基于影像的颅内电极定位方法、系统、计算机设备及介质
本发明涉及植入式医疗,特别是涉及一种基于影像的颅内电极定位方法、系统、计算机设备及存储介质。
背景技术:
1、颅内电极是一种特殊材质的多触点的电极,其最大的优点是可以直接记录脑皮层或者脑深部的电活动,并可以短期或者长期植入颅内。植入被试大脑的电极可用于记录脑电波或发射电流以刺激受试者使其大脑产生变化。立体定向脑电图(seeg),属于颅内深部电极,是目前临床上常用的一种有创脑波记录方法,可以准确地记录皮层下结构和皮层深处的脑电信号,尤其在对癫痫的电生理机制研究及评估方面意义重大。seeg电极的放置是一个非常复杂的神经外科手术过程,尤其是定位与神经解剖相关的电极触点,由于无法获得seeg的术中照片,其定位难度较大。且seeg电极放置于大脑深部区域后,解剖位置多、电极触点多、长时程记录仍需肉眼进行判断,这种工作不仅是劳动密集型,还不能对大脑相关脑区解剖位置进行定性和定量分析。
2、因此,在使用颅内电极记录脑波信号时,往往存在电极定位或植入困难的问题。
技术实现思路
1、基于此,为了解决上述技术问题,提供一种基于影像的颅内电极定位方法、系统、计算机设备及存储介质,可以提高电极定位以及植入的精确度。
2、一种基于影像的颅内电极定位方法,所述方法包括:
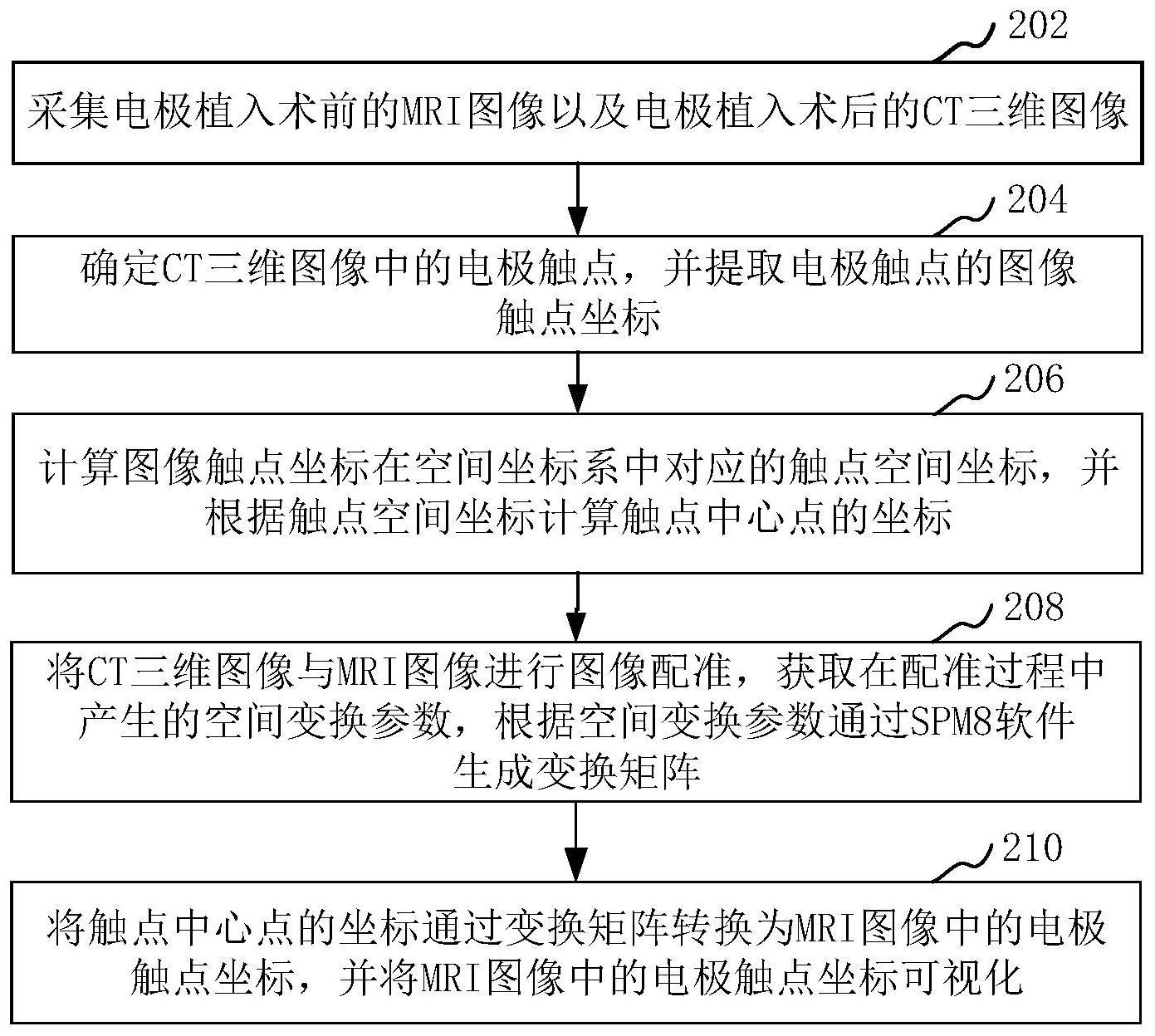
3、采集电极植入术前的mri图像以及电极植入术后的ct三维图像;
4、确定所述ct三维图像中的电极触点,并提取所述电极触点的图像触点坐标;
5、计算所述图像触点坐标在空间坐标系中对应的触点空间坐标,并根据所述触点空间坐标计算触点中心点的坐标;
6、将所述ct三维图像与所述mri图像进行图像配准,获取在配准过程中产生的空间变换参数,根据所述空间变换参数通过spm8软件生成变换矩阵;
7、将所述触点中心点的坐标通过所述变换矩阵转换为所述mri图像中的电极触点坐标,并将所述mri图像中的电极触点坐标可视化。
8、在其中一个实施例中,所述确定所述ct三维图像中的电极触点,并提取所述电极触点的触点坐标,包括:
9、根据所述ct三维图像提取ct值,并获取ct阈值;
10、比较所述ct值与所述ct阈值,并根据比较结果确定所述ct三维图像中的电极触点;
11、基于所述ct三维图像中的脑组织影像,确定所述电极触点的图像触点坐标。
12、在其中一个实施例中,所述将所述ct三维图像与所述mri图像进行图像配准,获取在配准过程中产生的空间变换参数,包括:
13、获取与所述ct三维图像对应患者的脑组织参数,在spm8软件中通过指数列代数的异形体注册模块,结合所述脑组织参数生成变形参数;
14、根据所述变形参数生成所述空间变换参数。
15、在其中一个实施例中,所述方法还包括:
16、根据所述触点中心点的坐标,确定所述图像中的电极触点坐标对应电极触点所在的功能区;
17、使用不同颜色对所述功能区进行标注。
18、在其中一个实施例中,将所述mri图像中的电极触点坐标可视化,包括:
19、查找与所述mri图像中的电极触点坐标对应的所述功能区;
20、在显示屏中展示所述mri图像中的电极触点,并展示对应颜色的所述功能区。
21、在其中一个实施例中,所述方法还包括:
22、在spm8软件中,将所述ct三维图像作为原图像,将所述mri图像作为参考图像;
23、将所述ct三维图像与所述mri图像进行配准,并定义所述功能区。
