疗中,成为主要的临床诊疗方法。
2、以软镜机器人为例,传统的软镜机器人系统通过驱动支气管镜在人体腔道内前进、后退、旋转并最终达到指定位置进行工作,支气管镜难免会与人体组织接触,因此,为了保持医疗工作中的安全卫生,现有的支气管镜往往是一次性使用的。
3、但是,现有的软镜机器人系统中,为了精确控制支气管镜的移动和工作,驱动结构往往设计得很复杂,而且与支气管镜连接牢固,因此使用前后的拆装步骤多,操作困难,在需要反复拆装使用的医疗工作环境中,使用不方便。
4、因此,现有技术还有待于改进和发展。
技术实现思路
1、鉴于上述现有技术的不足,本发明的目的在于提供一种软镜机器人的驱动系统以及软镜机器人,旨在解决现有的软镜机器人使用过程中装配不灵活,使用不方便的问题。
2、本发明的技术方案如下:
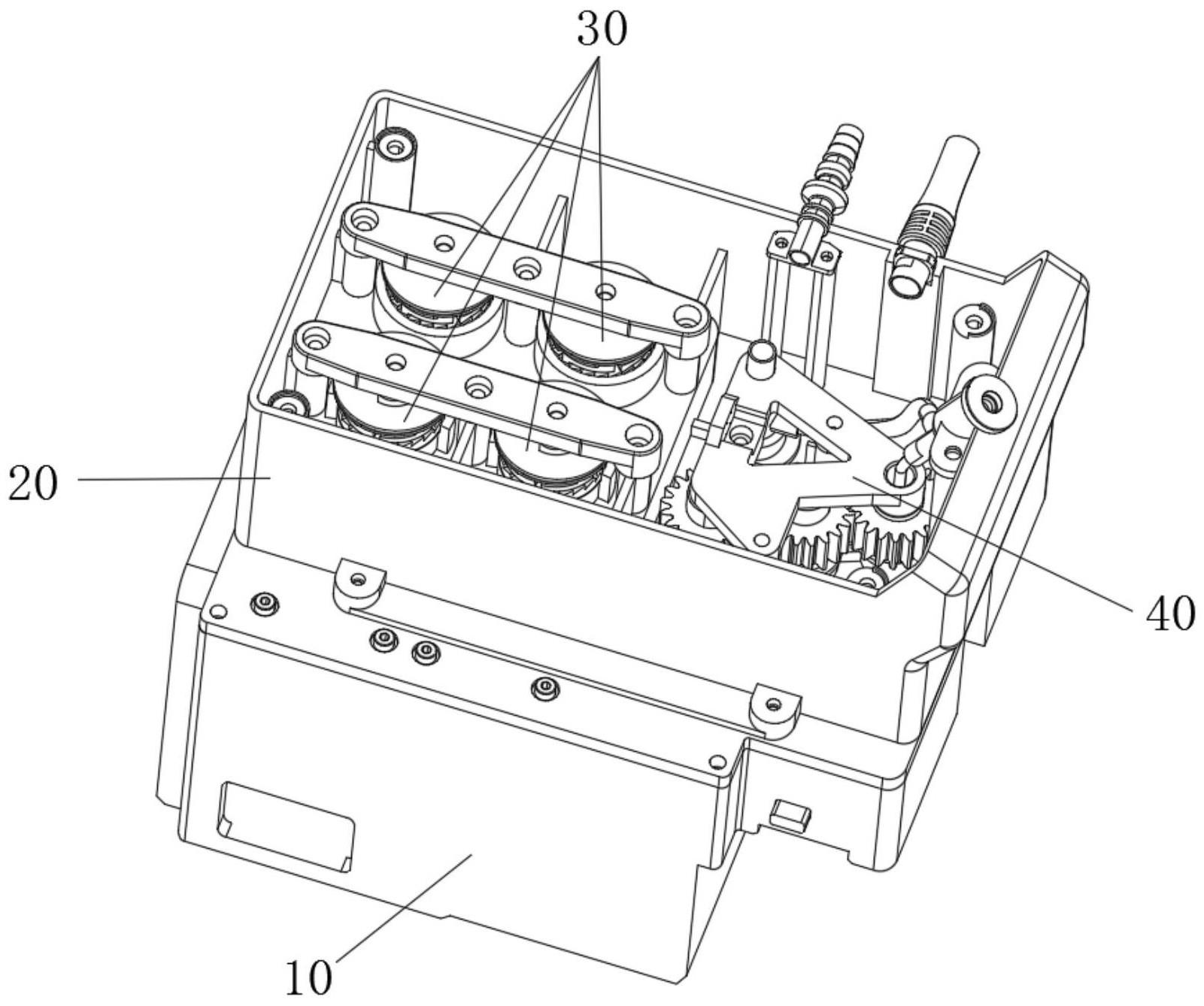
3、一种软镜机器人的驱动系统,用于驱动所述软镜机器人的支气管镜;其中,包括驱动仓、器械仓、转轴部件和吸痰部件,所述驱动仓的顶部设置有第一驱动部件和第二驱动部件;所述器械仓设置在所述驱动仓的上方,用于对接所述支气管镜;所述器械仓与所述驱动仓可拆卸装配;所述器械仓的底面形成有第一装配通孔和第二装配通孔;所述转轴部件设置在所述器械仓内,用于盘绕所述支气管镜的牵引绳;所述转轴部件插设在所述第一装配通孔内;所述吸痰部件设置在所述器械仓内,用于连接所述支气管镜的吸痰导管;所述吸痰部件插设在所述第二装配通孔内;当所述驱动仓与所述器械仓装配时,所述第一驱动部件插入至所述第一装配通孔内,与所述转轴部件传动连接;所述第二驱动部件插入至所述第二装配通孔内,与所述吸痰部件传动连接。
4、所述的软镜机器人的驱动系统,其中,所述第一驱动部件设置有2-4个,所述转轴部件与所述第一驱动部件对应设置;每一所述转轴部件连接一条所述牵引绳。
5、所述的软镜机器人的驱动系统,其中,所述第一驱动部件和所述转轴部件均设置四个,四个所述转轴部件两两一组,对称分布在所述器械仓的两侧;并且,每一组所述转轴部件上盘绕牵引绳的方向相同。
6、所述的软镜机器人的驱动系统,其中,所述第一驱动部件包括第一驱动电机、第一传动组件和第一伞形齿轮,所述第一驱动电机设置在所述驱动仓内;所述第一传动组件设置在所述驱动仓上;所述第一传动组件的底端延伸至所述驱动仓内,与所述第一驱动电机的动力输出端传动连接;所述第一伞形齿轮设置在所述第一传动组件的顶端;所述转轴部件的底端设置有第一连接部,所述第一连接部与所述第一伞形齿轮啮合传动。
7、所述的软镜机器人的驱动系统,其中,所述第一传动组件包括法兰座和弹性件,所述法兰座一侧套设在所述第一驱动电机的动力输出端上,另一侧形成有滑动槽;所述弹性件和所述第一伞形齿轮堆叠设置于所述滑动槽内,所述弹性件用于弹性支撑所述第一伞形齿轮。
8、所述的软镜机器人的驱动系统,其中,所述第一伞形齿轮的侧壁上设置有骨位,所述法兰座内设置轴向延伸的卡槽,所述骨位与所述卡槽相配合,所述卡槽用于约束所述骨位。