24、在其中一个实施例中,将所述ct三维图像与所述mri图像进行配准,并定义所述功能区,包括:
25、将所述ct三维图像与所述mri图像进行配准,其中,所述ct三维图像为具有电极植入后的ct图像,所述mri图像为重采样和重定向的术前获取的mri图像;
26、通过spm8软件处理所述mri图像重定向,生成灰质和白质图像;
27、通过spm8软件对所述灰质和白质图像进行扭曲,生成个性化图谱,并确定所述个性化图谱中的功能区。
28、一种基于影像的颅内电极定位系统,所述系统包括:
29、图像采集模块,用于采集电极植入术前的mri图像以及电极植入术后的ct三维图像;
30、触点坐标确定模块,用于确定所述ct三维图像中的电极触点,并提取所述电极触点的图像触点坐标;
31、触点中心点的坐标计算模块,用于计算所述图像触点坐标在空间坐标系中对应的触点空间坐标,并根据所述触点空间坐标计算触点中心点的坐标;
32、变换矩阵生成模块,用于将所述ct三维图像与所述mri图像进行图像配准,获取在配准过程中产生的空间变换参数,根据所述空间变换参数通过spm8软件生成变换矩阵;
33、坐标转换模块,用于将所述触点中心点的坐标通过所述变换矩阵转换为所述mri图像中的电极触点坐标,并将所述mri图像中的电极触点坐标可视化。
34、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
35、采集电极植入术前的mri图像以及电极植入术后的ct三维图像;
36、确定所述ct三维图像中的电极触点,并提取所述电极触点的图像触点坐标;
37、计算所述图像触点坐标在空间坐标系中对应的触点空间坐标,并根据所述触点空间坐标计算触点中心点的坐标;
38、将所述ct三维图像与所述mri图像进行图像配准,获取在配准过程中产生的空间变换参数,根据所述空间变换参数通过spm8软件生成变换矩阵;
39、将所述触点中心点的坐标通过所述变换矩阵转换为所述mri图像中的电极触点坐标,并将所述mri图像中的电极触点坐标可视化。
40、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
41、采集电极植入术前的mri图像以及电极植入术后的ct三维图像;
42、确定所述ct三维图像中的电极触点,并提取所述电极触点的图像触点坐标;
43、计算所述图像触点坐标在空间坐标系中对应的触点空间坐标,并根据所述触点空间坐标计算触点中心点的坐标;
44、将所述ct三维图像与所述mri图像进行图像配准,获取在配准过程中产生的空间变换参数,根据所述空间变换参数通过spm8软件生成变换矩阵;
45、将所述触点中心点的坐标通过所述变换矩阵转换为所述mri图像中的电极触点坐标,并将所述mri图像中的电极触点坐标可视化。
46、上述基于影像的颅内电极定位方法、系统、计算机设备及存储介质,通过采集并结合电极植入术前的mri图像以及电极植入术后的ct三维图像,可以对颅内电极进行定位,并确定电极触点所在脑区,大幅改善了以往电极定位和标记需要完全手动执行的情境,可以在确定电极位置的基础上大幅减少临床医生判断位置的时间和精力损耗;由于使用了spm8软件,spm8软件是程式化的,只需要选择源文件和对应的运行模式即可完成配准的操作,而无需自编代码,对于操作人员上手难度低,适用性较广;由于对每个电极触点的位置可视化,可以更加清晰看到电极触点的位置,提高电极植入的精度。
- 还没有人留言评论。精彩留言会获得点赞!