9、所述的软镜机器人的驱动系统,其中,所述吸痰部件包括:三通端头、器械管道、吸痰阀门、连接软管、镜体转轴和传动齿轮组,所述三通端头固定在所述器械仓内,包括相对设置的第一端口、第二端口,和位于侧面的第三端口,所述第一端口上设有密封帽;所述器械管道设置在所述器械仓内,与所述第二端口对接;所述吸痰阀门设置在所述器械仓内,与外部的真空发生设备连接;所述连接软管一端与所述吸痰阀门连接,另一端与所述第三端口对接。
10、所述的软镜机器人的驱动系统,其中,所述第二驱动部件包括第二驱动电机、第二传动组件和第二伞形齿轮,所述第二驱动电机设置在所述驱动仓内;所述第二传动组件设置在所述驱动仓上;所述第二传动组件的底端延伸至所述驱动仓内,与所述第二驱动电机的输出端传动连接;所述第二伞形齿轮设置在所述第二传动组件的顶端;所述吸痰阀门的底端设置有第二连接部,所述第二连接部与所述第二伞形齿轮啮合传动,所述第二驱动电机用于驱动所述吸痰阀门转动,打开或关闭与外部真空设备的连接。
11、所述的软镜机器人的驱动系统,其中,所述第二驱动部件还包括第三驱动电机、第三传动组件和第三伞形齿轮,所述第三驱动电机设置在所述驱动仓内;所述第三传动组件设置在所述驱动仓上;所述第三传动组件的底端延伸至所述驱动仓内,与所述第三驱动电机的输出端传动连接;所述第三伞形齿轮设置在所述第三传动组件的顶端;所述镜体转轴设置在所述器械仓内;所述传动齿轮组一端连接至所述镜体转轴,另一端连接至所述支气管镜;所述镜体转轴的底端设置有第三连接部,所述第三连接部与所述第三伞形齿轮啮合传动,所述第三驱动电机用于驱动所述传动齿轮组转动,进而带动所述支气管镜转动。
12、本申请还公开了一种软镜机器人,其中,包括支气管镜和第三驱动部件,以及如上任一所述的软镜机器人的驱动系统,所述支气管镜连接至所述器械仓内,所述第一驱动部件用于驱动所述支气管镜前端的转向操作,所述第二驱动部件用于驱动所述支气管镜的吸痰操作和/或转动操作,所述第三驱动部件用于驱动所述支气管镜的前进和/或后退操作,所述支气管镜用于介入被检测体以进行检测和/或吸取痰液。
13、与现有技术相比,本发明实施例具有以下优点:
14、本发明公开的驱动系统用于驱动软镜机器人的支气管镜,驱动仓内设置的第一驱动部件和第二驱动部件用于提供动力,器械仓内设置的转轴部件和吸痰部件用于连接和控制支气管镜,通过驱动支气管镜在人体内移动以及移动到位之后驱动支气管镜进行吸痰、检查、手术等动作,完成微创介入工作。
15、在单次工作结束之后,由于医疗器材只能一次性使用,因此需要更换新的支气管镜才能再次工作,设置驱动仓与器械仓可拆卸装配,方便将器械仓从驱动仓上拆除,以进行支气管镜的拆装工作,方便达到可以快速更换的效果;更换支气管镜之后,只需要将器械仓装回到驱动仓上,同时完成转轴部件与第一驱动部件的传动连接,吸痰部件与第二驱动部件的传动连接,可快速完成组装流程,从而便于提高软镜机器人的使用效率,方便使用。
技术特征:
1.一种软镜机器人的驱动系统,用于驱动所述软镜机器人的支气管镜;其特征在于,包括:
2.根据权利要求1所述的软镜机器人的驱动系统,其特征在于,所述第一驱动部件设置有2-4个,所述转轴部件与所述第一驱动部件对应设置;每一所述转轴部件连接一条所述牵引绳。
3.根据权利要求2所述的软镜机器人的驱动系统,其特征在于,所述第一驱动部件和所述转轴部件均设置四个,四个所述转轴部件两两一组,对称分布在所述器械仓的两侧;并且,每一组所述转轴部件上盘绕牵引绳的方向相同。
4.根据权利要求1-3任意一项所述的软镜机器人的驱动系统,其特征在于,所述第一驱动部件包括:
5.根据权利要求4所述的软镜机器人的驱动系统,其特征在于,所述第一传动组件包括法兰座和弹性件,所述法兰座一侧套设在所述第一驱动电机的动力输出端上,另一侧形成有滑动槽;所述弹性件和所述第一伞形齿轮堆叠设置于所述滑动槽内,所述弹性件用于弹性支撑所述第一伞形齿轮。
6.根据权利要求5所述的软镜机器人的驱动系统,其特征在于,所述第一伞形齿轮的侧壁上设置有骨位,所述法兰座内设置轴向延伸的卡槽,所述骨位与所述卡槽相配合,所述卡槽用于约束所述骨位。
7.根据权利要求1所述的软镜机器人的驱动系统,其特征在于,所述吸痰部件包括:
8.根据权利要求7所述的软镜机器人的驱动系统,其特征在于,所述第二驱动部件包括:
9.根据权利要求7或8所述的软镜机器人的驱动系统,其特征在于,所述第二驱动部件还包括:
10.一种软镜机器人,其特征在于,包括支气管镜和第三驱动部件,以及如权利要求1至9任意一项所述的软镜机器人的驱动系统,所述支气管镜连接至所述器械仓内,所述第一驱动部件用于驱动所述支气管镜前端的转向操作,所述第二驱动部件用于驱动所述支气管镜的吸痰操作和/或转动操作,所述第三驱动部件用于驱动所述支气管镜的前进和/或后退操作,所述支气管镜用于介入被检测体以进行检测和/或吸取痰液。
技术总结
本发明公开了一种软镜机器人的驱动系统以及软镜机器人,驱动系统用于驱动软镜机器人的支气管镜;其中,包括驱动仓、器械仓、转轴部件和吸痰部件,驱动仓的顶部设置有第一驱动部件和第二驱动部件;器械仓设置在驱动仓的上方,与支气管镜对接;器械仓与驱动仓可拆卸装配;并且,器械仓的底面形成有第一装配通孔和第二装配通孔;转轴部件和吸痰部件均设置在器械仓内;转轴部件插设在第一装配通孔内;吸痰部件插设在第二装配通孔内;当驱动仓与器械仓装配时,第一驱动部件插入至第一装配通孔内,与转轴部件传动连接;第二驱动部件插入至第二装配通孔内,与吸痰部件传动连接。通过灵活装配驱动仓与器械仓,便于一次性使用。
技术研发人员:刘小平,马高祯,安世龙,白晓淞
受保护的技术使用者:深圳英美达医疗技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!